32856275
Description
Mind Map by GERSON ARIEL CORTEZ MEJIA, updated more than 1 year ago
|
|
Created by GERSON ARIEL CORTEZ MEJIA
over 3 years ago
|
|
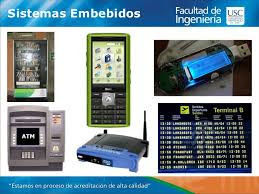
Sistemas Embebidos
- Que es un sistema embebido?
Annotations:
- Que es un sistema embebido?
- * En definición, un sistema embebido es un sistema
electrónico utilizado para ejecutar tareas de control.
Cada sistema embebido lleva a cabo 1 o varias tareas
según a lo que se le sea asignado. En pocas palabras
los sistemas Embebidos tienen el objetivo de cubrir
necesidades concretas
- Descripción
- En general, un sistema embebido simple
contará con un microprocesador, memoria,
unos pocos periféricos de E/S y un programa
dedicado a una aplicación concreta almacenado
permanentemente en la memoria
- Los Sistemas Embebidos se pueden programar
directamente en el lenguaje ensamblador del
microcontrolador o microprocesador
incorporado sobre el mismo, o también,
utilizando los compiladores específicos que
utilizan lenguajes como C o C++
- Los Sistemas Embebidos se pueden programar
directamente en el lenguaje ensamblador del
microcontrolador o microprocesador
incorporado sobre el mismo, o también,
utilizando los compiladores específicos que
utilizan lenguajes como C o C++
- En general, un sistema embebido simple
contará con un microprocesador, memoria,
unos pocos periféricos de E/S y un programa
dedicado a una aplicación concreta almacenado
permanentemente en la memoria
- Descripción
- Que es un sistema embebido en
tiempo real?
- Generalmente un Sistema Embebido es un sistema electrónico
diseñado para realizar pocas funciones en tiempo real,
según sea el caso. Al contrario de lo que ocurre con las
computadoras, las cuales tienen un propósito general,
ya que están diseñadas para cubrir un amplio rango de
necesidades y los Sistemas Embebidos se diseñan para
cubrir necesidades específicas.
- Descripción
- Por lo general un Sistemas Embebidos suele tener en
una de sus partes una computadora con características
especiales conocida como microcontrolador que viene a
ser el cerebro del sistema. Este no es más que un
microprocesador que incluye interfaces de
entrada/salida en el mismo chip. Normalmente estos
sistemas poseen una interfaz externa para efectuar un
monitoreo del estado y hacer un diagnóstico del
sistema.
- Los Sistemas Embebidos se pueden programar
directamente en el lenguaje ensamblador del
microcontrolador o microprocesador
incorporado sobre el mismo, o también,
utilizando los compiladores específicos que
utilizan lenguajes como C o C++
- Los Sistemas Embebidos se pueden programar
directamente en el lenguaje ensamblador del
microcontrolador o microprocesador
incorporado sobre el mismo, o también,
utilizando los compiladores específicos que
utilizan lenguajes como C o C++
- Por lo general un Sistemas Embebidos suele tener en
una de sus partes una computadora con características
especiales conocida como microcontrolador que viene a
ser el cerebro del sistema. Este no es más que un
microprocesador que incluye interfaces de
entrada/salida en el mismo chip. Normalmente estos
sistemas poseen una interfaz externa para efectuar un
monitoreo del estado y hacer un diagnóstico del
sistema.
- Descripción
- Generalmente un Sistema Embebido es un sistema electrónico
diseñado para realizar pocas funciones en tiempo real,
según sea el caso. Al contrario de lo que ocurre con las
computadoras, las cuales tienen un propósito general,
ya que están diseñadas para cubrir un amplio rango de
necesidades y los Sistemas Embebidos se diseñan para
cubrir necesidades específicas.
- Caracteristicas
Sistemas embebidos
- Los Sistemas Embebidos suelen trabajar de forma autónoma y
se caracterizan por funcionar de forma ininterrumpida y sin
necesidad de mantenimiento. Además, se pueden modificar en
gran medida en función de las necesidades de uso. Teniendo
esto en cuenta, cabe esperar que su número de aplicaciones
sea elevado. En consecuencia, uno de los sectores que más se
beneficia de los sistemas embebidos es el industrial.
