15926187
Description
Quiz by Lukas Paulun, updated more than 1 year ago
|
|
Created by Lukas Paulun
about 6 years ago
|
|
Question 1
Question
Three types of movements (antialphabetic):
- [blank_start]Voluntary[blank_end] movements
- [blank_start]Rhythmic[blank_end] movements
- [blank_start]Reflexes[blank_end]
Answer
-
Voluntary
-
Rhythmic
-
Reflexes
Question 2
Question
The visuomotor delay is approximately [blank_start]200[blank_end] ms.
The proprioceptive delay is approximately [blank_start]50[blank_end] ms.
Answer
-
200
-
250
-
300
-
150
-
50
-
30
-
80
-
150
Question 3
Question
Three things that make motor control difficult (alphabetic):
- [blank_start]environmental[blank_end] uncertainty
- [blank_start]motor[blank_end] noise
- [blank_start]sensory[blank_end] noise
Answer
-
environmental
-
motor
-
sensory
Question 4
Question
The human body has "only" 600 muscles. Nonetheless motor control is very difficult, since the number of possible movement patterns increases [blank_start]exponentially[blank_end] with the [blank_start]degrees of freedom[blank_end].
Answer
-
exponentially
-
degrees of freedom
Question 5
Question
The principle of [blank_start]redundancy[blank_end] means that there is a [blank_start]gap[blank_end] between high- and low-level specification. Any high level task can be achieved in [blank_start]infinitely[blank_end] many low level ways.
Answer
-
redundancy
-
gap
-
infinitely
Question 6
Question
[blank_start]Fitt's[blank_end] law describes the [blank_start]speed-accuracy[blank_end] trade-off.
Answer
-
Fitt's
-
speed-accuracy
Question 7
Question
In simple grasping tasks the paths of hand movements are usually [blank_start]straight[blank_end] and the speed profiles are [blank_start]bell-shaped[blank_end].
Answer
-
straight
-
bell-shaped
Question 8
Question
The two-thirds power law:
[blank_start]angular[blank_end] velocity ~ [blank_start]curvature[blank_end]^(2/3)
Answer
-
angular
-
curvature
Question 9
Question
Three levels of analysis:
(1) [blank_start]Computational[blank_end]: What is the [blank_start]problem[blank_end] the brain is trying to solve?
(2) [blank_start]Algorithmic[blank_end]: What is the [blank_start]strategy[blank_end] to solve this problem?
(3) [blank_start]Neuronal[blank_end]: How is it done by the nervous system?
Answer
-
Computational
-
Algorithmic
-
Neuronal
-
problem
-
strategy
Question 10
Question
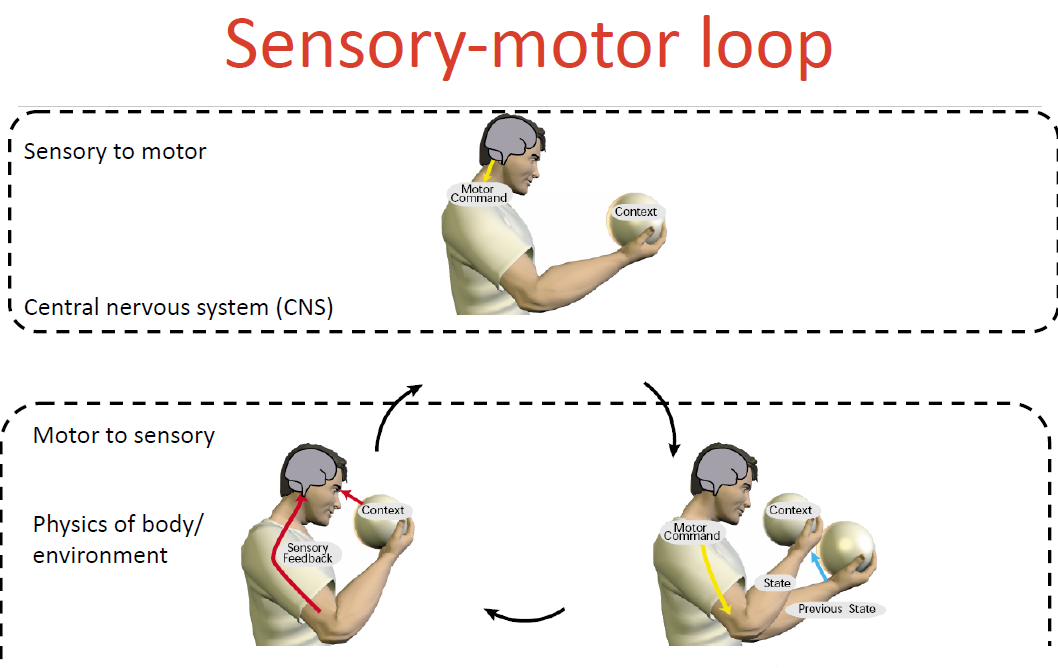
The forward model [blank_start]predicts behaviour[blank_end] based on [blank_start]motor commands[blank_end].
