29021116
Mars
Exploration
- Main Mission
Objectives
- Follow the Path
- Possible Solution
- Use the colour sensor to detect the black path and white
foreground then use the data to move both motors alternately
- Use the colour sensor to detect the black path and white
foreground then use the data to move both motors alternately
- Requirements
- Colour Sensor (reflected
light), Large Left Motor, Large
Right Motor
- Colour Sensor (reflected
light), Large Left Motor, Large
Right Motor
- Description
- The EV3 need to be able to traverse the track
(as seen below) and has to follow the set
path which includes; sharp turns, long curvy
bends and etc.
- The EV3 need to be able to traverse the track
(as seen below) and has to follow the set
path which includes; sharp turns, long curvy
bends and etc.
- Possible Solution
- Navigate Around
Objects
- Description
- Using both the touch sensor and ultrasonic sensor determine if an
object is moveable if they follow the criteria; If the object is in front
of the EV3, If the touch sensor is pressed. If they are met then the
object is moveable and the code resumes, If not then the EV3
needs to move around the object then It needs to resume the line
following algorithm
- Using both the touch sensor and ultrasonic sensor determine if an
object is moveable if they follow the criteria; If the object is in front
of the EV3, If the touch sensor is pressed. If they are met then the
object is moveable and the code resumes, If not then the EV3
needs to move around the object then It needs to resume the line
following algorithm
- Possible Solution
- The EV3 needs to detect both the included
moveable and immovable object and take
the correct course of action, while
retaining the line following
- The EV3 needs to detect both the included
moveable and immovable object and take
the correct course of action, while
retaining the line following
- Requirements
- Colour Sensor (reflected light), Large
Left Motor, Large Right Motor and
Touch Sensor with spike Ultrasonic
sensor
- Colour Sensor (reflected light), Large
Left Motor, Large Right Motor and
Touch Sensor with spike Ultrasonic
sensor
- Description
- Follow the Path
- Extension Mission
Objective
- Celebration
Dance
- Description
- The EV3 will need to perform a dance once
it has completed both ends of the track.
However before the dance starts the EV3
must interpret information that
communicates the course is over.
- The EV3 will need to perform a dance once
it has completed both ends of the track.
However before the dance starts the EV3
must interpret information that
communicates the course is over.
- Possible
Solution
- Have a loop statement that limits the amount of
times that the code runs, then implements a
dance using the arm motor and single motor
movement on the EV3
- Have a loop statement that limits the amount of
times that the code runs, then implements a
dance using the arm motor and single motor
movement on the EV3
- Requirements
- Left Large Motor
Right Large Motor
Arm Medium Motor
- Left Large Motor
Right Large Motor
Arm Medium Motor
- Description
- Complete the full
path
- Description
- The EV3 needs to move through the track,
then when it arrives at the green circle it has
to redo the course in the opposite directions.
- The EV3 needs to move through the track,
then when it arrives at the green circle it has
to redo the course in the opposite directions.
- Possible
Solution
- Reconfigure the line following code
so that it can function at both start
areas and is able to handle the
obstacles in both directions
- Reconfigure the line following code
so that it can function at both start
areas and is able to handle the
obstacles in both directions
- Requirements
- Colour Sensor (reflected light), Large Left Motor,
Large Right Motor, Touch Sensor with spike
Ultrasonic sensor
- Colour Sensor (reflected light), Large Left Motor,
Large Right Motor, Touch Sensor with spike
Ultrasonic sensor
- Description
- Celebration
Dance
- Elements to the Project
- EV3 Components
- Motor
- Large
- Description
- A motor that runs at around 160-170 RPM and has a torque of 20Ncm (newton
centimetre) therefore being a motor generating more force but at a lower speed.
It also contains a built-in rotation sensor that optimised for precision controls on
the EV3
- A motor that runs at around 160-170 RPM and has a torque of 20Ncm (newton
centimetre) therefore being a motor generating more force but at a lower speed.
It also contains a built-in rotation sensor that optimised for precision controls on
the EV3
- Use Case in the Project
- Celebration Dance, The
Line Following, Obstacle
Avoidance and Object
detection
- Celebration Dance, The
Line Following, Obstacle
Avoidance and Object
detection
- Constraits
- Only 2 Large Motors are allowed and
are only allowed for the wheels
- Only 2 Large Motors are allowed and
are only allowed for the wheels
- Description
- Medium
- Constraints
- Only 1 medium Motors
are allowed and they
are only allowed for
the arm.
- Only 1 medium Motors
are allowed and they
are only allowed for
the arm.
- Description
- The medium motor has a torque of 8Ncm (newton
centimetre) and a RPM of 240-250, meaning it
generates more speed but at the cost of force. It
also contains a built-in rotation sensor that
optimised for precision controls on the EV3
however, due to the smaller size it is able to react
more quickly.