- Caracteristicas Sistemas
embebidos en tiempo real
- Los sistemas embebidos en tiempo real tienen
características muy especiles; son usualmente
construidos sin un sistema operativo explícito, esto
debido a que hay sistemas que no requieren
mecanismos complejos o planificación en tiempo
real de tareas concurrentes y pueden ser
implementados usando un ciclo principal sencillo
- Los sistemas embebidos en tiempo real tienen
características muy especiles; son usualmente
construidos sin un sistema operativo explícito, esto
debido a que hay sistemas que no requieren
mecanismos complejos o planificación en tiempo
real de tareas concurrentes y pueden ser
implementados usando un ciclo principal sencillo
- Caracteristicas Sistemas
embebidos en tiempo real
- Los Sistemas Embebidos suelen trabajar de forma autónoma y
se caracterizan por funcionar de forma ininterrumpida y sin
necesidad de mantenimiento. Además, se pueden modificar en
gran medida en función de las necesidades de uso. Teniendo
esto en cuenta, cabe esperar que su número de aplicaciones
sea elevado. En consecuencia, uno de los sectores que más se
beneficia de los sistemas embebidos es el industrial.
- VENTAJAS Y DESVENTAJAS
- Ventajas
- Los sistemas embebidos se aplican en varios
ámbitos profesionales. Entre ellos,
encontramos: Por ello, hablamos de algunos
beneficios de estos sistemas en el entorno
industrial
- Control total.
- Conectividad y adaptabilidad.
- Reducción de costes
- Diseño modular.
- Corto tiempo de respuesta.
- Corto tiempo de respuesta.
- Diseño modular.
- Reducción de costes
- Conectividad y adaptabilidad.
- Campos de uso
- Automoción
- Salud
- Electrónica de consumo
- Militar
- Telecomunicaciones
- Tndustria
- Tndustria
- Telecomunicaciones
- Militar
- Electrónica de consumo
- Salud
- Automoción
- Ventajas
- Control total.
- Los sistemas embebidos se aplican en varios
ámbitos profesionales. Entre ellos,
encontramos: Por ello, hablamos de algunos
beneficios de estos sistemas en el entorno
industrial
- Desventajas
- Los sistemas embebidos están
ideados para blindar la seguridad
física, con capacidades de reinicio y
prevención de errores, pero la
ciberseguridad puede verse
comprometida.
- Cifrado débil
- Falta de certificados
- Backdoors
- Puertos de entrada y salida.
- Código libre o reutilizado
- Ataques DOS/DDOS
- Referencias
- * Tech Tribalyte. (Actualizado 2021). "Sistemas embebidos y sus
características". Tech Tribalyte. Obtenido el día 25 de Agosto del 2021 de:
https://tech.tribalyte.eu/blog-sistema-embebido-caracteristicas
- BELTRÁN S. LUIS DE JESÚS, GUEVARA L. PEDRO. (Actualizado 2021). "UN BREVE
ACERCAMIENTO A LOS SISTEMAS OPERATIVOS EN TIEMPO REAL EMBEBIDOS".
Comprendamos. Obtenido el día 25 de Agosto del 2021 de:
http://www.comprendamos.org/alephzero/63/sistemas.html
- Oasys. (Actualizado 2021). " Sistemas embebidos y su aportación a la industria". Oasys.
Obtenido el día 25 de Agosto del 2021 de:
https://oasys-sw.com/sistemas-embebidos-industria/
- Camargo. B Carlos Ivan. (2004). "DESARROLLO DE METODOLOGÍAS DE DISEÑO DE
SISTEMAS EMBEBIDOS PARA APLICACIONES INDUSTRIALES". Uermes UNC. Obtenido
el día 25 de Agosto del 2021 de:
http://www.hermes.unal.edu.co/pages/Consultas/Proyecto.xhtml?idProyecto=3602
- ROSAS OSCAR. ( 29 ENERO, 2017). "Arquitecturas Von-Newman VS Harvard". Compilando
Conocimiento. Obtenido el día 25 de Agosto del 2021 de:
https://compilandoconocimiento.com/2017/01/29/arquitecturasvon-newmanvsharvard/
- ROSAS OSCAR. ( 29 ENERO, 2017). "Arquitecturas Von-Newman VS Harvard". Compilando
Conocimiento. Obtenido el día 25 de Agosto del 2021 de:
https://compilandoconocimiento.com/2017/01/29/arquitecturasvon-newmanvsharvard/
- Camargo. B Carlos Ivan. (2004). "DESARROLLO DE METODOLOGÍAS DE DISEÑO DE
SISTEMAS EMBEBIDOS PARA APLICACIONES INDUSTRIALES". Uermes UNC. Obtenido
el día 25 de Agosto del 2021 de:
http://www.hermes.unal.edu.co/pages/Consultas/Proyecto.xhtml?idProyecto=3602
- Oasys. (Actualizado 2021). " Sistemas embebidos y su aportación a la industria". Oasys.