The inverse model [blank_start]calculates motor commands[blank_end] from [blank_start]desired behaviour[blank_end].
Answer
-
predicts behaviour
-
motor commands
-
calculates motor commands
-
desired behaviour
-
predicts motor commands
Question 11
Question
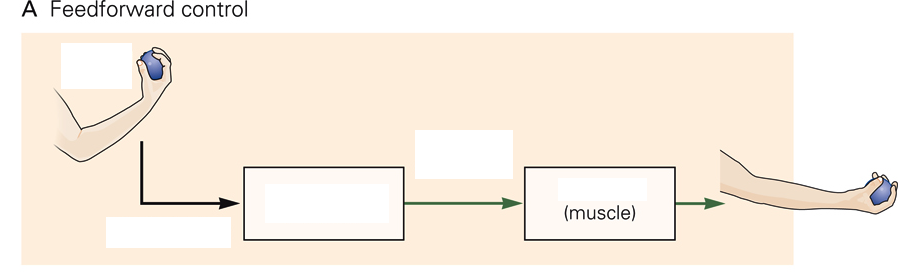
Feedforward ([blank_start]open[blank_end]-loop) control:
Because of the delays in the sensorimotor system, open-loop control is used for [blank_start]short[blank_end] movements.
Disadvantages:
- [blank_start]Inaccuracies[blank_end] cannot be corrected
- [blank_start]Unexpected changes[blank_end] will not be taken into account
Answer
-
short
-
long
-
open
-
closed
-
Inaccuracies
-
Delays
-
Noise
-
Unexpected changes
-
Inaccuracies
-
Noise
Question 12
Question
In order for feedforward control to be sufficient, the [blank_start]inverse[blank_end] model would have to be perfect.
Answer
-
inverse
Question 13
Question
Feedback (closed-loop) control can compensate for errors due to
Answer
-
neural noise
-
unexpected changes in the outside world
-
inaccurate motor commands
-
the sensorimotor delay
-
proprioception
Question 14
Question
In an experiment, subjects are given 400g blocks and practice to lift them.
After training the weight is surprisingly increased to 800g.
The experiment shows the subjects use
Answer
-
feedforward control.
-
feedback control.
-
both feedforward and feedback control.
Question 15
Question
The [blank_start]gain[blank_end] factor is the amount by which the [blank_start]corrective[blank_end] motor command is increased or decreased per unit of error.
Answer
-
gain
-
corrective
Question 16
Question
[blank_start]High[blank_end] gain and [blank_start]high[blank_end] sensorimotor delay can lead to [blank_start]overcompensation[blank_end] and [blank_start]instabilities[blank_end].
Answer
-
High
-
Low
-
high
-
low
-
overcompensation
-
too little compensation
-
instabilities
-
a stable motor command
Question 17
Question
An [blank_start]efference[blank_end] copy is an internal copy of an outflowing ([blank_start]efferent[blank_end]), movement-producing signal generated by the motor system.
Answer
-
efference
-
afference
-
efferent
-
afferent
Question 18
Question
Two strategies to compensate for sensory delays:
(1) [blank_start]Intermittency[blank_end] of movements
(2) [blank_start]Prediction[blank_end]
Answer
-
Intermittency
-
Prediction
Question 19
Question
The experiment where you move your eyeball with your hand and the world moves shows that the brain uses [blank_start]motor commands to the eye[blank_end] in order to predict the eye's position.
Answer
-
motor commands to the eye
-
sensors in the eye muscles
Question 20
Question
What's the problem with using a forward model in feedback control to predict the position of a limb.
Answer
-
Errors accumulate over time.
-
Delay leads to instabilites.
-
Actually an inverse model would have to be used.
Question 21
Question
Which are the main structures of the CNS involved in motor control?
