18977072
Beschreibung
Mindmap von Camilo Forero, aktualisiert more than 1 year ago
|
|
Erstellt von Camilo Forero
vor mehr als 5 Jahre
|
|
Robotica NXT
- Introducción
- CONSTRUIR:Construya su robot.
En esta guía del usuario se
proporcionan instrucciones
específicas para construir un
robot.
- Programar Programe su robot
utilizando el software LEGO
MINDSTORMS Education NXT
- Poner a prueba Ejecute su
programa. ¿Qué ocurre? ¿Su
robot actuó como lo
esperaba? Si no lo hizo
- Menú principal del NXT
- Programa NXT
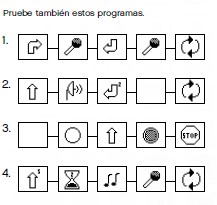
- No necesita un ordenador para programar un robot. Puede crear muchos
programas sin su ordenador, utilizando el submenú Programa del NXT [NXT
Program]. Pruebe este programa para ver lo fácil que es. Haga que el robot
retroceda y avance cuando se presiona el sensor táctil.
- No necesita un ordenador para programar un robot. Puede crear muchos
programas sin su ordenador, utilizando el submenú Programa del NXT [NXT
Program]. Pruebe este programa para ver lo fácil que es. Haga que el robot
retroceda y avance cuando se presiona el sensor táctil.
- Programa NXT
- CONSTRUIR:Construya su robot.
En esta guía del usuario se
proporcionan instrucciones
específicas para construir un
robot.
- Tecnología
- Ladrillo NXT El NXT, un ladrillo inteligente de LEGO®
controlado por ordenador, es el cerebro del robot de
LEGO MINDSTORMS® Educatio
- Sensores táctiles Le
permiten al robot
responder a obstáculos
en el entorno
- Sensor acústico Le permite al
robot responder a los niveles
de sonido
- Sensor fotosensible Le
permite al robot responder a
las variaciones del nivel de
luz y de color.
- Sensor ultrasónico Le
permite al robot medir
la distancia hacia un
objeto y responder al
movimiento.
- Ladrillo NXT El NXT, un ladrillo inteligente de LEGO®
controlado por ordenador, es el cerebro del robot de
LEGO MINDSTORMS® Educatio
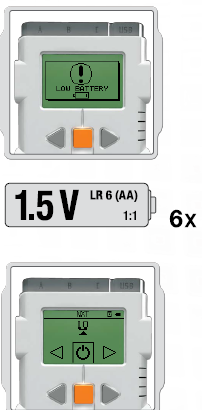
- Instalación de las baterías en el NXT
- Batería recargable La batería recargable encaja en
la parte inferior del NXT. Para instalar la batería
recargable, mueva la pestaña de plástico del lado
con su pulgar para abrir la parte trasera.
- • La luz indicadora verde se enciende cuando el
adaptador de corriente está conectado al NXT. •
La luz roja se enciende cuando la batería se está
cargando. La luz roja se apaga cuando la batería
tiene la carga completa. • Cargar la batería por
completo requiere aproximadamente cuatro
horas. • Puede utilizarse el NXT cuando se está
cargando la batería. Sin embargo, de ese modo
la carga requiere más tiempo. • Esta batería de
polímero de iones de litio puede recargarse
hasta 500 veces.
- • La luz indicadora verde se enciende cuando el
adaptador de corriente está conectado al NXT. •
La luz roja se enciende cuando la batería se está
cargando. La luz roja se apaga cuando la batería
tiene la carga completa. • Cargar la batería por
completo requiere aproximadamente cuatro
horas. • Puede utilizarse el NXT cuando se está
cargando la batería. Sin embargo, de ese modo
la carga requiere más tiempo. • Esta batería de
polímero de iones de litio puede recargarse
hasta 500 veces.
- Batería recargable La batería recargable encaja en
la parte inferior del NXT. Para instalar la batería
recargable, mueva la pestaña de plástico del lado
con su pulgar para abrir la parte trasera.
- Conexión de la tecnología NXT
- Conexión de los motores Para conectar un motor al
NXT, conecte un extremo de un cable negro al
motor. Conecte el otro extremo a uno de los puertos
de salida (A, B o C).
- Conexión de los sensores Para conectar un
sensor al NXT, conecte un extremo de un cable
negro al sensor. Conecte el otro extremo a uno de
los puertos de entrada (1, 2, 3 o 4).
- Carga y descarga de archivos El puerto USB y
el Bluetooth inalámbrico se utilizan para
cargar y descargar datos entre su ordenador
y el NXT.
