6462211
Description
Mind Map by Rommel Arel Leal Palomares, updated more than 1 year ago
|
|
Created by Rommel Arel Leal Palomares
over 8 years ago
|
|
Arquitectura de microcontroladores
- ¿Qué es un microcontrolador?
- Los microcontroladores ( abreviado μC, UC o MCU ) son circuitos integrados que son capaces de
ejecutar ordenes que fueron grabadas en su memoria. Su composición esta dada por varios bloques
funcionales, los cuales cumplen una tarea especifica, son dispositivos que operan uno o mas
procesos, por lo general los microcontroladores están basados en la arquitectura de Harvard, la cual
consiste en dispositivos de almacenamiento separados (memoria de programa y memoria de datos).
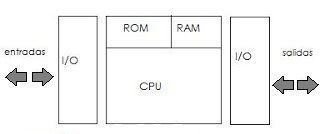
- Arquitectura de un microcontrolador
- CPU (unidad central de proceso): Podemos decir que la CPU, siglas en inglés de unidad central de
proceso, es el núcleo del microcontrolador. Se encarga de ejecutar las instrucciones almacenadas
en la memoria, de la que hablaremos más adelante. Es lo que habitualmente llamamos
procesador o microprocesador, término que a menudo se confunde con el de microcontrolador.
- Memoria: Entendemos por memoria los diferentes componentes del microcontrolador que se
emplean para almacenar información durante un periodo determinado de tiempo. La información
que necesitaremos durante la ejecución del programa será, por un lado, el propio código, y por otro,
los diferentes datos que usemos durante la ejecución del mismo. Hablaremos por tanto de memoria
de programa y de memoria de datos, respectivamente.
- Unidades de entrada/salida: Las unidades de entrada/salida son los sistemas que emplea el
microcontrolador para comunicarse con el exterior. Imaginemos una televisión: por un lado tiene un
dispositivo de salida, como es la pantalla, y por otro lado, de entrada, como son los botones de subir
o bajar volumen y de cambio de canal. Así, los dispositivos de entrada nos permitirán introducir
información en el microcontrolador y los de salida nos servirán para que éste la saque al exterior.
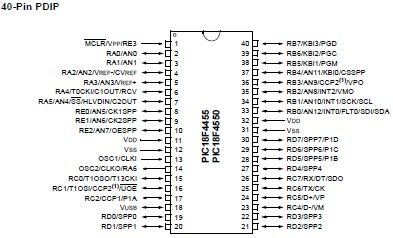
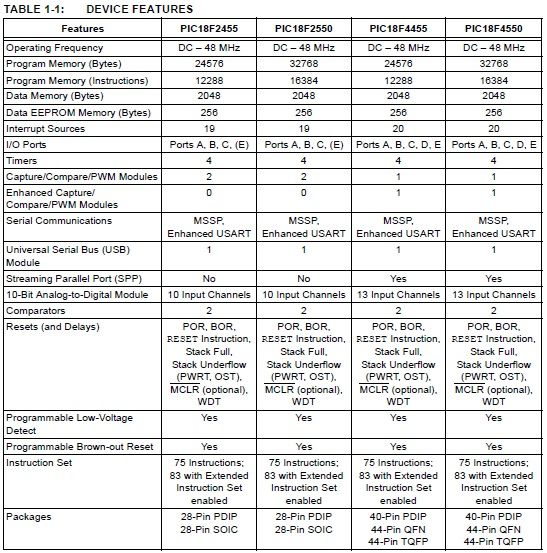
- Micrcontrolador:
18f4550
- -Alto rendimiento computacional -precio económico - alta
resistencia-programa de memoria flash mejorado
- Características
- Terminales
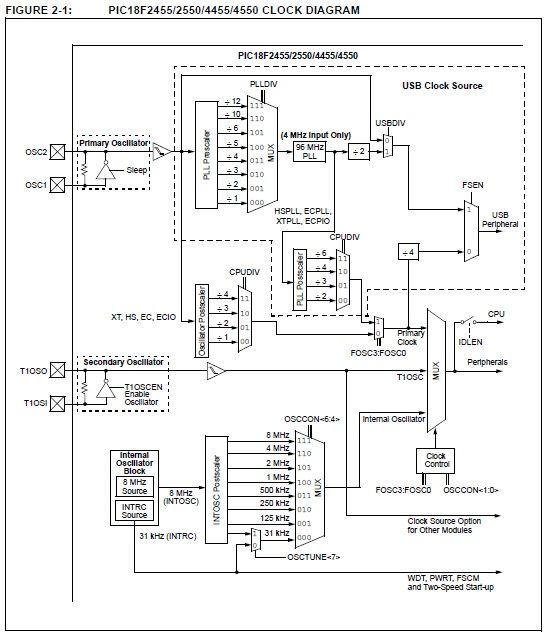
- Configuración de reloj
- Incluye una nueva rama para proporcionar un reloj de
48 MHz para la operación USB de alta velocidad. Ya que
es impulsado desde la fuente de reloj primaria, una
sistema adicional se ha agregado con preescaladores y
postescaladores para acomodar una amplia gama
frecuencias de oscilador. Una visión general de la
estructura del oscilador se muestra en la Figura 2-1 ..