Obtenido el día 25 de Agosto del 2021 de:
https://oasys-sw.com/sistemas-embebidos-industria/
- BELTRÁN S. LUIS DE JESÚS, GUEVARA L. PEDRO. (Actualizado 2021). "UN BREVE
ACERCAMIENTO A LOS SISTEMAS OPERATIVOS EN TIEMPO REAL EMBEBIDOS".
Comprendamos. Obtenido el día 25 de Agosto del 2021 de:
http://www.comprendamos.org/alephzero/63/sistemas.html
- * Tech Tribalyte. (Actualizado 2021). "Sistemas embebidos y sus
características". Tech Tribalyte. Obtenido el día 25 de Agosto del 2021 de:
https://tech.tribalyte.eu/blog-sistema-embebido-caracteristicas
- Referencias
- Ataques DOS/DDOS
- Código libre o reutilizado
- Puertos de entrada y salida.
- Backdoors
- Falta de certificados
- Cifrado débil
- Los sistemas embebidos están
ideados para blindar la seguridad
física, con capacidades de reinicio y
prevención de errores, pero la
ciberseguridad puede verse
comprometida.
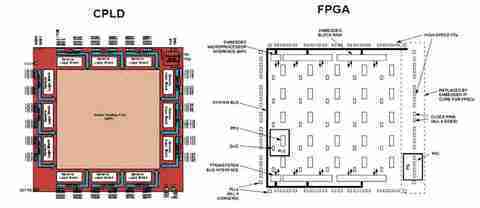
- FPGA
- Las Field Programmable Gate Arrays (FPGA)
son circuitos integrados reconfigurables
compuestos de interconexiones
programables que combinan bloques lógicos
programables, de memoria embebida y de
procesamiento de señales digitales, entre
otros.
- CDPL
- Un CPLD (del acrónimo inglés
Complex Programmable Logic Device)
es un dispositivo electrónico. Un CPLD
se forma con múltiples bloques lógicos,
cada uno similar a un PLD.
- ASIC
- n circuito Integrado para aplicaciones
específicas, es un circuito integrado
hecho a la medida para un uso en
particular, en vez de ser concebido para
propósitos de uso general.
- n circuito Integrado para aplicaciones
específicas, es un circuito integrado
hecho a la medida para un uso en
particular, en vez de ser concebido para
propósitos de uso general.
- Un CPLD (del acrónimo inglés
Complex Programmable Logic Device)
es un dispositivo electrónico. Un CPLD
se forma con múltiples bloques lógicos,
cada uno similar a un PLD.
- Las Field Programmable Gate Arrays (FPGA)
son circuitos integrados reconfigurables
compuestos de interconexiones
programables que combinan bloques lógicos
programables, de memoria embebida y de
procesamiento de señales digitales, entre
otros.
- Ventajas
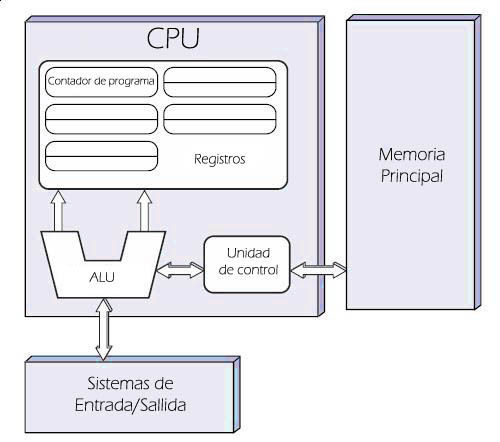
- Von Neumann
- Como bien sabemos la Arquitectura de Von Neumann:
"Tradicionalmente los sistemas con microprocesadores se basan
en esta arquitectura, en la cual la unidad central de proceso
(CPU), está conectada a una memoria principal única (casi
siempre sólo RAM) donde se guardan las instrucciones del
programa y los datos. A dicha memoria se accede a través de un
sistema de buses único (control, direcciones y datos)"
- Limitaciones
- La limitación de la longitud de las
instrucciones por el bus de datos, que
hace que el microprocesador tenga que
realizar varios accesos a memoria para
buscar instrucciones complejas.