- The medium motor has a torque of 8Ncm (newton
centimetre) and a RPM of 240-250, meaning it
generates more speed but at the cost of force. It
also contains a built-in rotation sensor that
optimised for precision controls on the EV3
however, due to the smaller size it is able to react
more quickly.
- Use Case in the Project
- Celebration
Dance
- Celebration
Dance
- Constraints
- Large
- Sensor
- Colour Sensor
- Description
- The Colour Sensor has 3 option
changing the use case of itself
and those are:
- Reflected light intensity – In Reflected light
intensity mode, the colour sensor discharges a
red light and then measures the amount of light
reflected back from the surface its on. The
intensity is measured through percentage with
0% being dark and 100% being bright
- Ambient light intensity – In this mode,
the colour sensor detects the amount
of light in its environment.
- Colour – In the colour mode, the colour sensor can
detect up to seven different colours: black, blue,
green, yellow, red, white, and brown. This then is
shown through the means of a unique value.
- Reflected light intensity – In Reflected light
intensity mode, the colour sensor discharges a
red light and then measures the amount of light
reflected back from the surface its on. The
intensity is measured through percentage with
0% being dark and 100% being bright
- The Colour Sensor has 3 option
changing the use case of itself
and those are:
- Use Case In Project
- Line
Following
- Line
Following
- Constraints
- Only 1 colour
sensor is allowed
- Only 1 colour
sensor is allowed
- Description
- Touch Sensor
- Description
- The touch sensor gives your robot a sense
of touch. The touch sensor detects when it
is being pressed or released.
- The touch sensor gives your robot a sense
of touch. The touch sensor detects when it
is being pressed or released.
- Use Case in Project
- Obstacle avoidance, Object detection and
Celebration Dance
- Obstacle avoidance, Object detection and
Celebration Dance
- Constraints
- There can only be one touch sensor on the EV3
without the additional spike bit
- There can only be one touch sensor on the EV3
without the additional spike bit
- Description
- Ultra Sonic
- Constraints
- There can only be one Ultrasonic sensor on the
EV3
- There can only be one Ultrasonic sensor on the
EV3
- Used Case in
Project
- Object Avoidance and Object
detection
- Object Avoidance and Object
detection
- Description
- The Ultrasonic Sensor is able to transmit and detect
ultrasonic waves as far as 255cm or 10 inches due to
waves then bouncing back a result the EV3 is able to
detect nearby objects or receive ultra sonic sounds
from other EV3.
- The Ultrasonic Sensor is able to transmit and detect
ultrasonic waves as far as 255cm or 10 inches due to
waves then bouncing back a result the EV3 is able to
detect nearby objects or receive ultra sonic sounds
from other EV3.
- Constraints
- Colour Sensor
- Motor
- Coding Elements
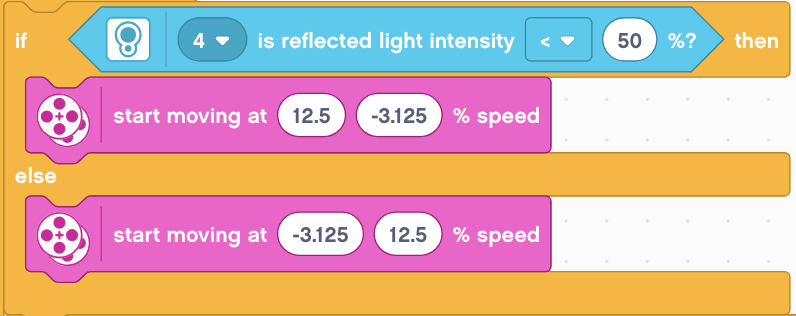
- Line
Following
- Require Code
Blocks
- Is the PT value </>/= than ___ is
an important part towards the
line following algorithm since it
helps differentiate between the
black white values
- The Start moving at ___ , ___ % is
important for the line following code
since sets the speeds the large Motors
move at and especially in the set
course which has sharp turns and
curvy bends.
- Forever Loops are require for the
line following code because it
allows the code to loop forever
meaning it can around the course
back and forth without stopping
- The If Else statement aids in
line following since it
interprets the data from the
colour sensor and picks the
best option out of the 2 option
it was programmed with.
