15630998
Descripción
Test por John Balusman, actualizado hace más de 1 año
|
|
Creado por John Balusman
hace más de 5 años
|
|
Pregunta 1
Pregunta
¿Qué parámetros obtendremos mediante la calibración extrínseca de una cámara?
Respuesta
-
Una matriz de rotación y un vector de traslación.
-
Solo las distancias focales y el centro de proyección.
-
Las distancias focales, el centro de proyección y los parámetros de distorsión geométrica.
-
No responder.
Pregunta 2
Pregunta
¿Cuáles son los parámetros “ extrínsecos ” obtenidos por calibración?
Respuesta
-
Un vector de rotación y otro de traslación
-
Las distancias focales y el centro de proyección.
-
Las distancias focales, el vector de rotación y el vector de traslación.
-
No responder.
Pregunta 3
Pregunta
¿Cuáles son los parámetros “ intrínsecos ” obtenidos por calibración?
Respuesta
-
Las distancias focales, el vector de rotación y el vector de traslación.
-
Un vector de rotación y otro de traslación.
-
Las distancias focales y el centro de proyección.
-
No responder.
Pregunta 4
Pregunta
Por calibración intrínseca de una cámara se entiende:
Respuesta
-
El proceso por el que podemos relacionar un punto 3D en un sistema de referencia situado en la cámara con puntos del plano imagen.
-
El proceso por el que pondremos relacionar un punto en un sistema 3D de referencia arbitrario con puntos del plano imagen.
-
El proceso por el que podremos relacionar un punto en un sistema 3D de referencia arbitrario con puntos en un sistema 3D situado en la cámara
-
No contestar.
-
Ninguna es correcta.
Pregunta 5
Pregunta
Por calibración extrínseca de una cámara se entiende:
Respuesta
-
El proceso por el que podremos relacionar un punto en un sistema 3D de referencia arbitrario con puntos en un sistema 3D situado en la cámara
-
Ninguna
-
No responder.
-
El proceso por el que podemos relacionar un punto 3D en un sistema de referencia situado en la cámara con puntos del plano imagen.
-
El proceso por el que pondremos relacionar un punto en un sistema 3D de referencia arbitrario con puntos del plano imagen
Pregunta 6
Pregunta
¿Los parámetros que reflejan la “pose” son?
Respuesta
-
Parámetros extrínsecos
-
Ninguna
Pregunta 7
Pregunta
Para estimar “la pose” de la cámara a un sistema de referencias 3D arbitrario ¿que proceso realmente?
Respuesta
-
La calibración de los parámetros extrínsecos.
-
Necesitamos calibrar los parámetros intrínsecos y extrínsecos siempre.
-
La calibración de los parámetros intrínsecos.
-
No contestar.
Pregunta 8
Pregunta
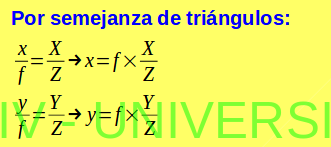
Según el modelo Pin-Hole. Un punto en coordenadas 3D P:(X,Y,Z), dónde se proyecta en la imagen si, la distancia focal es “f” :
Respuesta
-
p:(fX/Z, fY/Z)
-
p:(ZX/f, ZY/f)
-
p:(fZ/X, fZ/Y)
-
Ninguna
{kind=link}
Pregunta 9
Pregunta
En relación al modelo proyectivo "pin-hole”, las coordenadas homogéneas son utilizadas para simplificar su formulación.Dado un vector v:(1, 2, 3) cuál será su versión en coordenadas homogéneas:
Respuesta
-
V`:[1/3, 2/3]
-
V`:[1, 2, 3, 1]
-
V`:[1/(1+2+3), 2/(1+2+3), 3/(1+2+3)
-
V`:[1/(1+2+3), 2/(1+2+3), 3/(1+2+3), (1+2+3)
Pregunta 10
Pregunta
Para obtener los parámetros necesarios para aplicar el modelo proyectivo ”pin-hole” utilizamos un
proceso conocido como Calibración de la cámara. En relación a este proceso cuál de las siguientes
afirmaciones es correcta.
Respuesta
-
En general, se necesitarán más vistas distintas del patrón de calibración para obtener los parámetros intrínsecos que para obtener los parámetros extrínsecos.
-
Los parámetros extrínsecos explican cómo proyectar un punto 3D en el plano imagen.
-
En general, se necesitaran mas vistas distintas del patron de calibracion para obtener los parámetros extrínsecos que para obtener los parámetros intrínsecos.
-
Los parámetros intrínsecos explican cómo representar un punto 3D en un sistema de coordenadas 3D arbitrario en el sistema de coordenadas 3D de la cámara.
Pregunta 11
Pregunta
Las coordenadas homogéneas es un método matemático para:
Respuesta
-
Obtener la distancia en espacios euclidianos.
-
Colectores compactos.
-
Medir distancias en espacios geodésicos como rotaciones.