Answer
-
pons
-
spinal cord: reflexes
-
brainstem: facial muscles
-
cerebral cortex as the generator
-
cerebellum
-
basal ganglia
-
medulla oblongata
-
hippocampus
-
dentate gyrus
Question 22
Question
A motor unit consists of [blank_start]a spinal motor neuron[blank_end] and [blank_start]the muscle fibres that it innervates.[blank_end]
Answer
-
a spinal motor neuron
-
a sensory interneuron
-
a pyramidal motor neuron
-
the muscle fibres that it innervates.
-
the motor neurons it projects to.
-
the disc in the spinal cord it projects
Question 23
Question
A muscle is typically innervated by [blank_start]a few hundred[blank_end] spinal motor neurons.
Answer
-
a few hundred
-
a few thousand
-
about 50
-
about 50.000
Question 24
Question
The [blank_start]innervation number[blank_end] tells how many muscle fibres a motor neuron innervates.
Answer
-
innervation number
Question 25
Question
The innervation number
Answer
-
indicates the increment in force when the motor unit is activated.
-
can be very different for the same muscle.
-
is the same for all neurons that project to one muscle
-
indicates the speed by which the muscle is activated
Question 26
Question
The muscle force is controlled by
Answer
-
recruitment (how many motor neurons of the unit fire)
-
the discharge rate of motor units
-
the innervation number of the motor unit
-
the axon diameter of the motor neuron
Question 27
Question
Motor units differ in [blank_start]speed[blank_end] and maximum [blank_start]force[blank_end].
Answer
-
speed
-
force
Question 28
Question
Recruitment:
[blank_start]Small[blank_end] motor neurons are recruited first because of the [blank_start]high[blank_end] resistance within their axon.
They have a [blank_start]lower[blank_end] innervation number and therefore produce [blank_start]less[blank_end] force.
Answer
-
Small
-
Large
-
high
-
low
-
lower
-
higher
-
less
-
more
Question 29
Question
Spinal reflexes are [blank_start]involuntary[blank_end] and triggered by [blank_start]external stimuli[blank_end].
Despite classical theory they can be quite flexible.
Answer
-
involuntary
-
external stimuli
Question 30
Question
The withdrawal from a painful stimulus is called [blank_start]flexion-withdrawal[blank_end] reflex.
The [blank_start]flexor[blank_end] muscle is activated and the [blank_start]extensor[blank_end] muscle is inhibited.
This is called [blank_start]reciprocal innervation[blank_end].
The opposite effect happens on the [blank_start]contralateral[blank_end] limb.
The force [blank_start]does[blank_end] (does or does not) depend on the stimulus intensity.
Answer
-
flexion-withdrawal
-
flexor
-
extensor
-
reciprocal innervation
-
contralateral
-
does
Question 31
Question
The stretch reflex is a [blank_start]muscle contraction[blank_end] in response to stretching within the muscle.
The antagonist muscle is inhibited, this is called [blank_start]reciprocal innervation[blank_end].
The stretch reflex increases the [blank_start]stiffness[blank_end] of the muscle.
Answer
-
stiffness
-
muscle contraction
-
reciprocal innervation
Question 32
Question
The areas of the cerebral cortex that are used in motor control:
- [blank_start]Primary motor cortex[blank_end] (M1)
- [blank_start]Premotor cortex[blank_end] (PM)
- [blank_start]Supplementary motor area[blank_end] (SMA)
Answer
-
Primary motor cortex
-
Premotor cortex
-
Supplementary motor area
Question 33
Question
The motor cortices receive input from
Answer
-
the somatosensory cortex
-
the posterior parietal cortex
-
the temporal lobe
-
the cerebellum
Question 34
Question
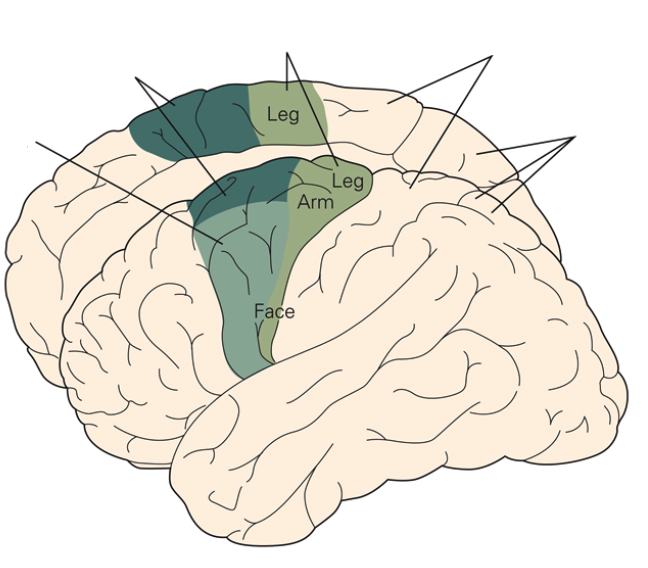
The motor homunculus is most detailed for the [blank_start]primary motor cortex[blank_end].
