3057496
Descripción
Fichas por tahoeyandres, actualizado hace más de 1 año
|
|
Creado por tahoeyandres
hace más de 10 años
|
|
| Pregunta | Respuesta |
| que es la robótica:La robótica es la ciencia o rama de la ciencia que se ocupa del estudio, desarrollo y aplicaciones de los robots. | Los robots son dispositivos compuestos de sensores que reciben datos de entrada y que pueden estar conectados a la computadora. Esta, al recibir la información de entrada, ordena al robot que efectúe una determinada acción. muchos robots tienen diferentes trabjajos como el de ayudar al gobiarno a combatir |
| como funciona un robot? Los robots tienen un cerebro que puede ser un microcontrolador por ejemplo el cual controla los motores que son los encargados de generar el moviemiento. Espero te haya aclarado un poco. tambien puden tener chips especiales que ofrecen diferentes acciones para que el robot las cumpla como ayudar | |
| Morfología del robot: el robot tien componentes especiales para que funcionen: Estructura Mecánica transmisiones Sistema de Accionamiento Sistema Sensorial Sistema de Control Elementos Terminales | |
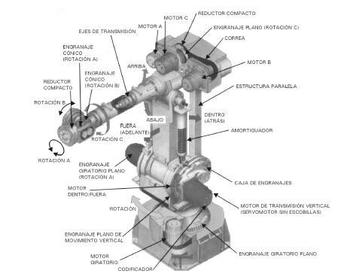
| Transmisiones: Dado que un robot mueve su extremo con aceleraciones elevadas, es sumamente importante reducir al máximo su momento de inercia. Del mismo modo, los pares estáticos que deben vencer los actuadores dependen directamente de la distancia que existen entre las masas y el actuador. | Debe tener un tamaño y peso reducido · Se ha de evitar que presente juegos u holguras considerables · Se deben buscar transmisiones con gran rendimiento |
| https://docs.google.com/document/d/1I9uOJwWsVGxexJ2r1r0zd-bAU7aExF3Y6xt6gdcL-Vo/edit?usp=sharing | Accionamiento Directo: Como se ha indicado anteriormente, desde hace un tiempo que existen robots que poseen ‘accionamiento directo’ (Direct Drive DD), en que el eje del actuador se conecta directamente a la carga o articulación, sin la utilización de un reductor intermedio. Este término suele utilizarse exclusivamente para robots con accionamiento eléctrico. Este tipo de accionamiento aparece debido la necesidad de utilizar robots en aplicaciones que exigen combinar gran precisión con alta velocidad. Los reductores introducen una serie de efectos negativos, como son el juego angular, rozamiento o disminución de la rigidez del accionador, que pueden impedir alcanzar los valores de precisión y velocidad requeridos. |
| · Posicionamiento rápido y preciso, pues se evitan los rozamientos y juegos de las transmisiones y reductores · Aumento de las posibilidades de controlabilidad del sistema a costa de una mayor complejidad · Simplificación del sistema mecánico al eliminarse el reductor | Sistema Sensorial del Robot La clave de esta adaptación de los robots a un entorno y trabajos cambiantes la tiene la utilización de captadores en la estructura del robot y son precisamente todos estos captadores los que conforman el sistema sensorial del robot. Desde los comienzos de la robótica , los robots han ido evolucionando en su nivel de complejidad, derivando de todo ello un proceso de clasificación de los mismos. Esta evolución en la complejidad de construcción de los robots, es consecuencia directa de la necesidad cada vez mayor de adaptar uno de estos mecanismos a la realización de diversas tareas, siendo estas tareas cada vez más complejas. De esta manera, los robots han pasado de realizar tareas repetitivas y sencillas, ha realizar funciones cada vez más complejas, donde los procesos a realizar no pueden ser repetitivos, ya que se encuentran sujetos a variaciones externas. |
| Sensores lineales de posición (LVDT e Inductosyn): Entre los sensores de posición lineales destaca el transformador diferencial de variación lineal (LVDT) debido a su casi infinita resolución, poco rozamiento y alta repetibilidad. | Sensores de velocidad: La captación de la velocidad se hace necesaria para mejorar el comportamiento dinámico de los actuadotes del robot. La información de la velocidad de movimiento de cada actuador (que tras el reductor es la giro de la articulación) se realimenta normalmente a un bucle de control analógico implementado en el propio accionador del elemento motor |
| Sensores de presencia: Este tipo de sensor es capaz de detectar la presencia de un objeto dentro de un radio de acción determinado. Esta detección puede hacerse con o sin contacto con el objeto. | ELEMENTOS TERMINALES Los elementos terminales, también llamados efectores finales (end effector) son los encargados de interaccionar directamente con el entorno del robot. Pueden ser tanto elementos de aprehensión como herramientas. Si bien un mismo robot industrial es, dentro de unos límites lógicos, versátil y readaptable a una gran variedad de aplicaciones, no ocurre así con los elementos terminales, que son en muchos casos específicamente diseñados para cada tipo de trabajo. |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
¿Quieres crear tus propias Fichas gratiscon GoConqr? Más información.