- Conexión de los motores Para conectar un motor al
NXT, conecte un extremo de un cable negro al
motor. Conecte el otro extremo a uno de los puertos
de salida (A, B o C).
- Acerca del ladrillo NXT
- Interfaz del NXT El ladrillo NXT es el cerebro del
robot de LEGO® MINDSTORMS® Education. Es
un ladrillo de LEGO controlado por ordenador
que aporta un comportamiento programable,
inteligente y de toma de decisiones.
- Puertos de salida El NXT dispone de tres puertos
de salida con las etiquetas A, B y C para motores o
lámparas.
- Icono Bluetooth El icono Bluetooth muestra
el estado actual de las conexiones
inalámbricas Bluetooth. Si no se visualiza el
icono Bluetooth, el Bluetooth está
desactivado
- Interfaz del NXT El ladrillo NXT es el cerebro del
robot de LEGO® MINDSTORMS® Education. Es
un ladrillo de LEGO controlado por ordenador
que aporta un comportamiento programable,
inteligente y de toma de decisiones.
- JuanCamiloForero -
Camilo Espinosa
- Sensor táctil
- Sugerencias de uso Puede agregar el sensor
táctil a un modelo NXT y luego programar el
comportamiento del modelo para que cambie
cuando se presiona o se libera el sensor táctil.
- Pruébeme Utilice el programa adecuado
en el submenú Pruébeme (consulte la
página 17) para ver rápidamente cómo
funciona.
- Programa de NXT También puede utilizar la función
Programa [Program] para crear programas directamente en
el NXT sin utilizar un ordenador. Consulte la sección
Programa en la páginas 15-16.
- 27 Sensor táctil Tecnología Pruébeme Utilice el programa adecuado en el submenú Pruébeme (consulte la página 17) para
ver rápidamente cómo funciona. Programa de NXT También puede utilizar la función Programa [Program] para crear
programas directamente en el NXT sin utilizar un ordenador. Consulte la sección Programa en la páginas 15-16. Registro de
datos de NXT Utiliza la función Registro de datos de NXT [NXT Datalog] para crear archivos de registro de datos en el NXT
sin utilizar un ordenador. Consulta Registro de datos de NXT en las páginas 18-19.
- Sugerencias de uso Puede agregar el sensor
táctil a un modelo NXT y luego programar el
comportamiento del modelo para que cambie
cuando se presiona o se libera el sensor táctil.
- 34 1 2 3 4 Servomotor
interactivo
- Sensor de rotación integrado Todos los servomotores interactivos disponen de un sensor
de rotación integrado. La retroacción rotacional le permite al NXT controlar los
movimientos de forma muy precisa. El sensor de rotación integrado mide las rotaciones
del motor en grados (precisión de +/- un grado) o en rotaciones completas
- Sugerencias de uso El sensor de rotación integrado en cada motor junto con
la configuración de potencia de los bloques Desplazar y Motor en el
software (consulte las páginas 56 a 58) le permiten programar diferentes
velocidades para los motores y mover el robot con precisión
- 35 Servomotor interactivo Tecnología Pruébeme Utilice el programa
adecuado en el submenú Pruébeme (consulte la página 17) para ver
rápidamente cómo funciona
- Programa de NXT También puede utilizar la función Programa [Program] para crear programas
directamente en el NXT sin utilizar un ordenador. Consulte la sección Programa en la páginas
15-16.
- Registro de datos de NXT Utiliza la función Registro de datos de NXT [NXT Datalog] para crear archivos
de registro de datos en el NXT sin utilizar un ordenador. Consulta Registro de datos de NXT en las
páginas 18-19.
- Sensor de rotación integrado Todos los servomotores interactivos disponen de un sensor
de rotación integrado. La retroacción rotacional le permite al NXT controlar los
movimientos de forma muy precisa. El sensor de rotación integrado mide las rotaciones
del motor en grados (precisión de +/- un grado) o en rotaciones completas
- 36 1 2 3 Lámparas
- Se puede encender y apagar las lámparas, para crear patrones intermitentes de luz.
También pueden utilizarse para activar el sensor fotosensible, para mostrar que un
motor está encendido o para indicar el estado de un sensor. También puede utilizarlas
para darle vitalidad a los “ojos” de su robot u otras funciones
- Se puede encender y apagar las lámparas, para crear patrones intermitentes de luz.
También pueden utilizarse para activar el sensor fotosensible, para mostrar que un
motor está encendido o para indicar el estado de un sensor. También puede utilizarlas
para darle vitalidad a los “ojos” de su robot u otras funciones
Medienanhänge
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Möchten Sie kostenlos Ihre eigenen Mindmaps mit GoConqr erstellen? Mehr erfahren.