20644825
Description
Flashcards by Pascal Gerster, updated more than 1 year ago
|
|
Created by Pascal Gerster
almost 5 years ago
|
|
| Question | Answer |
| Definiere Freiheitsgrade | Anzahl der potenziell unabhängigen Bewegungen (wie Drehung,Translation) eines Körpers in Bezug auf ein bestimmtes Bezugssystem. |
| Wie viele Freiheitsgrade hat die Schulter? | 3 Freiheitsgrade - nach vorne und zurück - seitwärts hoch und runter - drehen |
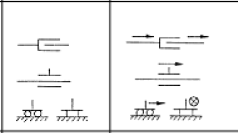
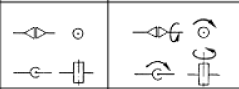
| - Zeichne Translation-Achse fluchtend (Teleskop) - Zeichne Translation-Achse nicht fluchten - Zeichne Verfahren-Achse | |
| - Zeichne Rotation-Achse fluchtend - Zeichne Rotation-Achse nicht fluchtend | |
| - Zeichne Werkzeug Symbol - Zeichne Greifer Symbol | |
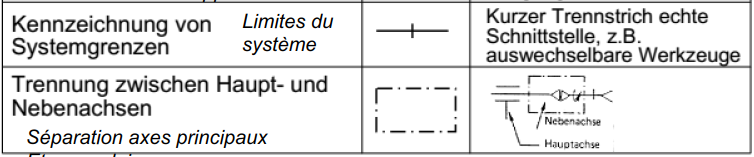
| Kennzeichen von Systemgrenzen und Trennung zwischen haupt und Nebenachse Zeichnen | |
| Wie sieht der Arbeitsbereich eines Kartesischer Roboter aus? und wie Viele Freiheitsgrade hat er? | Der Arbeitsbereich ist ein Quader er hat 3 Freiheitsgrade (X-, Y-, Z- Achse) |
| Beispiele für Kartesischer Roboter | -CNC - Stickmaschine - Pick and Place - 3D Drucker - Laserschneider |
| Vorteile eines Kartesischen Roboter | - überall gleich Präzise - hohe Stabilität - Im vergleich zu anderen Roboter großer Arbeitsbereich - einfach zu Programmieren - günstig - Hohe Steifigkeit in vertikaler Richtung |
| Nachteile eines Kartesischen Roboter | - Platz aufwendig (Achsenlänge) - Niedrige Arbeitsgeschwindigkeit - Großer Kollision-raum - Limitierte Bewegungsfreiheit |
| nenne alle Kenngrössen | Geometrie: • Mechanische Systemgrösse • Bewegungsraum, Arbeitsraum Kinematik : • Geschwindigkeit • Beschleunigung • Überschwingen • Zykluszeit Belastung: • Nennlast = Werkzeuglast + Nutzlast • Werkzeuglast = Last des Armes • Nutzlast = Last des Transport • Maximal last • Nennmoment |
| Wozu dienen die Haupt-Achsen? und wozu dienen die Neben-Achsen? | Die Hauptachsen dienen im Wesentlichen dazu, die Position Anzufahren. Die Nebenachsen dienen zur Orientierung des Werkstücks bzw. des Werkzeuges im Raum. |
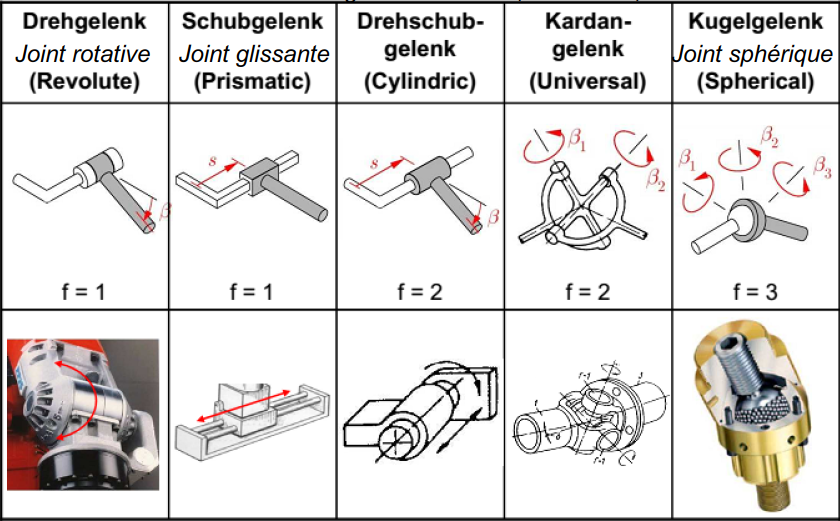
| Verschiedene Gelenke Aufzählen |
Image:
Gelenk (binary/octet-stream)
|
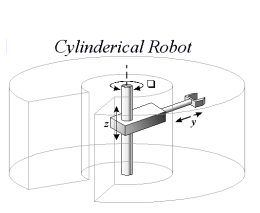
| Wie viele Freiheitsgrade hat der Zylindrische Roboter? |
1-2 in Rotation
2 in Translation (hoch/runter, rein/raus)
Image:
Zyl (binary/octet-stream)
|
| Beispiele zylindrischer Roboter | - Autoparking-Roboter - Werkzeugbestückung - Lager Archivierung - Jukebox - Pick and place (P&P) |
| Vorteile Zylindrischer Roboter | - Hohe Winkelgeschwindigkeit - Einfacher Aufbau |
| Nachteile Zylindrischer Roboter | - Auflösung nicht konstant - geringe Auflösung - Tot-Zonen - Komplizierter zu Programmieren |