- La limitación de la velocidad de operación a causa del bus
único para datos e instrucciones que no deja acceder
simultáneamente a unos y otras, lo cual impide superponer
ambos tiempos de acceso.
- La limitación de la velocidad de operación a causa del bus
único para datos e instrucciones que no deja acceder
simultáneamente a unos y otras, lo cual impide superponer
ambos tiempos de acceso.
- Ventajas
- La limitación de la longitud de las
instrucciones por el bus de datos, que
hace que el microprocesador tenga que
realizar varios accesos a memoria para
buscar instrucciones complejas.
- La limitación de la velocidad de
operación a causa del bus único para
datos e instrucciones que no deja
acceder simultáneamente a unos y
otras, lo cual impide superponer
ambos tiempos de acceso.
- La limitación de la velocidad de
operación a causa del bus único para
datos e instrucciones que no deja
acceder simultáneamente a unos y
otras, lo cual impide superponer
ambos tiempos de acceso.
- La limitación de la longitud de las
instrucciones por el bus de datos, que
hace que el microprocesador tenga que
realizar varios accesos a memoria para
buscar instrucciones complejas.
- La limitación de la longitud de las
instrucciones por el bus de datos, que
hace que el microprocesador tenga que
realizar varios accesos a memoria para
buscar instrucciones complejas.
- Limitaciones
- Cuello de botella
- Ootro de los problemas que tiene esta arquitectura
es el cuello de botella que consiste en que el canal
de transmisión de los datos compartido entre CPU y
memoria genera un cuello de botella de Von
Neumann, un rendimiento limitado (tasa de
transferencia de datos) entre la CPU y la memoria
en comparación con la cantidad de memoria.
- Ootro de los problemas que tiene esta arquitectura
es el cuello de botella que consiste en que el canal
de transmisión de los datos compartido entre CPU y
memoria genera un cuello de botella de Von
Neumann, un rendimiento limitado (tasa de
transferencia de datos) entre la CPU y la memoria
en comparación con la cantidad de memoria.
- Como bien sabemos la Arquitectura de Von Neumann:
"Tradicionalmente los sistemas con microprocesadores se basan
en esta arquitectura, en la cual la unidad central de proceso
(CPU), está conectada a una memoria principal única (casi
siempre sólo RAM) donde se guardan las instrucciones del
programa y los datos. A dicha memoria se accede a través de un
sistema de buses único (control, direcciones y datos)"
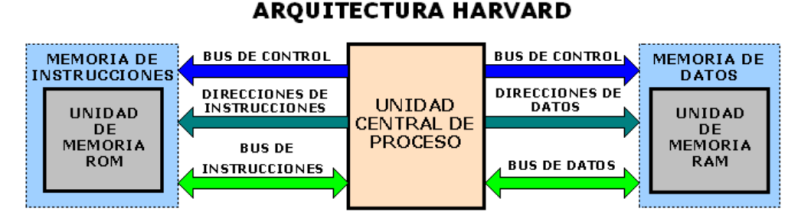
- Arquitectura Harvard
- Este modelo, que utilizan los micro
controladores PIC, tiene la unidad central
de proceso (CPU) conectada a dos memorias
(una con las instrucciones y otra con los
datos) por medio de dos buses diferentes.
- Una de las memorias contiene
solamente las instrucciones
del programa (Memoria de
Programa)
- la otra sólo almacena datos
(Memoria de Datos)
- Ambos buses son totalmente
independientes lo que permite
que la CPU pueda acceder de
forma independiente y
simultánea a la memoria de
datos y a la de instrucciones.
- También la longitud de los datos y
las instrucciones puede ser
distinta, lo que optimiza el uso de
la memoria en general. Para un
procesador de Set de Instrucciones
Reducido, o RISC
- el set de instrucciones y el bus de memoria de
programa pueden diseñarse de tal manera que
todas las instrucciones tengan una sola
posición de memoria de programa de longitud.
