20998318
Beschreibung
Mindmap von ANA FERNANDA CARABALI GONZALEZ, aktualisiert more than 1 year ago
|
|
Erstellt von ANA FERNANDA CARABALI GONZALEZ
vor fast 5 Jahre
|
|
UNIDAD 1.ESTATICA-FER
- Estudio de las fuerzas aplicadas a cuerpos en estado de equilibrio
- Temas
- ESTÁTICA DE PARTÍCULAS
- CONCEPTOS FUNDAMENTALES
- ESPACIO
- Posición de la particula
en tres Dimensiones
- Posición de la particula
en tres Dimensiones
- TIEMPO
- Medición de Intervalos
- Medición de Intervalos
- MASA
- Mide la Resistencia de
forma Cuantitativa
- Mide la Resistencia de
forma Cuantitativa
- FUERZA
- Es la Acción sobre un cuerpo, y
se representa por un vector
- Es la Acción sobre un cuerpo, y
se representa por un vector
- 3. LEYES DE NEWTON:
Se refiere al
movimiento de
particulas
- 1 a Ley. Una partícula permanecerá en reposo o se
moverá a velocidad constante si la resultante de las
fuerzas que actúan sobre ella es cero.
- 2 a Ley. Si la resultante de las fuerzas que actúan sobre una
partícula es diferente de cero, la partícula tendrá una aceleración
proporcional a la magnitud de la resultante y en el sentido de esta
- Ḟ=m. ã
- Ḟ=m. ã
- 3 Ley. A toda acción corresponde una reacción de
igual magnitud, pero de sentido contrario.
- SISTEMA DE
UNIDADES
- Existen unidades para medir la longitud, la masa, el
tiempo y la fuerza, para eso se utiliza el Sistema
Internacional de Unidades (SI) o el Sistema Inglés de
Unidades.
- Sistema Internacional de Unidades
- Longitud =m
Masa= Kg
Tiempo=S
Fuerza=N
- Cuando las cantidades
numéricas son demasiado
grandes o pequeñas, se
pueden usar prefijos
- Kilo, Mega, Giga,
Mili, Micro; Nano
- Kilo, Mega, Giga,
Mili, Micro; Nano
- Longitud =m
Masa= Kg
Tiempo=S
Fuerza=N
- CONVERSIÓN DE
UNIDADES
- La conversión de unidades en el mismo sistema
solo consiste en recorrer el punto decimal tres
lugares, ya sea a la izquierda o a la derecha.
- Para las unidades de masa:
1 ton =1 000 kg 1g= 0.001 kg
- Para las unidades de masa:
1 ton =1 000 kg 1g= 0.001 kg
- Cuando la conversión de unidades es de un
sistema a otro, es necesario utilizar los
factores de conversión o equivalencias
- 1 ft= 12 in y 1 in= 25.4 mm=
2.54 cm
- 1 ft= 12 in y 1 in= 25.4 mm=
2.54 cm
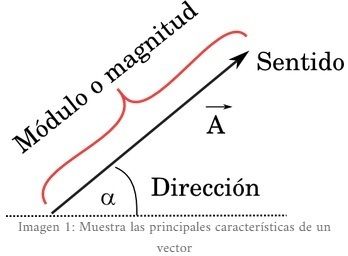
- VECTORES:Es una representación
gráfica y describe una cantidad
física y se conforma por:
- Magnitud:Fuerza,Velocidad
y
Desplazamiento
- Quedan totalmente definidas
con un módulo, una dirección y
un sentido.
- Quedan totalmente definidas
con un módulo, una dirección y
un sentido.
- Origen del Vector:
- Punto de Inicio
- Punto de Inicio
- Dirección:
- Orientación definida por el ángulo que forma el
vector con un eje de referencia del sistema
cartesiano.
- Orientación definida por el ángulo que forma el
vector con un eje de referencia del sistema
cartesiano.
- Sentido:
- Se representa con una flecha situada en un extremo
de la línea, la cual indica hacia dónde se dirige el
vector.
- Se representa con una flecha situada en un extremo
de la línea, la cual indica hacia dónde se dirige el
vector.