- Incluye una nueva rama para proporcionar un reloj de
48 MHz para la operación USB de alta velocidad. Ya que
es impulsado desde la fuente de reloj primaria, una
sistema adicional se ha agregado con preescaladores y
postescaladores para acomodar una amplia gama
frecuencias de oscilador. Una visión general de la
estructura del oscilador se muestra en la Figura 2-1 ..
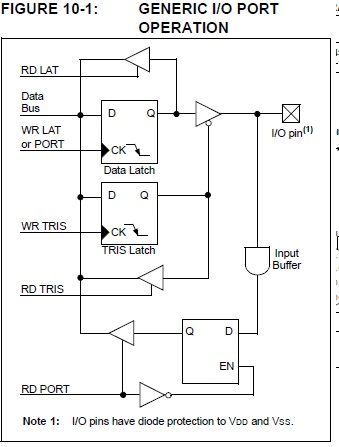
- Puertos I/O
- Dependiendo del dispositivo seleccionado y características habilitadas, hay hasta cinco puertos
disponibles. Algunos pines de los puertos E / S son multiplexados con una función suplente. En
general, cuando se habilita un periférico, el pin no podrá ser utilizado como un pin I / O de
propósito general. Cada puerto tiene tres registros para su funcionamiento. Estas registros son:
• registro TRIS (dirección de datos de registro) • registro PORT (lee los niveles en los pines de la
dispositivo) • LAT registro (pestillo de salida) El registro de datos del Seguro (LATA) es útil para
leer-modificar las operaciones de escritura en el valor impulsado por las terminales I / O.
- Dependiendo del dispositivo seleccionado y características habilitadas, hay hasta cinco puertos
disponibles. Algunos pines de los puertos E / S son multiplexados con una función suplente. En
general, cuando se habilita un periférico, el pin no podrá ser utilizado como un pin I / O de
propósito general. Cada puerto tiene tres registros para su funcionamiento. Estas registros son:
• registro TRIS (dirección de datos de registro) • registro PORT (lee los niveles en los pines de la
dispositivo) • LAT registro (pestillo de salida) El registro de datos del Seguro (LATA) es útil para
leer-modificar las operaciones de escritura en el valor impulsado por las terminales I / O.
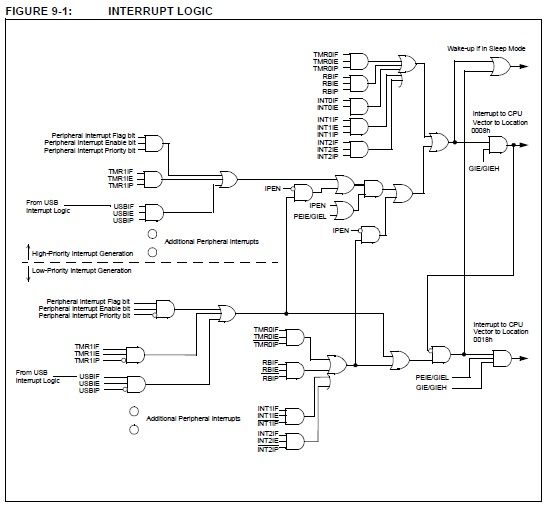
- Interrupciones
- El pic 18f4550 tiene multiples fuentes de interrupción y una característica de interrupción de
prioridad que permite que cada fueten de interrupción sea asignada a un nivel de prioridad alto
o a un nivel de prioridad bajo. El vector de interrupción de prioridad alta se encuentra es
000008h y el de nivel de interrupción baja es el 000018h. Los eventos de interrupcióin de
prioridad alta interrumpirá cualquier interrupción de baja prioridad que se encuentre en
progreso. Hay diez registros que son usados para contrlar la actividad de interrupción. Estos
registros son: RCON, INTCON, INTCON2, INTCON3, PIR1, PIR2, PIE3, PIE2, IPR1, IPR2. Cada fuente
de interrupción tiene tres bits de control en su operación. Las funciones de estos bits son: *Bit de
bandera para indicar que un evento de interrupción ha ocurrido. *Bit de habilitación que
