37226293
Description
Mind Map by ALEJANDRO PEREZ, updated more than 1 year ago
|
|
Created by ALEJANDRO PEREZ
over 2 years ago
|
|
Método de la Gran M
- Existen problemas de programación lineal que no proporcionan
una solución básica inicial. Esta situación se presenta cuando al
menos una de las restricciones es del tipo (<=) o (=)
- Ejemplo
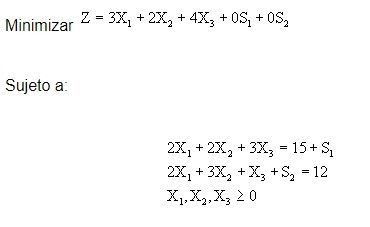
- 1. Exprese el problema en forma estándar
transformando las inecuaciones en
ecuaciones introduciendo variables de
holgura.
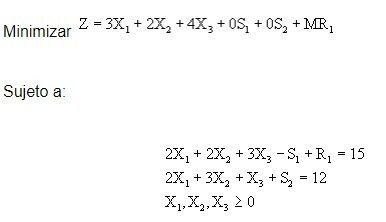
- 2. Agregue variables no negativas al lado izquierdo de
cada una de las ecuaciones correspondientes a las
restricciones de tipo (>=) o (=). Estas variables se
denominan variables artificiales y su adición hace que
las restricciones correspondientes.
- Esta dificultad se elimina asegurando que las variables
sean 0 en la solución final. Esto se logra asignando una
penalización muy grande por unidad a estas variables
en la función objetivo. Tal penalización se designará
como –M para problemas de maximización y +M para
problemas de minimización.
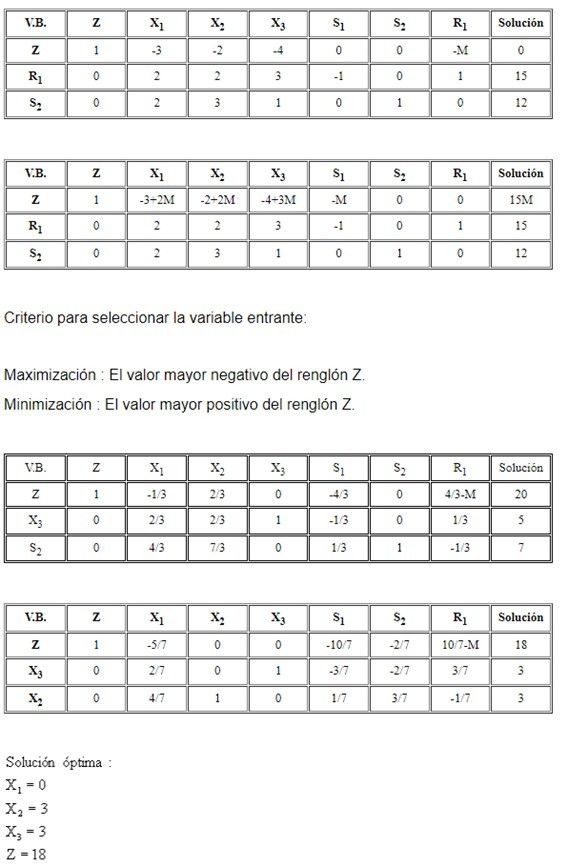
- 3. Utiliza las variables artificiales en la solución básica
inicial; sin embargo la función objetivo de la tabla inicial
se prepara adecuadamente para expresarse en
términos de las variables no básicas únicamente. Esto
significa que los coeficientes de las variables artificiales
en la función objetivo deben ser 0 un resultado que
puede lograrse sumando múltiplos adecuados de las
ecuaciones de restricción al renglón objetivo.
- 4. Proceda con los pasos regulares del método simplex.
- 4. Proceda con los pasos regulares del método simplex.
- 3. Utiliza las variables artificiales en la solución básica
inicial; sin embargo la función objetivo de la tabla inicial
se prepara adecuadamente para expresarse en
términos de las variables no básicas únicamente. Esto
significa que los coeficientes de las variables artificiales
en la función objetivo deben ser 0 un resultado que
puede lograrse sumando múltiplos adecuados de las
ecuaciones de restricción al renglón objetivo.
- Esta dificultad se elimina asegurando que las variables
sean 0 en la solución final. Esto se logra asignando una
penalización muy grande por unidad a estas variables
en la función objetivo. Tal penalización se designará
como –M para problemas de maximización y +M para
problemas de minimización.
- 2. Agregue variables no negativas al lado izquierdo de
cada una de las ecuaciones correspondientes a las
restricciones de tipo (>=) o (=). Estas variables se
denominan variables artificiales y su adición hace que
las restricciones correspondientes.
- 1. Exprese el problema en forma estándar
transformando las inecuaciones en
ecuaciones introduciendo variables de
holgura.
- Ejemplo
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.