32395170
Descripción
Fichas por MIGUEL BRUNO Neves dE ALMEIDA, actualizado hace más de 1 año
|
|
Creado por MIGUEL BRUNO Neves dE ALMEIDA
hace alrededor de 3 años
|
|
| Pregunta | Respuesta |
| Sensor ultrassônico: Medir distancias e detectar objetos a sua frente utilizando ondas sonoras emitidas. Essas ondas ricocheteiam em uma superfície e, baseado na velocidade do som e tempo de retorno, calcula distancias | |
| Sensor de toque: Normalmente posicionado na parte dianteira de um robô pode ser precionado ou liberado determinando os momentos que deve parar e se deslocar | |
| Sensor de cor: Emite uma luz e, baseado na radiação refletida, calculam as coordenadas de cromaticidade e relacionam com os valores de referência cromáticos previamente armazenados identificando a cor. | |
| Sensor de giro: Detecta o movimento rotacional em um unico eixo, por exemplo, quando uma peça do robô está girando, ou quando ele está em queda. | |
| Bateria: Desenvolve tensão a partir da reação química de dois materiais desiguais tais como as placas positiva e negativa imergidas em solução de ácido sulfúrico e água. Armazena eletricidade para ser usada no futuro. | |
| Motor médio Ev3: Inclui um Sensor de Rotação menor e mais leve que o Motor Grande. Pode ser programado para ligar ou desligar, controlar o nível de força, ou para funcionar por um período determinado de tempo ou de rotações. | |
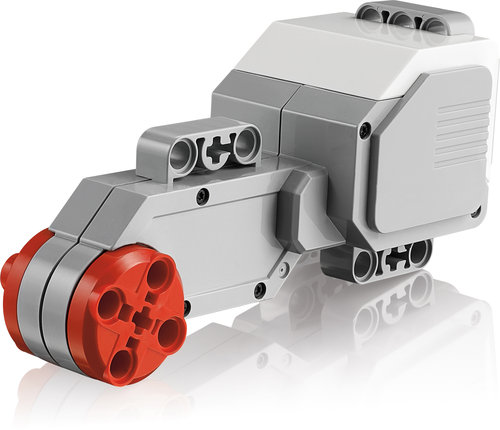
| Motor grande EV3: Serve para a movimentação do robô. Usando o sensor de rotação embutido, pode se alinhar com outros motores do robô para que ele possa andar em uma linha reta na mesma velocidade. | |
| Bloco Ev3: Computador programável que, utilizando o software de programação e registro de dados, torna possivel monitorar motores e coletar feedback dos sensores utilizando o software de programação e registro de dados. |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
¿Quieres crear tus propias Fichas gratiscon GoConqr? Más información.