permite la ejecución del programa para trasladarse hasta la dirección del vector de interrupción
cuando la bandera es puesta. *Bit de prioridad
- El pic 18f4550 tiene multiples fuentes de interrupción y una característica de interrupción de
prioridad que permite que cada fueten de interrupción sea asignada a un nivel de prioridad alto
o a un nivel de prioridad bajo. El vector de interrupción de prioridad alta se encuentra es
000008h y el de nivel de interrupción baja es el 000018h. Los eventos de interrupcióin de
prioridad alta interrumpirá cualquier interrupción de baja prioridad que se encuentre en
progreso. Hay diez registros que son usados para contrlar la actividad de interrupción. Estos
registros son: RCON, INTCON, INTCON2, INTCON3, PIR1, PIR2, PIE3, PIE2, IPR1, IPR2. Cada fuente
de interrupción tiene tres bits de control en su operación. Las funciones de estos bits son: *Bit de
bandera para indicar que un evento de interrupción ha ocurrido. *Bit de habilitación que
permite la ejecución del programa para trasladarse hasta la dirección del vector de interrupción
cuando la bandera es puesta. *Bit de prioridad
- Perro guardián
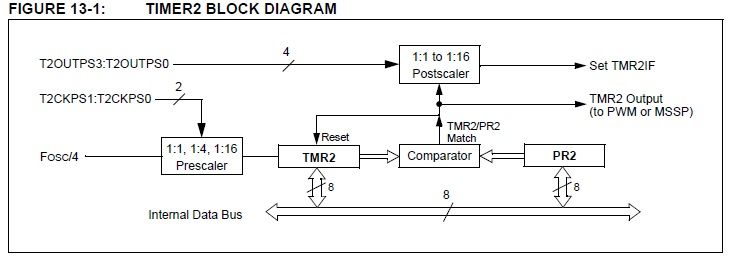
- Para los temporizadores los registros TMR2 y PR2 se pueden leer y escribir
directamente. El registro TMR2 es limpio en cualquier Reset de dispositivo, mientras el
registro PR2 inicializa en FFh. Los contadores del prescalador y el postescalador son
claros en los siguientes eventos: *Escribir en un registro TMR2, *Escribir en un registro
T2CON y *Cualquier dispositivo de Reset (Reset Power-on, Reset MCLR, Reset de
temporizador perro guradián o Reset Brown-out
- Para los temporizadores los registros TMR2 y PR2 se pueden leer y escribir
directamente. El registro TMR2 es limpio en cualquier Reset de dispositivo, mientras el
registro PR2 inicializa en FFh. Los contadores del prescalador y el postescalador son
claros en los siguientes eventos: *Escribir en un registro TMR2, *Escribir en un registro
T2CON y *Cualquier dispositivo de Reset (Reset Power-on, Reset MCLR, Reset de
temporizador perro guradián o Reset Brown-out
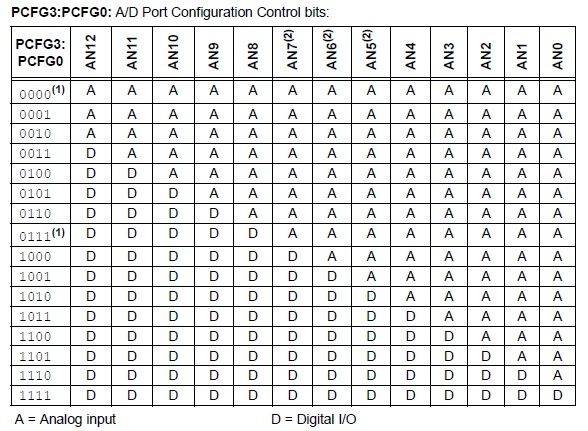
- Convertidor A/D
- El módulo tiene 10 entradas para 28 pines de dispositivo y 13 para los
dispositivos de 40/44 pines. Este módulo permite la conversión de una
entrada análoga a su correspondiente número digital de 10 bits. El
módulo tiene cinco registros: *A/D Registro de resultado alto (ADRESH),
*A/D Registro de resultado bajo (ADRESL), *A/D Registro de control 0
(ADCON 0), *A/D Registro de control 1 (ADCON 1), * A/D Registro de
control 2.
