14617666
Beschreibung
Mindmap von Angie Urrego, aktualisiert more than 1 year ago
|
|
Erstellt von Angie Urrego
vor mehr als 6 Jahre
|
|
Sistema Robótico de
Cirugía Da Vinci
Anmerkungen:
- Entre sus características: 1)Visión 3D HD, 2) Movimiento intutitivo, 3) Instrumentación Endowrist, 4) Consola con opciones especiales ergonómicas
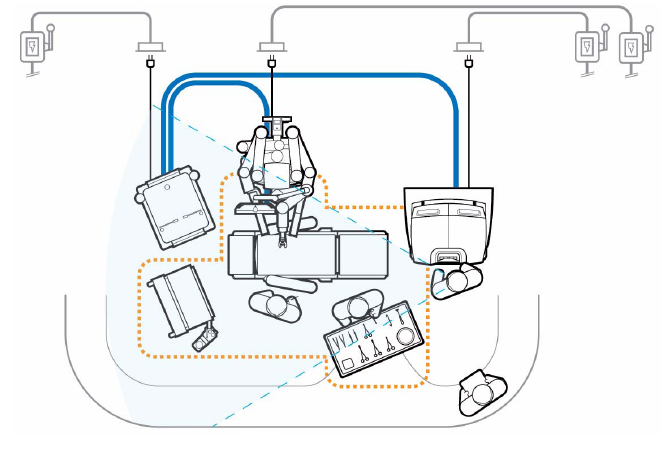
- Componentes principales
- Consola del cirujano
Anmerkungen:
- Desde aquí el cirujano toma el control del sistema y los brazos robóticos. Además tiene un touchpad.
- Simula la alineación
natural ojo-mano
- Brinda la misma
destreza que se tendría
durante una Cirugía
abierta
- Reduce el temblor natural
de la mano y los
movimientos inadvertidos
- Sus componentes son
- Panel de control izquierdo
Anmerkungen:
- Para la configuración ergonómica de cada cirujano Stereo viewer height: altura de visualizador Armrest height: altura del soporte de descanso de los brazos Footswitch panel depth: profundidad lugar para los pies Stereo viewer tilt: inclinación del visualizador
- Visualizador estéreo 3D
- Panel de control derecho
Anmerkungen:
- Botón de encendido/apagado y botón de emergencia, que detiene la conexión consola- carro paciente
- Footswich control
Anmerkungen:
- Permite intercambiar los controles de lo que el cirujano está controlando
- Controladores principales
- Touchpad
- Panel de control izquierdo
- Carro paciente
Anmerkungen:
- Tiene 4 brazos robóticos. 3 de los 4 brazos manipulan los instrumentos quirúrgicos y el 4 brazo maneja el endoscopio.
- Juntas de montaje
Anmerkungen:
- Establecen el centro distancia en donde se manipulan los instrumentos
- Brazos del robot
- Brazo de la cámara
- Unidad
motorizada
- Carro visión
Anmerkungen:
- Es el cerebro del sistema, con múltiples procesadores. Además un monitor, una cámara 3D HD, un iluminador y sensor RFID
- Cámara 3D HD
- Endoscopio
de 12mm de
0° y 30°
- Monitor de
pantalla táctil
- Iluminador
- Unidades de control
de la cámara
- Transformador de aislación
- Ajustes de sonido
- Fuentes de entrada
- Tank Holder
Anmerkungen:
- Para ajustar una bala en el sistema
- Consola del cirujano
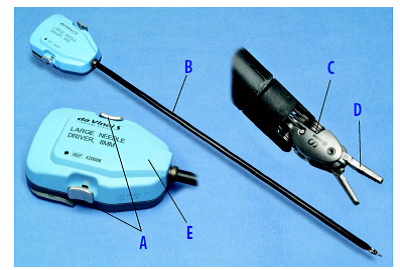
- Instrumentos Endowrist
Anmerkungen:
- Permiten una amplitud de movimiento de 540° con 7 grados: inserción, inclinación externa, desviación externa, giro, agarre. Permiten movimientos contraintuitivos.
- Partes
- A=Palancas de liberación
- B= Eje
- C= Muñeca
- E= Carcasa del instrumento
- D= Punta
- A=Palancas de liberación
- Tamaños
- 8mm
- Generalmente
con 10 vidas
- Generalmente
con 10 vidas
- 5mm
- Generalmente
con 20 vidas
- Generalmente
con 20 vidas
- Aplicadores de grapas= 100 disparos
- 8mm
- Ubicación
- Puede variar según el
espacio de la sala
- Puede variar según el
espacio de la sala
- Movimiento de los brazos
- Botón de ambrague
Anmerkungen:
- Para inserción de instrumento/cámara
- Botón de puerto
Anmerkungen:
- Movimiento de la articulación vertical y horizontalmente
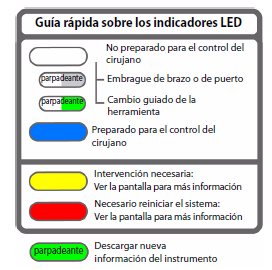
- Indicadores LED
- Botón de ambrague
- Recomendación
- El carro del paciente y la consola
del cirujano, deben estar las 24
horas del día conectadas al toma
corriente, para garantizar la caraga
de la batería
- El carro del paciente y la consola
del cirujano, deben estar las 24
horas del día conectadas al toma
corriente, para garantizar la caraga
de la batería
- Lavado
- El lavado del instrumental
EndoWrist en la FSFB se
realiza en Lavadora
termodesinfectora
- En lavadoras
termodesinfectoras
BELIMED, existe un ciclo
especial y un carro
especial para el lavado de
estas piezas, denominado
"P04 DAVINCI"
- Las piezas se esterilizan en
Plasma peróxido de
hidrógeno, en un ciclo
especial
- En el STERRAD 100 NX, este ciclo espeicial
se denomina: "EXPRESS"
- El ciclo EXPRESS tiene una
duración de 24 minutos
- El ciclo EXPRESS tiene una
duración de 24 minutos
- En el STERRAD 100 NX, este ciclo espeicial
se denomina: "EXPRESS"
- Las piezas se esterilizan en
Plasma peróxido de
hidrógeno, en un ciclo
especial
- En lavadoras
termodesinfectoras
BELIMED, existe un ciclo
especial y un carro
especial para el lavado de
estas piezas, denominado
"P04 DAVINCI"
- El lavado del instrumental
EndoWrist en la FSFB se
realiza en Lavadora
termodesinfectora
Medienanhänge
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Möchten Sie kostenlos Ihre eigenen Mindmaps mit GoConqr erstellen? Mehr erfahren.