- SUMA DE VECTORES
- GRAFICA
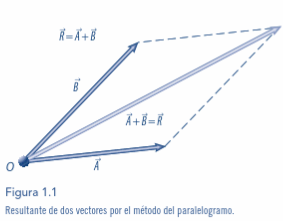
- METODO DEL PARALELOGRAMO
- Se construye un paralelogramo que tenga los vectores como lados y se traza la
diagonal del mismo para obtener el vector suma.
- Se construye un paralelogramo que tenga los vectores como lados y se traza la
diagonal del mismo para obtener el vector suma.
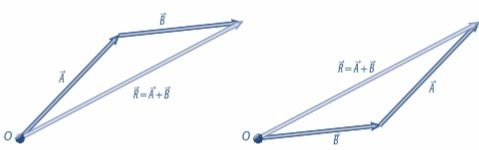
- REGLA DEL TRIANGULO
- consiste en utilizar, de manera indistinta, solo
la mitad del paralelogramo,
- consiste en utilizar, de manera indistinta, solo
la mitad del paralelogramo,
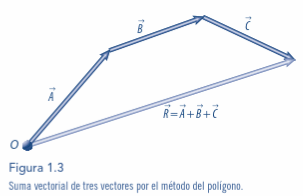
- METODO DEL POLIGONO
- Se utiliza cuando se tienen más de tres
vectores.
- Se utiliza cuando se tienen más de tres
vectores.
- METODO DEL PARALELOGRAMO
- ANALITICA
- Es necesario descomponer cada vector
en sus componentes rectangulares,
mediante la trigonometría o las
proporciones.
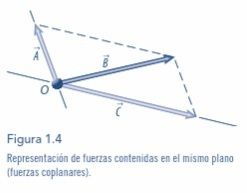
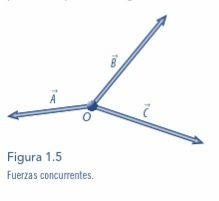
- CONCURRENTES
- COPLANARES
- Es necesario descomponer cada vector
en sus componentes rectangulares,
mediante la trigonometría o las
proporciones.
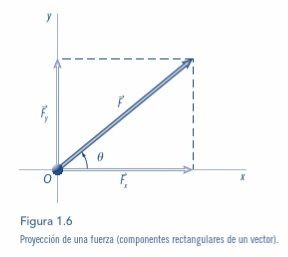
- COMPONENTE RECTANGULAR DE UN VECTOR EN PLANO
- Como la suma de dos o más vectores
origina un vector llamado resultante,
mediante el proceso inverso se obtienen las
componentes rectangulares de un vector o del
vector resultante.
- Las componentes rectangulares se
llaman así porque son
perpendiculares entre sí y forman
un ángulo recto.
- REFERENCIAS BIBLIOGRAFICAS
- Beer, Ferdinand P. y Russell Johnston, E. (2004). Mecánica vectorial para Ingenieros. Estática, 7 a ed.
McGraw-Hill: México. Bedfor, Anthony y Fowler, Wallace L. (1996). Estática. Mecánica para Ingeniería .
Addison Wesley: México. Boresi, Arthur P. y Schmidt, Richard J. (2001). Ingeniería Mecánica . Thomson
Learning: México. Ganem Corvera, Ricardo. (2007). Estática. Las Leyes del equilibrio . Grupo Editorial
Patria: México. Hibbeler, Russel C. (2004). Mecánica vectorial para Ingenieros. Estática , 10 a ed. Pearson:
México. Jaan Kiusalaas, Andrew Pytel. (1999). Ingeniería Mecánica. Estática , 2 a ed. International
Thomson Editores: México. Soutas-Little, Robert W., Inman, Daniel J. y Balint, Daniel S. (2009).
Engineering Mechanics: Dynamics , Cengage Learning: Estados Unidos. Rodríguez, Aguilera, Jacqueline.
Estática, Grupo Editorial Patria, 2014. ProQuest Ebook Central,
http://ebookcentral.proquest.com/lib/unadsp/detail.action?docID=3227234. Created from unadsp on
2020-02-25 07:29:48.
- Beer, Ferdinand P. y Russell Johnston, E. (2004). Mecánica vectorial para Ingenieros. Estática, 7 a ed.
McGraw-Hill: México. Bedfor, Anthony y Fowler, Wallace L. (1996). Estática. Mecánica para Ingeniería .