- El módulo tiene 10 entradas para 28 pines de dispositivo y 13 para los
dispositivos de 40/44 pines. Este módulo permite la conversión de una
entrada análoga a su correspondiente número digital de 10 bits. El
módulo tiene cinco registros: *A/D Registro de resultado alto (ADRESH),
*A/D Registro de resultado bajo (ADRESL), *A/D Registro de control 0
(ADCON 0), *A/D Registro de control 1 (ADCON 1), * A/D Registro de
control 2.
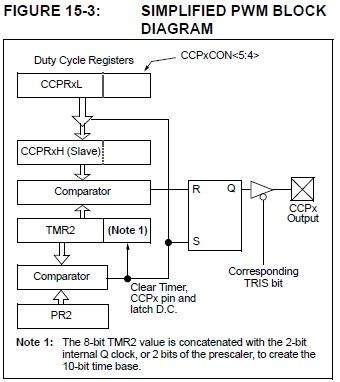
- Captura/Comparación/PWM
- Se tienen dos módulos CCP. El módo PWM (modulación de ancho de pulso), el pin CCPx produce más
de 10 bit de resolución de salida PWM. Desde que la terminal CCP2 es multiplexada con los pestillos de
datos PORTB o PORTC, el bit TRIS apropiado debe de ser limpiado para hacer que la terminal CCP2 sea
salida.
- Se tienen dos módulos CCP. El módo PWM (modulación de ancho de pulso), el pin CCPx produce más
de 10 bit de resolución de salida PWM. Desde que la terminal CCP2 es multiplexada con los pestillos de
datos PORTB o PORTC, el bit TRIS apropiado debe de ser limpiado para hacer que la terminal CCP2 sea
salida.
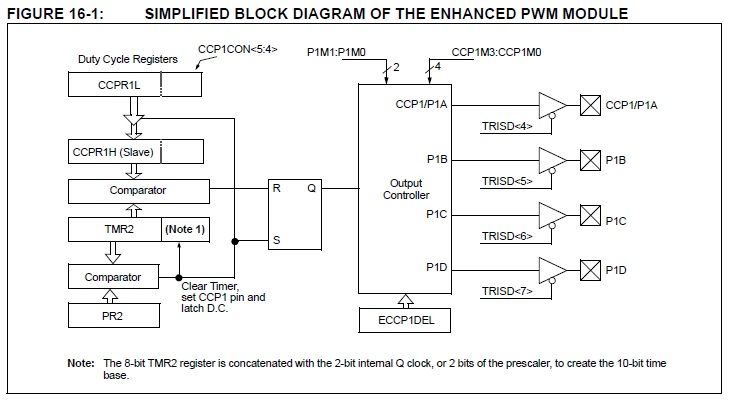
- Captura mejorada/
comparación /PWM
- El módo PWM mejorado provee opciones de salida
adicionales para un amplio rango de aplicaciones de
control. El módulo es una versión compatible de
respaldo del módulo estándar CCP y ofrece más de
cuatro salidas, designadas P1A hasta P1D. Los usuarios
pueden seleccionar la polaridad de la señal (cualquiera
sea activa-alta o activa baja). El modo de salida del
módulo y polaridad es configurado fijando los bits
P1M1:P1M0 y CCP1M3:CCP1M0 en el registro CCP1CON.
- El módo PWM mejorado provee opciones de salida
adicionales para un amplio rango de aplicaciones de
control. El módulo es una versión compatible de
respaldo del módulo estándar CCP y ofrece más de
cuatro salidas, designadas P1A hasta P1D. Los usuarios
pueden seleccionar la polaridad de la señal (cualquiera
sea activa-alta o activa baja). El modo de salida del
módulo y polaridad es configurado fijando los bits
P1M1:P1M0 y CCP1M3:CCP1M0 en el registro CCP1CON.
- Transmisor Receptor Sincrono
Asincrono Universal Mejorado
(EUSART)
- Es uno de los dos módulos se entradas seriales I/O.