It disappears if you [blank_start]zoom on[blank_end].
Answer
-
primary motor cortex
-
premotor cortex
-
supplementary motor area
-
zoom in
-
zoom out
Question 35
Question
The motor pathway to lateral motorneurons runs [blank_start]contralateral[blank_end] and controls mainly [blank_start]distal muscles[blank_end].
It includes the [blank_start]corticospinal tract[blank_end].
The patway to medial motorneurons runs [blank_start]ipsilateral[blank_end] and controls mainly [blank_start]stance and posture[blank_end].
Answer
-
contralateral
-
ipsilateral
-
distal muscles
-
nearby muscles
-
corticospinal tract
-
medial tract
-
ipsilateral
-
contralateral
-
stance and posture
-
fine movements
-
unconscious movements
Question 36
Question
The corticospinal tract
The connections come from the cortical layer [blank_start]V[blank_end].
Many of these connections terminate on spinal [blank_start]interneurons[blank_end].
Only [blank_start]M1[blank_end] contains neurons projecting directly to spinal motor neurons. These cortical neurons are called [blank_start]corticomotorneurons[blank_end]. Those neurons have only one synapse.
Answer
-
V
-
IV
-
III
-
II
-
I
-
interneurons
-
medial neurons
-
projection neurons
-
M1
-
PM
-
SMA
-
corticomotorneurons
-
complex neurons
Question 37
Question
The axons of corticomotorneurons terminate on [blank_start]spinal motor neurons[blank_end].
The can also influence other muscles via spinal [blank_start]interneurons[blank_end].
Most of the time the excite agonist muscles and inhibit antagonist ones.
Answer
-
spinal motor neurons
-
the muscle fiber
-
interneurons
-
projection neurons
-
receptors
Question 38
Question
Reading information about the direction of a movement from several motor neurons is done via [blank_start]population codes[blank_end].
Answer
-
population codes
Question 39
Question
Neuronal tuning with respect to movement means
Answer
-
that firing rates of cortical motor neurons correlate with parameters of movement, e.g. direction, velocity, acceleration, ...
-
that reinforcement learning can be applied to fine-tune execution of motor tasks.
-
that firing rates of cortical motor neurons are highly intercorrelated ("tuning each other")
Question 40
Question
Different digits of the hand are controlled by sharply separated areas in M1.
Answer
- True
- False
Question 41
Question
Four symptoms of cerebellar disorders:
[blank_start]Hypotonia[blank_end]: A diminished resistance to passive limb displacements.
[blank_start]Astasia-abasia[blank_end]: An inability to stand or walk.
[blank_start]Ataxia[blank_end]: The abnormal execution of multijointed voluntary movements, characterized by lack of coordination.
[blank_start]Action tremor[blank_end]: A form of tremor at the end of a movement, when the patient attempts to stop the movement by using antagonist muscles.
