4258617
Descripción
Fichas por Luke Hansford, actualizado hace más de 1 año
|
|
Creado por Luke Hansford
hace alrededor de 10 años
|
|
| Pregunta | Respuesta |
| What factors affect AOCS? | Orbit Assumption External Body masses External Space Environment Internal |
| What assumptions are made during Keplerian orbit theory? | - Newtonian gravitation - Point masses, or equivalently, spherically symmetric mass distributions. - Two bodies - No other forces apart from gravitation |
| How are some of these assumptions not correct? | There are non-Keplerian forces - Small perturbations to Keplerian motion (orbital elements change slowly with time) -Instantaneous impulsive transfer (analysis is treated in a similar way to the orbit transfers considered earlier. |
| When do these assumptions break down? | When they are similar to Newtonian forces (e.g. upon re-entry) Periodic with period comparable to the natural motion |
| What external body mass factors affect AOCS? | Non-sphericity of Earth (or other attracting body) The moon and Sun gravitation Other solar bodies |
| What external space effects affect AOCS? | Interaction with magnetic field Aerodynamic drag of residual atmosphere Solar radiation pressure |
| What internal effects affect AOCS? | Satellite inertia Operation of mechanisms |
| What are the main factors considered? | Non-sphericity of Earth Lunar-Solar perturbations Aero drag Solar radiation pressure |
| What do each of these terms represent? | and V(r) is potential energy |
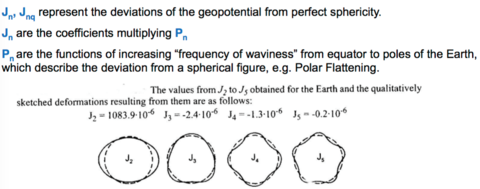
| How are Jn and Pn all related? | |
| How is the 'real' shape of the geopotentials obtained? | Summing the spherical harmonics from first order term (the point mass) to higher harmonics increasing in spatial detail of the earths mass distribution |
| What internal dynamic properties are needed to considered by the AOCS? | Main effects of the spacecraft mass properties and dynamic behaviour: Satellite Structure Moments of inertia Sloshing wheels |
| What is 'tail wagging of the dog'? | When large components are deployed in space possibly non-linear: solar panels, antennas... These exert an influence on the AOCS operation out of all proportion due to their dynamics being dominant or worse... unknown. |
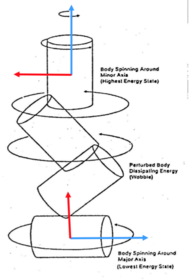
| Why is the ratio of principle moments of inertia very important? | Because the spacecraft will preferentially rotate about the axis with highest moment of inertia (the lowest energy state of the system) |
| If its rotating initially about some other axis and there is some energy loss mechanism (sloshing fuel or loose structure) what will happen? | It will tumble into its lower energy mode eventually |
| How are these effects countered by the AOCS? | Translation - by sensing deviation from desired orbit and controlling with thrusters Rotation - by sensing deviation from desired attitude and controlling with torque actuators. Both cases forces and torques required are very small and no attempt is made to directly counter them. |
| How is translation measured? | Generally done externally by with radar or optically although limited GPS possible for some orbits. |
| Why won't accelerometers on board NOT give us motion in a terrestrial airborne INS? | Gravity acts equally on spacecraft and accelerometer test mass. |
| What are the translation actuators? | Generally monopropellant thrusters although cold gas and electric ion thrusters are used. Thrust available is very limited (few N) |
| What is really important in terms of thrusters application? | That they are applied singly or in combination through the centre of gravity. |
| Why is true linear proportional control impossible? | Because most reaction devices operate on a minimum control impulse, or 'impulse bit' basis. |
| Where is translational control strategy usually controlled from and what is it applied to? | Manned ground station and changing the orbit using manoeuvres rather than changing the 3D motion of spacecraft. |
| If a change in apogee is required where is the change made? | Corrections for the apogee take place at the perigee and vis versa. |