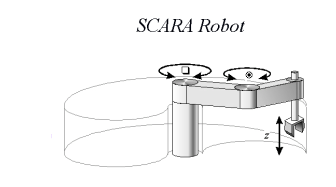
| Freiheitsgrade von Scara Roboter |
3 in Rotation
1 Translation (hoch/runter)
Image:
Scara (binary/octet-stream)
|
| Beispiele Scara Roboter? | - P&P (pick and place) - Verschraubungen |
| Vorteile Scara Roboter | - Hohe Winkelgeschwindigkeit - Mehrere Singularitäten - Hohe Steifigkeit in Vertikaler Richtung |
| Nachteile Scara Roboter | -(für Programmierer) Mehrere Singularitäten - Meistens nicht 360 Grad |
| Freiheitsgrade Sphärischer (polar) Roboter | 2 Rotation 1 Translation |
| Vorteile Sphärischer (polar) Roboter | - Kann hoch heben |
| Nachteile Sphärischer (polar) Roboter | - Komplexe Programmierung - Komplizierter Aufbau der Achse - Teuer - Transport fast nie Vertikal - Selten verwendet |
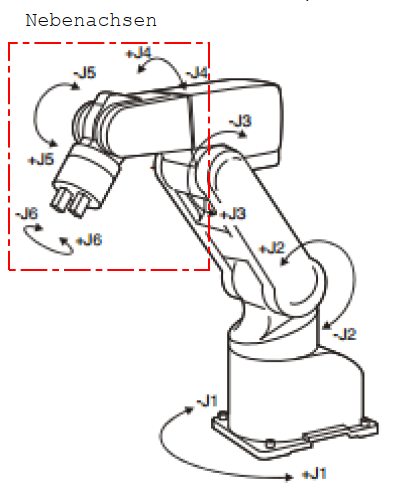
| Freiheitsgrade Knickarm-Roboter |
5 Rotationen
Image:
Knick (binary/octet-stream)
|
| Beispiele Knickarm-Roboter | - Automobilindustrie - Medizin - P&P - Bombenentschärfung - Barkeeper - CNC für Kunststoff oder Holz |
| Vorteile Knickarm-Roboter | - Sehr Flexibel - Hohe Winkelgeschwindigkeit - Grosse Arbeitszone |
| Nachteile Knickarm-Roboter | - Teuer - Aufwendige Programmierung (komplexe Mathematik) - Nicht sehr präzise (viele Axe fehler multipliziert) - Kollisionsgefahr |
| Freiheitsgrade Parallelroboter (Delta- Roboter) |
3 Rotationen
Image:
Delta (binary/octet-stream)
|
| Vorteile Parallelroboter (Delta- Roboter) | - Sehr Schnell - Hygienisch - geringe bewegte masse - hohe Dynamik |
| Nachteile Parallelroboter (Delta- Roboter) | - Schwer zu Programmieren (komplexe Mathematik) - Geringe Nutzlast - Beschränkter Arbeitsbereich |
| Beispiele Parallelroboter (Delta- Roboter) | - Sortieraufgaben P&P - 3D Drucker - Sterile aufgaben |
| Überlege dir was wohl die Haupt Achse und was die Neben Achse eines Knickarm Roboter sind. | |
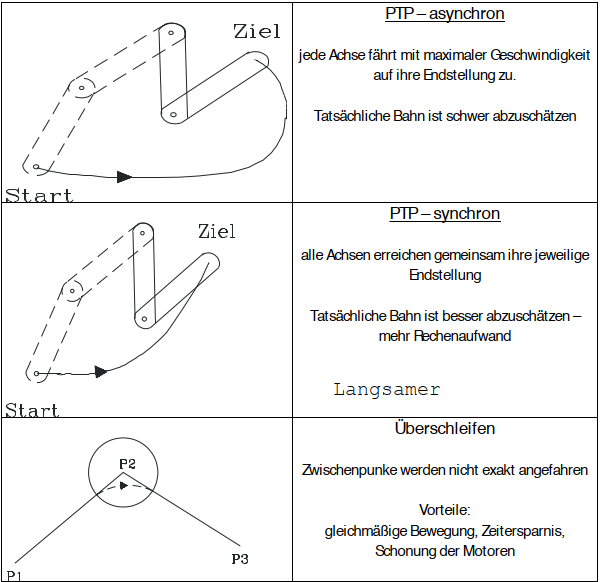
| Beschreibe den Unterschied von asynchronen, synchronen und Überschleifen Bewegungen. Und mögliche vorteile. | |
|
beschrifte die Nr.
Image:
Aufbau (binary/octet-stream)
|
1. Schrittnummer 2. Befehl 3. Befehlsparameter 4. Angehängte Anweisung (optional) |
| Convention Buchstabe für: - Position Variable - Gelenk Variable - Numerische Variable (integer, real) - String | - P Position Variable - J Gelenk Variable - M Numerische Variable (integer, real) - C String |
| Definiere eine Positionsvariable | DEF POS Pstart |
| Definiere eine Nummerische Variable für einen Zähler | DEF INTE Ncount |
| Warte befehl 1 Sekunde | DLY 1 |
| Sicherheitsregel: max Geschwindigkeit? | Bei den Versuchsdurchläufen ist die Geschwindigkeit OVRD max. 30%, und die Kontrollergeschwindigkeit max. 30% "OVRD 30" |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Flashcards for free with GoConqr? Learn more.