4733852
Beschreibung
Karteikarten von pelsin pelsin, aktualisiert more than 1 year ago
|
|
Erstellt von pelsin pelsin
vor fast 9 Jahre
|
|
| Frage | Antworten |
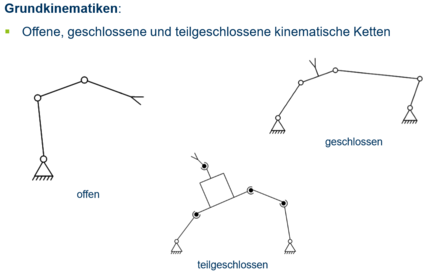
| 1. Skizzieren und benennen Sie die verschiedenen Arten von kinematischen Ketten? Worunter fallen die seriellen bzw. parallelen Roboter? | |
| 2. Wie unterscheiden sich serielle und parallele Kinematiken hinsichtlich ihrer bewegten Massen, ihrer Steifigkeit und dem Arbeitsraum | seriell Kinematik T-T-T Arbeitsraum: Kasten parallele Kinemtaik R-R-R Arbeitsraum: Rund Holländ. Käse |
| 3. Was versteht man unter einer redundanten kinematischen Kette? | Anzahl der Gelenke entspricht Anzahl der Freiheitsgrade |
| 4. Was versteht man unter der Pose eines Roboters? | Industrieroboter beschreiben Posen (Position und Orientierung) im Arbeitsbereich mit verschiedenen Koordinatensystemen - Bezugskoordinatensysteme und Körperkoordinatensysteme -Ortsfest oder variabel |
| 5. Welche Koordinatensysteme werden bei einem Industrieroboter unterschieden? | 1.Achsspezifische Roboterkoordinaten 2.Roboterbasiskoordinaten Weltkoordinaten 3.Werkzeug-/EffektorKoordinaten |
| 6. Wofür steht die Abkürzung TCP bei Industrierobotern? Was ist hiermit gemeint? | Tool Center Point (TCP) |
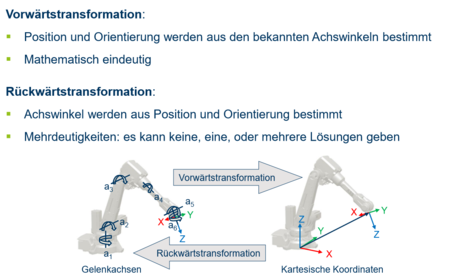
| 7. Was versteht man unter der Vorwärtstransformation bzw. Rückwärtstransformation? | |
| 8. Nach welcher bekannten Konvention kann die Lage zweier Koordinatensysteme zueinander zur Berechnung der Vorwärtskinematik beschrieben werden? Wie viele Parameter werden hier verwendet? Benennen Sie diese Parameter. | Denavit-Hartenberg-Konvention Parameter (Teta-i , di, ai , alpha- i) |
| 9. Nennen Sie Standardbewegungsbefehle bei Industrierobotern. Erläutern Sie die Bewegungsbefehle PTP (2 Arten) und LIN bei der Programmierung von Industrierobotern. Welche Risiken und Vorteile birgt der PTP - Befehl in sich? | aufwenig |
| 10. Worin unterscheiden sich die Wiederhol- und Absolutgenauigkeit? | Wiederholgenauigkeit: Durchschnittliche Abweichung zwischen den Istposen bei wiederholtem Anfahren einer Sollpose |
| 10. Arbeitsgenauigkeit | Absolutgenauigkeit: Abweichung zwischen der Sollpose und dem Mittelwert der Istposen bezogen auf das Basiskoordinatensystem (absolut) |
| 11. Nennen Sie Einflussfaktoren auf die Posegenauigkeit von Industrierobotern | Konstruktionssteifigkeit: statisch Steuerung: Transformationsgenauigkeit Getriebe: Übersetzung Sensorik: Genauigkeit |
| 12. Nach welchen Kategorien lassen sich Wegmesssysteme einteilen? | -Messgrößenabnahme -Messwerterfassung -Ankopplung der Messwerterfassung -Messverfahren -Art des Messprinzips |
| 13. Nennen Sie Arten von Messprinzipien bei Wegmesssystemen | -Elektromechanisch -Induktiv -Elektromagnetisch -Halleffekt |
{kind=link}
{kind=link}
Möchten Sie mit GoConqr kostenlos Ihre eigenen Karteikarten erstellen? Mehr erfahren.