19547352
Description
Quiz by Lourdes Soto, updated more than 1 year ago
|
|
Created by Lourdes Soto
about 5 years ago
|
|
Question 1
Question
Una de las funciones principales de un S. O. es el control de todos los dispositivos de E/S de la computadora. ¿Cuál de las siguientes opciones NO es verdadera?
Answer
-
El código de E/S representa una fracción significativa del S. O.
-
El uso inapropiado de los dispositivos de E/S frecuentemente genera ineficiencias del sistema, lo que afecta la performance global.
-
El código de E/S representa una fracción minúscula del S. O.
Question 2
Question
¿Cuáles de las siguientes características corresponden a dispositivos de E/S de bloque?
Answer
-
Se puede leer o escribir en un bloque de forma independiente de los demás, en cualquier momento.
-
Un ejemplo típico son los discos.
-
La información se almacena en bloques de tamaño fijo y cada bloque tiene su propia dirección.
-
Los tamaños más comunes de los bloques van desde los 128 bytes hasta los 1.024 bytes.
-
La información se transfiere como un flujo de caracteres y no se pueden utilizar direcciones.
-
Un ejemplos típico son las impresoras de línea, terminales, interfaces de una red, ratones, etc.
-
No tienen una operación de búsqueda.
Question 3
Question
Todos los dispositivos se ajustan a el esquema de clasificación anterior incluido los relojes.
Answer
- True
- False
Question 4
Question
Las unidades de E/s generalmente constan de:
[blank_start]Un componente mecánico[blank_end] que se conecta con el o los dispositivos.
[blank_start]Un componente electrónico[blank_end]: el controlador del dispositivo o adaptador que pueden manejar más de un dispositivo al mismo tiempo. El S. O. generalmente trabaja con el controlador y no con el dispositivo.
Los modelos más frecuentes de comunicación entre la cpu y los controladores son:
Para la mayoría de las micro y mini computadoras: modelo de [blank_start]bus del sistema[blank_end].
Para la mayoría de los mainframes: modelo de varios buses y computadoras especializadas en E/S llamadas [blank_start]canales de E/S[blank_end].
Answer
-
Un componente mecánico
-
Un componente electrónico
-
bus del sistema
-
canales de E/S
Question 5
Question
Cada controlador posee [blank_start]registros[blank_end] que utiliza para comunicarse con la cpu:
Pueden ser parte del espacio normal de direcciones de la memoria: [blank_start]E/S mapeada a memoria[blank_end].
Pueden utilizar un espacio de [blank_start]direcciones especial para la E/S[blank_end], asignando a cada controlador una parte de él.
Answer
-
registros
-
E/S mapeada a memoria
-
direcciones especial para la E/S
Question 6
Question
Pasos para la comunicación entre el S.O. y los contoladores con el uso de registros.
1) El S.O. realiza la E/S al [blank_start]escribir comandos en los registros[blank_end] de los controladores; los parámetros de los comandos también se cargan en los registros de los controladores.
2) Al aceptar el comando, la CPU [blank_start]puede dejar al controlador[blank_end] y dedicarse a otro trabajo.
3) Al terminar el comando, [blank_start]el controlador provoca una interrupción[blank_end] para permitir que el S.O.: obtenga el control de la CPU y verifique los resultados de la operación.
4) La CPU [blank_start]obtiene los resultados[blank_end] y el estado del dispositivo al leer uno o más bytes de información de los registros del controlador.
Answer
-
escribir comandos en los registros
-
puede dejar al controlador
-
el controlador provoca una interrupción
-
obtiene los resultados
Question 7
Question
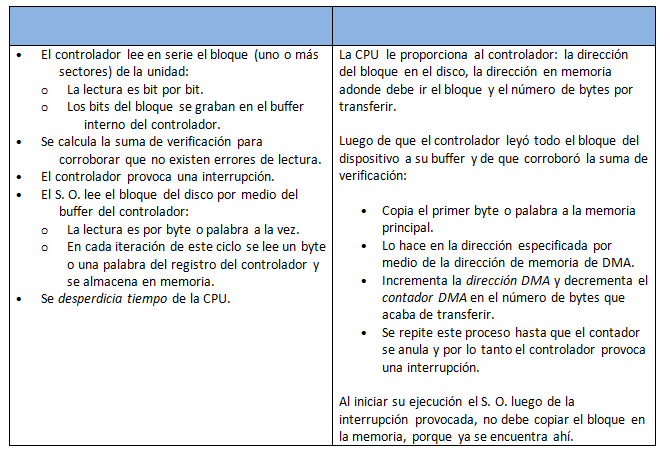
Muchos controladores, especialmente los correspondientes a dispositivos de bloque, permiten el DMA (Acceso Directo a Memoria). Lo mismo permite liberar a la CPU de un trabajo de bajo nivel. ¿Cuál de las siguientes imágenes corresponde a una lectura de disco SIN DMA y cuál a una con DMA ?