Addison Wesley: México. Boresi, Arthur P. y Schmidt, Richard J. (2001). Ingeniería Mecánica . Thomson
Learning: México. Ganem Corvera, Ricardo. (2007). Estática. Las Leyes del equilibrio . Grupo Editorial
Patria: México. Hibbeler, Russel C. (2004). Mecánica vectorial para Ingenieros. Estática , 10 a ed. Pearson:
México. Jaan Kiusalaas, Andrew Pytel. (1999). Ingeniería Mecánica. Estática , 2 a ed. International
Thomson Editores: México. Soutas-Little, Robert W., Inman, Daniel J. y Balint, Daniel S. (2009).
Engineering Mechanics: Dynamics , Cengage Learning: Estados Unidos. Rodríguez, Aguilera, Jacqueline.
Estática, Grupo Editorial Patria, 2014. ProQuest Ebook Central,
http://ebookcentral.proquest.com/lib/unadsp/detail.action?docID=3227234. Created from unadsp on
2020-02-25 07:29:48.
- Como la suma de dos o más vectores
origina un vector llamado resultante,
mediante el proceso inverso se obtienen las
componentes rectangulares de un vector o del
vector resultante.
- GRAFICA
- SUMA DE VECTORES
- Magnitud:Fuerza,Velocidad
y
Desplazamiento
- La conversión de unidades en el mismo sistema
solo consiste en recorrer el punto decimal tres
lugares, ya sea a la izquierda o a la derecha.
- Existen unidades para medir la longitud, la masa, el
tiempo y la fuerza, para eso se utiliza el Sistema
Internacional de Unidades (SI) o el Sistema Inglés de
Unidades.
- 1 a Ley. Una partícula permanecerá en reposo o se
moverá a velocidad constante si la resultante de las
fuerzas que actúan sobre ella es cero.
- ESPACIO
- CONCEPTOS FUNDAMENTALES
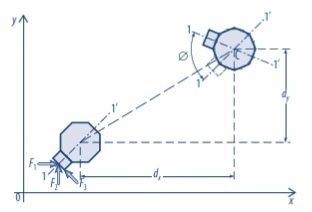
- EQUILIBRIO DE CUERPOS RIGIDOS
- Son los que poseen forma y dimensiones.
- Las fuerzas aplicadas sobre los cuerpos rígidos ocasionan que estos se
desplacen y giren alrededor de un punto o de un eje.
- Las fuerzas F 1 , F 2 y F 3 ocasionan los desplazamientos d x ,
d y , así como un giro G alrededor del eje z , en el plano.
- Las fuerzas F 1 , F 2 y F 3 ocasionan los desplazamientos d x ,
d y , así como un giro G alrededor del eje z , en el plano.
- PRINCIPIO DE TRANSMISIBILIDAD
- Es el que Establece condiciones de equilibrio o
movimiento de un cuerpo rígido.
- Una fuerza F puede ser reemplazada por otra fuerza F’ que tenga
la misma magnitud y sentido, en un distinto punto siempre y
cuando las dos fuerzas tengan la misma línea de acción.
- Una fuerza F puede ser reemplazada por otra fuerza F’ que tenga
la misma magnitud y sentido, en un distinto punto siempre y
cuando las dos fuerzas tengan la misma línea de acción.
- PRODUCTO VECTORIAL
- Es la Operación matemática mediante la cual es
posible multiplicar dos vectores; por lo común, se
le conoce como producto cruz
- PRODUCTO ESCALAR
- Geométricamente, el producto escalar permite
encontrar la dirección entre vectores en el espacio
- MOMENTO DE UNA FUERZA CON RESPETO A UN PUNTO
- Se produce cuando se aplica una fuerza sobre un cuerpo rígido y hace que este
gire; dicho giro se conoce como momento .
- El giro o momento depende del punto de aplicación de la fuerza, su
magnitud, su dirección y su sentido, así como de un punto de
referencia fijo “ O ”.