Answer
-
Hypotonia
-
Astasia-abasia
-
Ataxia
-
Action tremor
Question 42
Question
The basal ganglia are involved in
Answer
-
reinforcement motor learning
-
action selection
-
movement initiation
-
online motor control
Question 43
Question
Relation between function and areas of the brain (hypothesis)
Image:
Image (binary/octet-stream)
{kind=link}
Answer
-
basal ganglia
-
motor cortex
-
parietal cortex
-
cerebellum
-
thalamus
-
prefrontal cortex
-
medulla oblongata
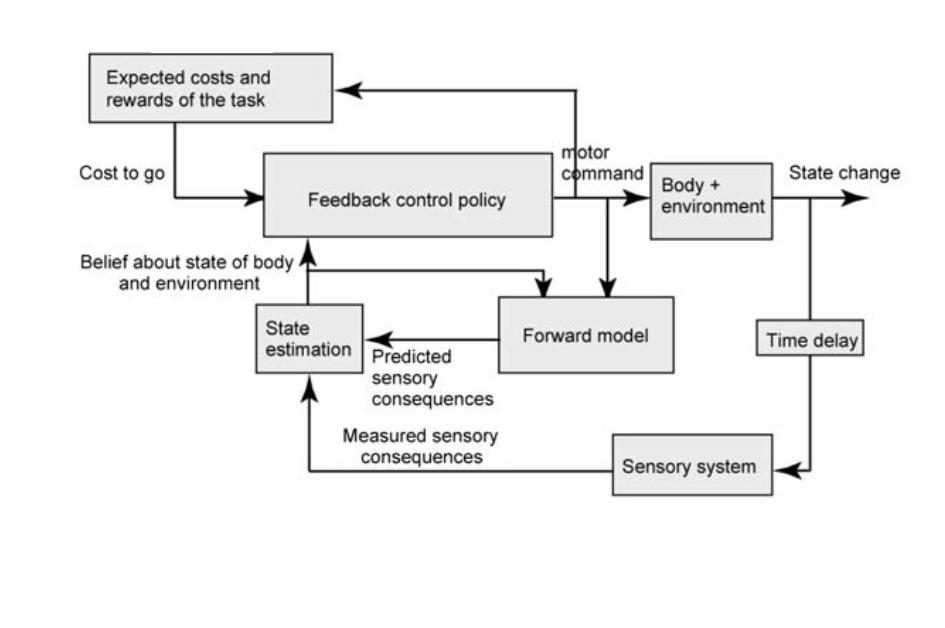
Question 44
{kind=link}
Answer
-
controller
-
state estimation
-
efference copy
-
sensory feedback
-
forward model
-
inverse model
-
gain
Question 45
{kind=link}
Answer
-
Comparator
-
Sensed state
-
Input processing
-
Sensor
-
Forward model
-
Inverse model
-
Estimated state
Question 46
{kind=link}
Answer
-
dynamic
-
predictive
-
sensory
-
correction
-
estimation
-
gain
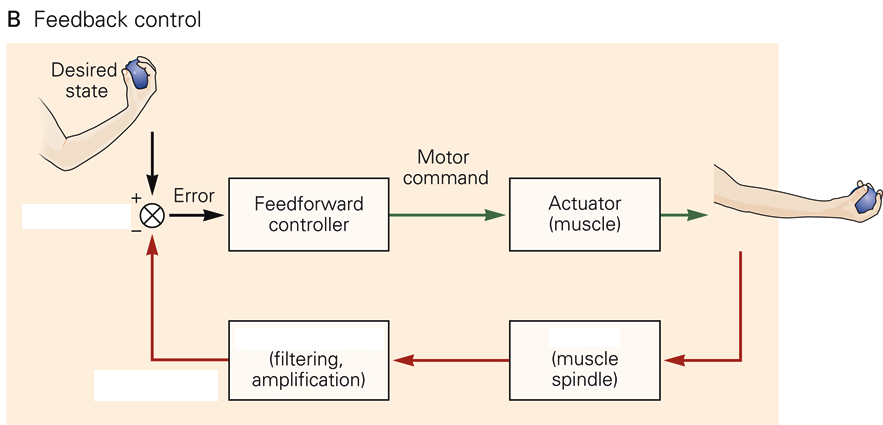
Question 47
{kind=link}
Answer
-
Desired state
-
Estimated state
-
Feedforward controller
-
Inverse controller
-
Motor command
-
State estimation
-
Actuator
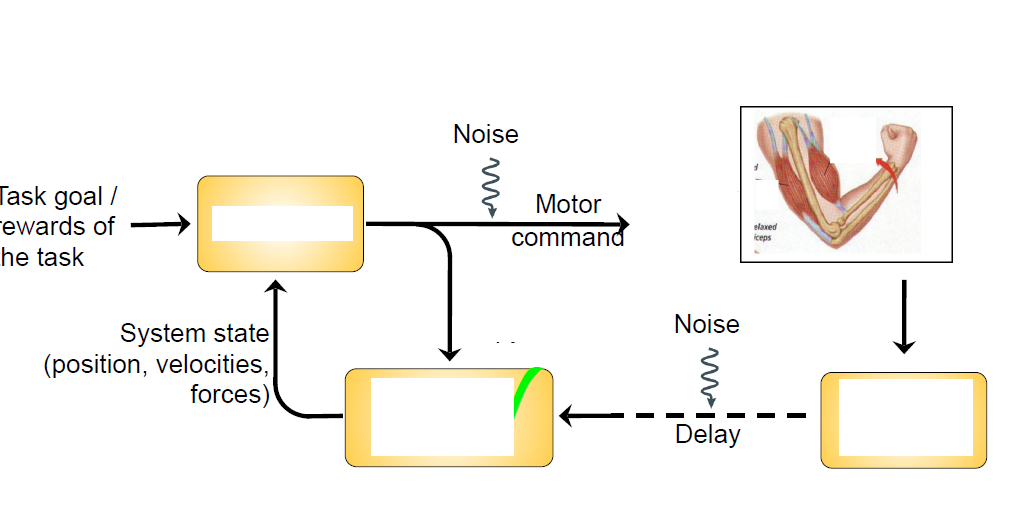
Question 48
{kind=link}
Answer
-
position
-
weight
-