Image:
Dma (binary/octet-stream)
{kind=link}
Answer
-
SIN DMA
-
Con DMA
Question 8
Question
Los controladores simples pueden atender la E/S simultánea.
Answer
- True
- False
Question 9
Question
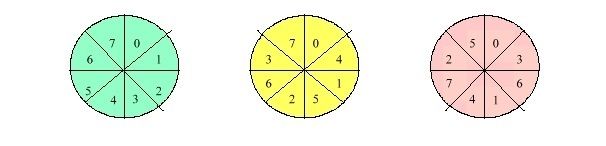
Los factores de separación dan tiempo al controlador para terminar de transferir un bloque de datos a memoria antes de empezar a leer el siguiente. Son necesarios cuando este tiempo de transferencia es mayor al tiempo de lectura de un sector por lo tanto más de un bloque se pierde. Permiten al S. O.: leer los bloques con numeración consecutiva y conservar la máxima velocidad posible del hardware.
{kind=link}
Answer
-
Sin separación
-
Separación simple
-
Separación doble
Question 10
Question
Un objetivo de software de E/S es que todos los archivos y dispositivos adquieran direcciones de la misma forma, es decir mediante el nombre de su ruta de acceso.
Answer
- True
- False
Question 11
Question
El sotftware de E/S se estructura en capas: de la de menor nivel a la de mayor nivel
1- [blank_start]Manejador de Interrupciones[blank_end]
2- [blank_start]Manejador de dispositivos[blank_end]
3- [blank_start]Software independiente del dispositivo[blank_end]
4- [blank_start]Software a nivel del usuario[blank_end]
Answer
-
Software a nivel del usuario
-
Software independiente del dispositivo
-
Manejador de dispositivos
-
Manejador de Interrupciones
Question 12
Question
El manejador de disco debe hacer muchas acciones, ¿cuál de las siguientes no es una de ellas?
Answer
-
Proporcionar una interfaz uniforme del software a nivel usuario.
-
Regresa información de estado sobre los errores a quien lo llamó.
-
Si todo esta bien transferirá los datos al software independiente del dispositivo.
-
Al finalizar la operación debe verificar los errores.
-
Estimar el lugar donde se encuentra en realidad el bloque solicitado, verificar si el motor de la unidad funciona y si el brazo está colocado en el cilindro adecuado.
Question 13
Question
Las funciones básicas del software independiente del dispositivo son variadas, ¿cuál NO es una de ellas?
Answer
-
Sistema de spooling.
-
Efectuar las funciones de E/S comunes a todos los dispositivos.
-
Proporcionar una interfaz uniforme del software a nivel usuario.
-
Asociar los nombres simbólicos de los dispositivos con el nombre adecuado.
Question 14
Question
El software independiente del dispositivo debe ocultar a los niveles superiores los diferentes tamaños de sector de los distintos discos y proporcionar un tamaño UNIFORME DE BLOQUE por ejemplo al considerar varios sectores físicos como un bloque lógico.
Answer
- True
- False
Question 15
Question
Los controladores pueden leer o escribir en dos unidades al mismo tiempo.
Answer
- True
- False
Question 16
Question
En la mayoría de los discos, el "tiempo de búsqueda" supera al de "retraso rotacional" y al de "transferencia", debido a ello, la reducción del tiempo promedio de búsqueda puede mejorar en gran medida el rendimiento del sistema.
Answer
- True
- False
Question 17
Question
En algunos discos, el tiempo promedio de búsqueda ya es menor que el retraso rotacional por lo los algoritmos que optimizan los tiempos de búsqueda perderán importancia frente a los algoritmos que optimicen el retraso rotacional.
Answer
- True
- False
Question 18
Question
¿Por qué es necesaria la planificación de discos en los sistemas de multiprogramación?
Answer
-
La generación de peticiones por parte de los procesos puede ser mucho más rápida que la atención de las mismas. Se construyen líneas de espera o colas para cada dispositivo. Para reducir el tiempo de búsqueda de registros se ordena la cola de peticiones: esto se denomina planificación de disco.
-
La generación de peticiones por parte de los procesos puede ser mucho más lenta que la atención de las mismas. Se construyen líneas de espera o colas para cada dispositivo las cuales no suelen ser ordenadas por el S.O.
-
La generación de peticiones por parte de los procesos puede ser mucho más rápida que la atención de las mismas. Se construyen líneas de espera y para reducir el tiempo de búsqueda de registros se eliminan las peticiones antiguas de las listas.
Question 19
Question
La planificación de disco implica diversas acciones, ¿cuál no corresponde?