- MOMENTO DE UN PAR
- Si se tienen dos fuerzas F de igual magnitud y dirección, pero de
sentidos opuestos, aplicadas a una distancia d de un punto O , se
dice que forman un par o un giro
- SISTEMA EQUIVALENTE DE FUERZAS
- Son Dos sistemas de fuerza que actúan sobre el mismo cuerpo rígido son
equivalentes si producen el mismo efecto sobre el mismo punto
- Para su cálculo es necesario emplear las ecuaciones de
equilibrio que se utilizaron antes para describir la
estática de la partícula en el plano:
- EQUILIBRIO DE UN CUERPO RIGIDO EN EL PLANO
- La resultante de todas las fuerzas aplicadas sea nula y que el momento
resultante tomado respecto de un punto cualquiera sea nulo
- ECUACIONES
- EQUILIBRIO DE UN CUERPO RIGIDO EN EL ESPACIO
- Cuando un cuerpo esta sometido a un sistema de fuerzas,
que la resultante de todas las fuerzas y el momento
resultante sean cero, entonces el cuerpo está en equilibrio
- REFERENCIAS BIBLIOGRAFICAS
- Beer, Ferdinand y E. Russell, Johnston. (2004). Mecánica vectorial para ingenieros.
Estática , 7 a ed., McGraw-Hill: México. Bedfor, Anthony y L. Fowler, Wallace. (1996).
Mecánica para ingeniería. Estática . Pearson: México. Hibbeler, Russel. (2010).
Mecánica vectorial para ingenieros. Estática, 12 a ed. Pearson: México. Murrieta
Necoecher, Antonio, Bacelis Esteva, Ramón y Mora González, Fidel. (1972).
Aplicaciones de la estática . 2 a ed. Limusa: México. Pytel, Andrew y Kiusalaas, Jaan.
(1999). Ingeniería mecánica Estática . 2 a ed. Thomson editores: México. Rodríguez,
Aguilera, Jacqueline. Estática, Grupo Editorial Patria, 2014. ProQuest Ebook Central,
http://ebookcentral.proquest.com/lib/unadsp/detail.action?docID=3227234.
Created from unadsp on 2020-02-25 09:11:10.
- Beer, Ferdinand y E. Russell, Johnston. (2004). Mecánica vectorial para ingenieros.
Estática , 7 a ed., McGraw-Hill: México. Bedfor, Anthony y L. Fowler, Wallace. (1996).
Mecánica para ingeniería. Estática . Pearson: México. Hibbeler, Russel. (2010).
Mecánica vectorial para ingenieros. Estática, 12 a ed. Pearson: México. Murrieta
Necoecher, Antonio, Bacelis Esteva, Ramón y Mora González, Fidel. (1972).
Aplicaciones de la estática . 2 a ed. Limusa: México. Pytel, Andrew y Kiusalaas, Jaan.
(1999). Ingeniería mecánica Estática . 2 a ed. Thomson editores: México. Rodríguez,
Aguilera, Jacqueline. Estática, Grupo Editorial Patria, 2014. ProQuest Ebook Central,
http://ebookcentral.proquest.com/lib/unadsp/detail.action?docID=3227234.
Created from unadsp on 2020-02-25 09:11:10.
- Cuando un cuerpo esta sometido a un sistema de fuerzas,
que la resultante de todas las fuerzas y el momento
resultante sean cero, entonces el cuerpo está en equilibrio
- La resultante de todas las fuerzas aplicadas sea nula y que el momento
resultante tomado respecto de un punto cualquiera sea nulo
- Son Dos sistemas de fuerza que actúan sobre el mismo cuerpo rígido son
equivalentes si producen el mismo efecto sobre el mismo punto
- Si se tienen dos fuerzas F de igual magnitud y dirección, pero de
sentidos opuestos, aplicadas a una distancia d de un punto O , se
dice que forman un par o un giro
- Se produce cuando se aplica una fuerza sobre un cuerpo rígido y hace que este
gire; dicho giro se conoce como momento .
- Geométricamente, el producto escalar permite
encontrar la dirección entre vectores en el espacio
- El resultado del producto vectorial entre dos vectores que
se encuentran contenidos en un plano es otro vector
perpendicular a dicho plano,= vector ortogonal al plano
- Es la Operación matemática mediante la cual es
posible multiplicar dos vectores; por lo común, se
le conoce como producto cruz
- Es el que Establece condiciones de equilibrio o
movimiento de un cuerpo rígido.
- Son los que poseen forma y dimensiones.
- ESTÁTICA DE PARTÍCULAS
- Temas
- BY:ANA FERNANDA CARABALI GONZALEZ
CURSO: ESTATICA Y R.DE M. GRUPO# 38
Medienanhänge
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Möchten Sie kostenlos Ihre eigenen Mindmaps mit GoConqr erstellen? Mehr erfahren.