- Is the PT value </>/= than ___ is
an important part towards the
line following algorithm since it
helps differentiate between the
black white values
- Sample
Code
- Require Code
Blocks
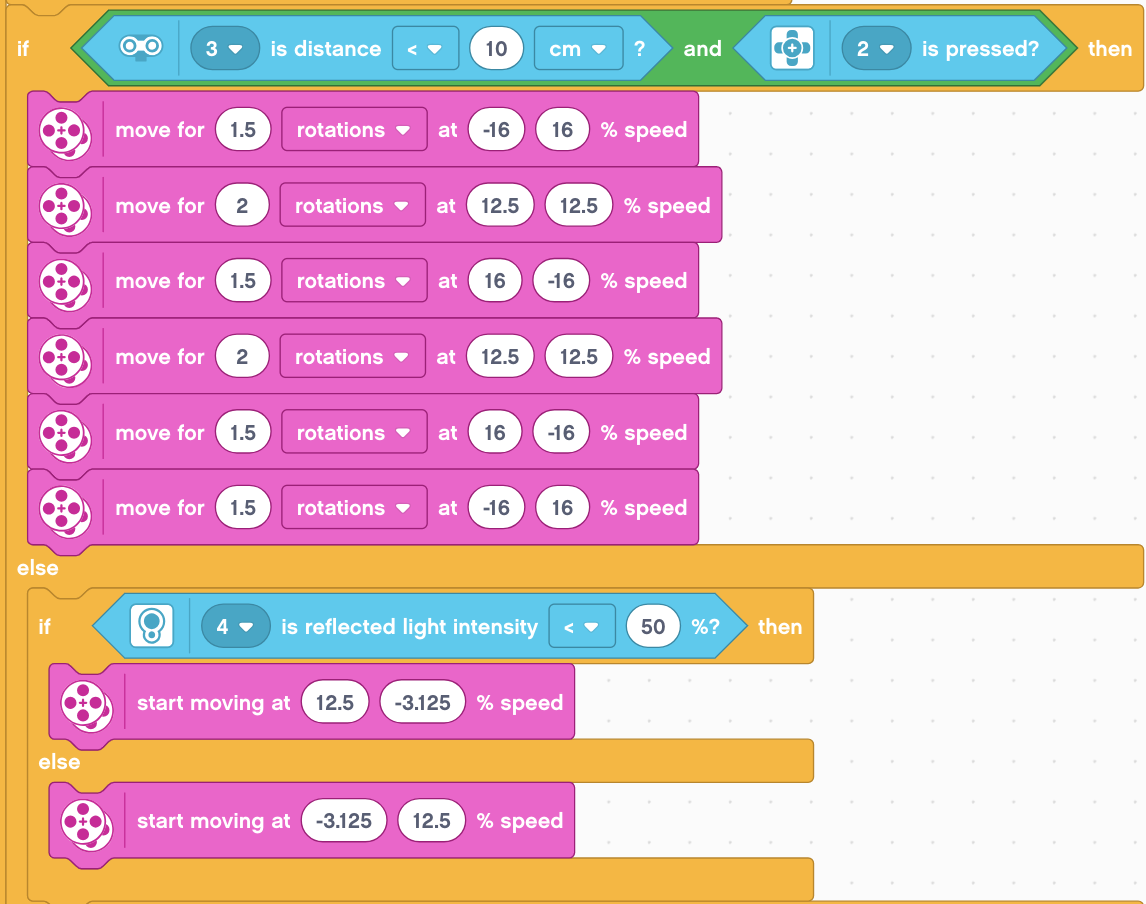
- Object avoidance/detection
- Required Code Blocks
- Forever Loops are required for the line following code because it
allows the code to loop forever meaning it can the detect objects
continuously through the course and when an object is detected it
takes the right course of action
- The If Else statement aids in line following since it interprets the
data from the touch and ultra sonic sensor and determine wether
to continue through the path or move around it.
- Forever Loops are required for the line following code
because it allows the code to loop forever meaning it can the
detect objects continuously through the course and when an
object is detected it takes the right course of action
- ___ and ___ variable state the requirements for to the if option within
the if else statement therefore giving allowing for a more rigid code
- If the ultrasonic sensor detects an object from ___ cm is one out of 2
variable inside the if else statement this is essential for initially
detecting the
- Is __ touched? is the 2nd variable and determine if an object is
moveable since there is a force threshold before it detects being
pressed
- Forever Loops are required for the line following code because it
allows the code to loop forever meaning it can the detect objects
continuously through the course and when an object is detected it
takes the right course of action
- Sample Code
- Required Code Blocks
- Celebration
Dance
- Required Code
Blocks
- The If Statement is essential since it determines
when to do the celebration dance. Therefore
preventing the possibility of it starting during the
course traversal
- Move Motor__ for ___ rotations/Seconds/Degrees is
essential since it allows for movement for one certain
motor in our case the medium one, this then
prevents the EV3 from leaving the set bounds of the
map EV3
- Play Beep at ___ is important since its the easiest block to program music for
but, it also allows for the most freedom.
- The If Statement is essential since it determines
when to do the celebration dance. Therefore
preventing the possibility of it starting during the
course traversal
- Sample
Code
- Required Code
Blocks
- Line
Following
- EV3 Components
- Constraints
- Has to be completed within 4
weeks
- Has to achieve the primary
Goals
- Has to achieve through the education build of the
EV3
- Has to use the EV3
Software
- A sample Algorithm must be provided
- Has to be completed within 4
weeks
Medienanhänge
{kind=link}
{kind=link}
{kind=link}
Möchten Sie kostenlos Ihre eigenen Mindmaps mit GoConqr erstellen? Mehr erfahren.