Answer
-
Un análisis de las condiciones que provocaron la solicitud de E/S.
-
Un examen cuidadoso de las peticiones pendientes para determinar la forma más eficiente de servirlas.
-
Un reordenamiento de la cola de peticiones para servirlas minimizando los movimientos mecánicos.
-
Un análisis de las relaciones posicionales entre las peticiones en espera.
Question 20
Question
Los tipos más comunes de planificación de discos son:
Answer
-
Optimización de la búsqueda.
-
Optimización rotacional (latencia).
-
Optimización de la transferencia.
Question 21
Question
Bajo cualquier tipo de carga de trabajo es aceptable el desempeño del método FCFS (primero en llegar, primero en ser servido).
Answer
- True
- False
Question 22
Question
La [blank_start]planificación de discos[blank_end] suele mejorar la imagen total lo cual se mide utilizando la varianza de los tiempos de respuesta o [blank_start]predicibilidad[blank_end]. Se desea una política minimice la varianza, es decir que [blank_start]maximice[blank_end] la predecibilidad.
Answer
-
planificación de discos
-
predicibilidad
-
maximice
-
disminuya
Question 23
Question
Mediante trabajos de simulación y de laboratorio se demostró lo siguiente:
[blank_start]La estrategia SCAN[blank_end] es la mejor con carga baja.
[blank_start]La estrategia C - SCAN[blank_end] es la mejor con cargas medias y pesadas.
[blank_start]La estrategia C - SCAN[blank_end] con optimización rotacional es la mejor para cargas muy pesadas (mejor que la estrategia Eschenbach inclusive).
Answer
-
La estrategia SCAN
-
La estrategia C - SCAN
-
La estrategia Eschenbach
-
La estrategia SCAN
-
La estrategia C - SCAN
-
La estrategia Eschenbach
-
La estrategia C - SCAN
-
La estrategia SSTF
-
La estrategia FCFS
Question 24
Question
¿Cuándo es innecesario o poco útil la planificación de discos?
Answer
-
En la distribución de peticiones no uniformes que son frecuentes en procesos secuenciales de archivos secuenciales.
-
En sistemas de tiempo compartido con un nivel alto de multiprogramación.
-
Cuando se concentran grandes cargas de peticiones sobre relativamente pocos discos o pocos cilindros de un disco
Question 25
Question
Los canales o buses unen los controladores con la CPU y hay mucho tráfico en los mismos.
Para ayudar a reducir el embotellamiento del canal, muchos sistemas han incorporado la técnica de examen (sensado) de posición rotacional (RPS). Características:
[blank_start]Reduce el tiempo[blank_end] durante el cual un canal se encuentra ocupado en la búsqueda de un registro.
[blank_start]Permite al canal quedar libre[blank_end] justo hasta antes de que el registro se encuentre debajo de la cabeza de lectura - grabación apropiada.
[blank_start]Permite varias peticiones activas[blank_end] al mismo tiempo en un solo canal, incrementando la performance.
Answer
-
Reduce el tiempo
-
Permite al canal quedar libre
-
Permite varias peticiones activas
Question 26
Question
Algunos de los errores más comunes en discos son:
[blank_start]Error de programación[blank_end]: ej, solicitar un sector no existente.
[blank_start]Error temporal[blank_end] en la suma de verificación: ej, provocado por polvo en la cabeza.
[blank_start]Error permanente[blank_end] en la suma de verificación: ej, un bloque del disco dañado físicamente.
[blank_start]Error de búsqueda[blank_end]: ej, el brazo se envía al cilindro 6 pero va al 7.
[blank_start]Error del controlador[blank_end]: ej, el controlador no acepta los comandos.
Answer
-
Error de programación
-
Error temporal
-
Error permanente
-
Error de búsqueda
-
Error del controlador
Question 27
Question
Los relojes o cronómetros son esenciales para la operación de sistemas de tiempo compartido.¿Cuál NO es una de sus características o funciones?
Answer
-
Registran la hora del día o "tiempo real".
-
El software para reloj toma generalmente la forma de un manejador de dispositivo, aunque no es un dispositivo de bloque ni de caracter.
-
Promueven que un proceso monopolice la CPU y se ejecute por más tiempo del permitido.
-
Generan interrupciones a la CPU.
-
Mantienen un registro del uso de la CPU y realizan resúmenes, monitoreo y recolección de estadísticas.
Question 28
Question
La ventaja del reloj programable es que puede simular varios relojes virtuales con un único reloj físico.
Answer
- True
- False
Question 29
Question
Las terminales pueden operar con una estructura central de buffers o con buffers exclusivos para cada terminal.
Answer
- True
- False
Want to create your own Quizzes for free with GoConqr? Learn more.