- Además, al ser los buses
independientes, la CPU puede
acceder a los datos para completar
la ejecución de una instrucción, y
al mismo tiempo leer la siguiente
instrucción a ejecutar.
- Además, al ser los buses
independientes, la CPU puede
acceder a los datos para completar
la ejecución de una instrucción, y
al mismo tiempo leer la siguiente
instrucción a ejecutar.
- el set de instrucciones y el bus de memoria de
programa pueden diseñarse de tal manera que
todas las instrucciones tengan una sola
posición de memoria de programa de longitud.
- También la longitud de los datos y
las instrucciones puede ser
distinta, lo que optimiza el uso de
la memoria en general. Para un
procesador de Set de Instrucciones
Reducido, o RISC
- Ambos buses son totalmente
independientes lo que permite
que la CPU pueda acceder de
forma independiente y
simultánea a la memoria de
datos y a la de instrucciones.
- la otra sólo almacena datos
(Memoria de Datos)
- Una de las memorias contiene
solamente las instrucciones
del programa (Memoria de
Programa)
- Ventajas
- El tamaño de las instrucciones no está
relacionado con el de los datos, y por lo tanto
puede ser optimizado para que cualquier
instrucción ocupe una sola posición de memoria
de programa, logrando así mayor velocidad y
menor longitud de programa
- El tiempo de acceso a las instrucciones
puede superponerse con el de los
datos, logrando una mayor velocidad
en cada operación.
- El tiempo de acceso a las instrucciones
puede superponerse con el de los
datos, logrando una mayor velocidad
en cada operación.
- El tamaño de las instrucciones no está
relacionado con el de los datos, y por lo tanto
puede ser optimizado para que cualquier
instrucción ocupe una sola posición de memoria
de programa, logrando así mayor velocidad y
menor longitud de programa
- Este modelo, que utilizan los micro
controladores PIC, tiene la unidad central
de proceso (CPU) conectada a dos memorias
(una con las instrucciones y otra con los
datos) por medio de dos buses diferentes.
- Arquitectura Von-Newman VS
Arquitectura Harvard
- Arquitectura Von Neumann con
respecto de la Arquitectura Harvard
- Los datos y las
instrucciones(secuencia de
control), Se almacenan en
una misma memoria de
lectura/escritura.
- No se pueden diferenciar entre datos e
instrucciones al examinar una posición de
memoria (Location).
- Los contenidos de la memoria son
direccionados por su ubicación(location), sin
importar el tipo de datos contenido all.
- La ejecución ocurre en modo secuencial
mediante la lectura de instrucciones
consecutivas desde la memoria.
- La ejecución ocurre en modo secuencial
mediante la lectura de instrucciones
consecutivas desde la memoria.
- Los contenidos de la memoria son
direccionados por su ubicación(location), sin
importar el tipo de datos contenido all.
- No se pueden diferenciar entre datos e
instrucciones al examinar una posición de
memoria (Location).
- Los datos y las
instrucciones(secuencia de
control), Se almacenan en
una misma memoria de
lectura/escritura.
- Arquitectura Harvard con respecto
de la Arquitectura Von Neumann
- Las instrucciones y los datos se
almacenan en caches separadas para
mejorar el rendimiento.
- Por otro lado, tiene el inconveniente de
tener que dividir la cantidad de cach entre
los dos, por lo que funciona mejor sólo
cuando la frecuencia de lectura de
instrucciones y de datos es
aproximadamente la misma.
- Esta arquitectura suele utilizarse en DSPs, o
procesador de señal digital, usados
habitualmente en productos para
procesamiento de audio y video.
- Esta arquitectura suele utilizarse en DSPs, o
procesador de señal digital, usados
habitualmente en productos para
procesamiento de audio y video.
- Por otro lado, tiene el inconveniente de
tener que dividir la cantidad de cach entre
los dos, por lo que funciona mejor sólo
cuando la frecuencia de lectura de
instrucciones y de datos es
aproximadamente la misma.
- Las instrucciones y los datos se
almacenan en caches separadas para
mejorar el rendimiento.
- Arquitectura Von Neumann con
respecto de la Arquitectura Harvard
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.