-
Representar operaciones lineales que pueden ser compactadas por adelantado
Pregunta 12
Pregunta
Un conjunto de transformaciones, como rotaciones en 3D y traslaciones, puede ser precalculado en una sola matriz de 4x4.
Respuesta
-
Verdadero
-
Falso
-
No contestar.
Pregunta 13
Pregunta
El modelo de"pin-hole":
Respuesta
-
Representar la ubicación de la cámara en un sistema de referencia arbitrario.
-
Representa la cámara ideal sin distorsión.
-
Modelar la rotación de los rodrigues.
Pregunta 14
Pregunta
Los parámetros intrínsecos:
Respuesta
-
Cambian cada vez que la cámara se mueve.
-
Nunca cambia.
-
Cambia cada vez que la cámara toma una foto.
-
Cambia solo si reemplazamos la lente.
Pregunta 15
Pregunta
Los parámetros extrínsecos:
Respuesta
-
Nunca cambian.
-
Cambia cada vez que cambia la iluminación
-
Representa la ubicación de la cámara con respecto a un sistema de referencia arbitrario.
-
Representa el intervalo de confianza de la cámara.
Pregunta 16
Pregunta
En relación al sistema tradicional de “par estéreo” para recuperar el 3D de la escena, en general, los
algoritmos que buscan la correspondencia de un punto en una imagen en su par-estéreo funcionara
mejor si:
Respuesta
-
Si el parche visual que contiene al punto tiene una distribución de valores muy variada
-
No contestar
-
Si el parche visual que contiene al punto tiene una distribución de valores muy parecida al valor del punto.
Pregunta 17
Pregunta
En relación al sistema tradicional de “par estéreo” para recuperar el 3D de la escena, que entendemos
por el proceso de Rectificación?
Respuesta
-
Al proceso que transforman las imágenes derecha e izquierdas, para obtener sus correspondientes imágenes coplanares y alineadas.
-
Al proceso por el cual son obtenidos los parámetros necesarios para transformar las coordenadas de un punto 3D visto desde una cámara a la recta 3D que contiene a este punto visto desde la otra cámara.
-
Al proceso por el cual son obtenidos los parámetros necesarios para transformar las coordenadas 2D de la imagen de un punto 3D en el plano imagen de una de las cámaras, a la recta 2D en el plano imagen de la otra cámara que contendrá la imagen del mismo punto 3D.
-
Al proceso por el cual, son obtenidos los parámetros necesarios para proyectar un punto 3D de la escena en cada una de las dos cámaras que forma el par estéreo.
-
No contestar.
Pregunta 18
Pregunta
En relación al sistema tradicional de “par estéreo” para recuperar el 3D de la escena, ¿dónde se proporciona mayor resolución a la hora de medir la profundidad?
Respuesta
-
En las distancias cortas
-
No contestar
-
En las distancias largas
-
A partir de la distancia mínima de trabajo, la resolución en la medición de la profundidad es similar en el rango de distancias de trabajo.
Pregunta 19
Pregunta
En relación al sistema tradicional de “par estéreo” para recuperar el 3D de la escena, cuál de las
siguientes afirmaciones es la correcta.
Respuesta
-
Suelen tener una “línea base” corta para conseguir que las imágenes derecha e izquierda sean muy diferente.
-
Suelen tener una “línea base” corta para conseguir que las imágenes derecha e izquierda no sean muy diferente.
-
Suelen tener una “línea base” larga para conseguir que las imágenes derecha e izquierda sean muy diferente.
-
Suelen tener una “línea base” larga para conseguir que las imágenes derecha e izquierda sean muy diferente.
-
No contestar.
-
Ninguna de las otras es correcta
Pregunta 20
Pregunta
En un sistema 3D formado por un par estéreo, ¿qué relación tiene la discrepancia entre correspondencias
y la profundidad?
Respuesta
-
A mayor discrepancia, menor profundidad.
-
La discrepancia no afecta a la profundidad.
-
A mayor discrepancia, mayor profundidad.
-
No contestar.
Pregunta 21
Pregunta
Calibrar una cámara es un proceso para:
Respuesta
-
Obtener los parámetros intrínsecos de la cámara.
-
Obtener la rotación de la cámara
-
Obtener la respuesta de la cámara a los cambios de iluminación.
-
Obtener la traducción de la cámara
Pregunta 22
Pregunta
Perspectiva-N-Point es el problema de:
Respuesta
-
Estimación de los parámetros intrínsecos de la cámara
-
Calibrar la cámara.
-
Girando la cámara alrededor de su eje
-
Encontrar la cámara extrínseca a partir de un conjunto de puntos 3D conocidos y sus proyecciones 2D
Pregunta 23
Pregunta
La representación de Rodrigues.
Respuesta
-
Permite expresar rotaciones como un vector de 3 componentes.
-
Es una medida del error de calibración.
-
Determina la ubicación completa de la cámara en el espacio.
-
Es una matriz 4x4 que puede transformar un punto 3D entre sistemas de referencia.
Pregunta 24
Pregunta
¿Cuál de las siguientes técnicas para obtener el 3D, genera un volumen 3D aproximado de la escena
denominado “visual-hull”?