(Generlamente, el USART es además conocido como
Interface de Comunicaciones Seriales o SCI) El EUSART
puede ser configurado como un sistema asincrono
full-duplex que puede comunicar con dispositivos
periféricos, como las terminales CRT y las
computadoras personales. Puede ser además
configurado como sistema medio-duplex sincrono que
se puede comunicar con dispositivos periféricos,
como los circuitos integrados A/D o D/A, EEPROMs
seriales, etc.
- Es uno de los dos módulos se entradas seriales I/O.
(Generlamente, el USART es además conocido como
Interface de Comunicaciones Seriales o SCI) El EUSART
puede ser configurado como un sistema asincrono
full-duplex que puede comunicar con dispositivos
periféricos, como las terminales CRT y las
computadoras personales. Puede ser además
configurado como sistema medio-duplex sincrono que
se puede comunicar con dispositivos periféricos,
como los circuitos integrados A/D o D/A, EEPROMs
seriales, etc.
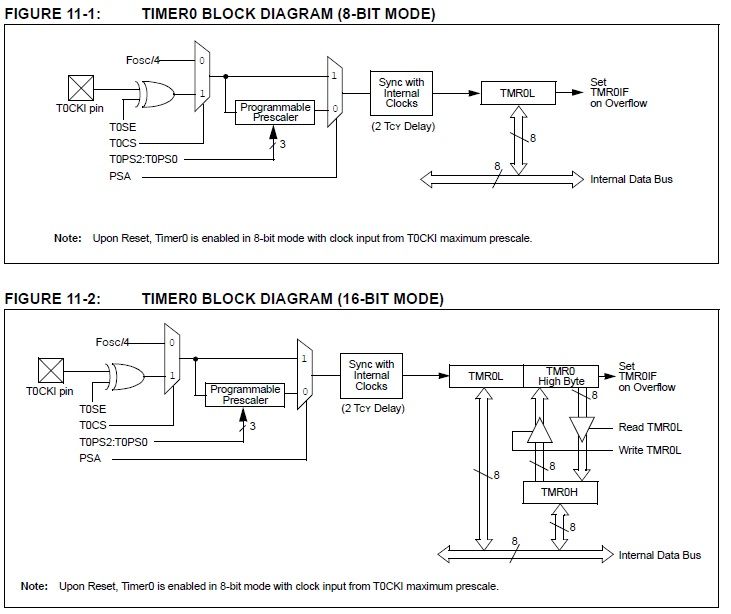
- Temporizadores
- El módulo de temporización incorpora las
siguientes características: *Operación de
selección de software como temporizador
o contador en 8 bits o 16 bits. * Registros
de lectura y escritura. *Software de
preescalador programable, de 8 bits.
*Fuente de reloj seleccionable (interna o
externa). *Esquina de reloj externo.
*Interrupción en sobre-flujo. El registro
T0CON control alos aspectos de operación
del módulo incluyendo la selección del
preescalador. Puede ser tanto de lectura
como de escritura.
- El módulo de temporización incorpora las
siguientes características: *Operación de
selección de software como temporizador
o contador en 8 bits o 16 bits. * Registros
de lectura y escritura. *Software de
preescalador programable, de 8 bits.
*Fuente de reloj seleccionable (interna o
externa). *Esquina de reloj externo.
*Interrupción en sobre-flujo. El registro
T0CON control alos aspectos de operación
del módulo incluyendo la selección del
preescalador. Puede ser tanto de lectura
como de escritura.
- Características
- -Alto rendimiento computacional -precio económico - alta
resistencia-programa de memoria flash mejorado
- CPU (unidad central de proceso): Podemos decir que la CPU, siglas en inglés de unidad central de
proceso, es el núcleo del microcontrolador. Se encarga de ejecutar las instrucciones almacenadas
en la memoria, de la que hablaremos más adelante. Es lo que habitualmente llamamos
procesador o microprocesador, término que a menudo se confunde con el de microcontrolador.
- Los microcontroladores ( abreviado μC, UC o MCU ) son circuitos integrados que son capaces de
ejecutar ordenes que fueron grabadas en su memoria. Su composición esta dada por varios bloques
funcionales, los cuales cumplen una tarea especifica, son dispositivos que operan uno o mas
procesos, por lo general los microcontroladores están basados en la arquitectura de Harvard, la cual
consiste en dispositivos de almacenamiento separados (memoria de programa y memoria de datos).
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.