motor command
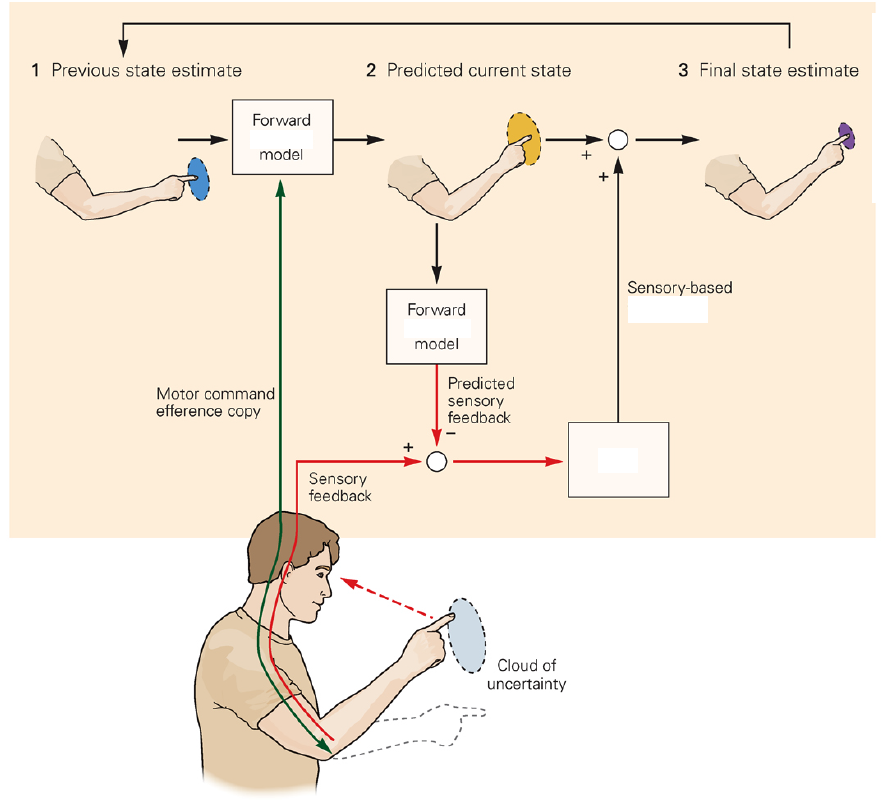
Question 49
{kind=link}
Answer
-
Motor command
-
Sensory feedback and proprioception
-
State transition
-
State estimation
-
Forward model
-
Inverse model
-
Gain factor
Question 50
Question
The forward-model is used at the [blank_start]beginning[blank_end] of movements.
Answer
-
beginning
-
end
Question 51
Question
There are slow- and fast-[blank_start]twitch[blank_end] muscle fibers.
Answer
-
twitch
Question 52
Question
[blank_start]Supraspinal[blank_end] centers play an important role in modulating and adapting spinal reflexes, even to the extent of reversing movements when appropriate.
Answer
-
Supraspinal
Question 53
Question
Stretch reflex:
In addition to the muscle that is stretched [blank_start]synergistic[blank_end] muscles are contracted.
Answer
-
synergistic
Question 54
Question
M1: Brodman [blank_start]4[blank_end]
PM & SMA: Brodman [blank_start]6[blank_end]
Answer
-
4
-
6
Question 55
{kind=link}
Answer
-
Posterior parietal cortex
-
Primary somatosensory cortex
-
Primary motor cortex
-
Premotor cortex
-
Supplementary motor area
Want to create your own Quizzes for free with GoConqr? Learn more.