Respuesta
-
Luz estructurada
-
Shape from Silhouette
-
Par estéreo.
-
No contestar.
Pregunta 25
Pregunta
Cual de las siguientes técnicas para obtener el 3D suele utilizar más de dos vistas de la escena:
Respuesta
-
Shape from Silhouette
-
No contesta
-
Par estéreo
-
Luz estructurada
Pregunta 26
Pregunta
¿Cuál de las siguientes técnicas para obtener el 3D utiliza un proceso llamado “Rectificación”?
Respuesta
-
Par estéreo
-
Luz estructurada.
-
Shape from Silhouette.
-
No contestar.
Pregunta 27
Pregunta
¿Cuál de las siguientes técnicas para obtener el 3D utiliza un patrón de iluminación denominado
“Gray Code”?
Respuesta
-
Luz estructurada
-
No contestar
-
Par estéreo
-
Shape from Silhouette
Pregunta 28
Pregunta
Comparando a las técnicas para reconstruir la escena 3D “luz estructurada utilizando grey codes” y
“estereo-visión”, ¿cuál de las siguientes afirmaciones es la correcta?
Respuesta
-
La “luz estructurada” aumenta la velocidad de proceso, a costa de perder resolución en la profundidad.
-
La “Luz estructurada” simplifica el problema de la correspondencia entre pares
-
Ninguna es correcta.
Pregunta 29
Pregunta
Dada la proyección de un punto en una cámara, su proyección en otra cámara.Seleccione una:
Respuesta
-
Se puede determinar incluso si la posición 3D del punto es desconocida.
-
Puede ser determinado por los instrumentos de la segunda cámara.
-
Es inversamente proporcional a la distancia del epipolo.
-
Se encuentra a lo largo de una línea llamada línea epipolar.
Pregunta 30
Pregunta
En visión estéreo, los partidos se buscan en la imagen correcta por:
Respuesta
-
Comparando pequeños parches de ventana a lo largo de la línea epipolar
-
Detección de puntos clave
-
Utilizando un descriptor HOG
-
Usando una representación epipolar de la imagen correcta.
Pregunta 31
Pregunta
Es un método de reconstrucción 3d:
Respuesta
-
Usando dos proyectores y una cámara.
-
Usando dos cámaras solamente.
-
Usando una cámara y un proyector.
-
Usando un proyector y un descriptor HOG.
Pregunta 32
Pregunta
Para estimar la ubicación 3d de un punto:
Respuesta
-
Es necesario conocer sus proyecciones en al menos dos imágenes y los parámetros intrínsecos y extrínsecos de la cámara.
-
Es necesario conocer sus proyecciones en al menos dos imágenes y los parámetros intrínsecos de la cámara.
-
Es necesario conocer sus proyecciones en al menos tres imágenes y los parámetros extrínsecos de la cámara.
-
Es necesario conocer sus proyecciones en al menos una imagen y los parámetros intrínsecos de la cámara.
Pregunta 33
Pregunta
Para estimar la "pose" de la cámara respecto a un sistema de referencias 3D arbitrario ¿que proceso realizaremos?
Respuesta
-
La calibración de los parámetros extrínsecos.
-
La calibración de los parámetros intrínsecos.
-
Necesitamos calibrar los parámetros intrínsecos y extrínsecos siempre.
-
No contestar.
Pregunta 34
Pregunta
El modelo de pin-hole sirve para saber:
Respuesta
-
Donde se proyecta un punto 3D en un sistema de referencias situado en la cámara.
-
Donde se proyecta un punto 2D en el plano sensor.
-
Donde se proyecta un punto 3D en un sistema de referencias NO situado en la cámara.
-
No responder.
Pregunta 35
Pregunta
El modelo de lente fina, define un modelo con un tipo de proyección:
Respuesta
-
Ortogonal
-
Proyectivo
-
Ninguna
-
No contestar.
Pregunta 36
Pregunta
Los sistemas de iluminacion con luz estrucutrada son utilizados principalmente para:
Respuesta
-
Resaltar textura de la superficie.
-
Para facilitar la recuperacion de la información 3D de la escena.
-
Detectar pequeños resaltes en la superficie.
-
Iluminar de forma homogenea la superficie.
Pregunta 37
Pregunta
Por la calibración extrínseca de una cámara se entiende:
Respuesta
-
El proceso por el que podremos relacionar un punto en un sistema 3D de referencia arbitrario con puntos en un sistema 3D situado en la cámara.
-
El proceso por el que podremos relacionar un punto en un sistema 3D de referencia arbitrario con puntos del plano imagen.
-
Ninguna es correcta.
-
El proceso por el que podremos relacionar un punto 3D en un sistema de referencia situado en la cámara con puntos en el plano imagen.
Pregunta 38
Pregunta
¿Cuántas imágenes del patrón de calibración se necesitan para realizar una calibración extrínseca de una cámara?
Respuesta
-
1
-
2
-
3
¿Quieres crear tus propios Tests gratis con GoConqr? Más información.