| Manoeuvres at which point are preferable, apogee or perigee and why? | Apogee because a small change in velocity vector is required and so less fuel is used. |
| What constitutes a passive orbit controller? | When changes in orbit requirement can be satisfied using non-sphericity of the earth. - sun-synchronous polar orbits or Molniya orbits. |
| How are attitude measurements usually made? | Internally using optical instruments, measuring attitude with respect to Earths horizon or terminator (sunrise/sunset), moon, sun or other start |
| What are used for very accurate attitude control? | Start trackers with internal maps. |
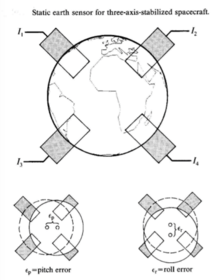
| What kind of attitude control sensor is this? | Static earth sensor for three axis stabilised spacecraft |
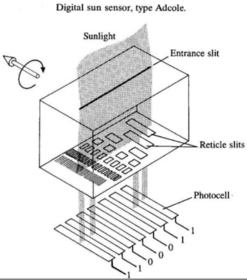
| What kind of attitude control sensor is this? | Digital sun sensor, type Adcole. |
| What methods can be used in order to control attitude? | Reaction thrusters creating torques, Gyroscopic devices (reaction wheels, momentum wheels |
| How do reaction thrusters work? | Control torques provided by thrusters, usually the same devices use for translation, operated in equal and opposed pairs to provide torque but no net force. |
| How do reaction wheels work? | Flywheels which can be rotated in one direction or the other, the reaction changing the attitude of the spacecraft. The nominal rate being zero |
| What is the disadvantage of using reaction wheels? | Requires a mechanism to start and stop. |
| How do momentum wheels work? | Flywheels which rotate at a nominal fixed rate, this is changed (up/down) within its operational r.p.m band and the reaction speed change changes attitude. Don't require mechanisms |
| What is the disadvantage of using momentum wheels? | They possess gyroscopic stiffness which creates cross coupling into multi axis control systems |
| Both gyroscopic wheels create disturbing torques in one direction, what needs to be done to correct it and how? | Thrusters are used to rebus the reaction wheels back to zero or momentum wheels back to its nominal rate r.p.m. |
| How are gyroscopic wheels preferable over thrusters? | No impulse bit with linear control relatively simple through gyro devices. |
| In all three devices there must be enough devices for 3 axis control, this means 3 perpendicular reaction wheels, why is a fourth wheel added? | To control angular velocity components in all 3 principle axis for redundancy |
| How do magnetorquers control attitude? | The spacecraft, usually axisymmetric is provided with a a multi turn coil, through which a current can't be switched in either sense on order to provide magnetic dipole moment μ which interacts with the planetary magnetic field B to provide an attitude changing torque of μxB. |
| What are the advantages of magnetorques? | No fuel! |
| What are the disadvantages of magnetorques | Very complex Unreliable in electrical system Requires accurate magnetic field model to exist for precise control, which is not easy during periods of solar activity. |
| How can a spacecraft be spin stabilised? | By using the spacecraft as a gyroscope, it will resist attitude changes due to gyroscopic stiffness - the resulting precession may be tolerable for the particular application. The attitude must then be changed by first inducting controlled precession, and then negating it by opposed thruster torques (first in one direction then the other). |
| Which produces attitude change in this case the precession or the thrusters? | It is the precession that create the attitude change not the thrusters they merely turn it on/off |
| How can spin stabilised be useful? | Placing payload sensors on the spin axis or looking out sideways and using the spacecrafts rotation to scan the outside world, may be well suited to a particular application. |
| Dual spin stabilised concepts are useful when? | When a payload sensor needs to point in one direction the whole time. This retains the advantages of the spin stabilised config with the cost of some extra complexity and possible dynamic problems. |
| When is there cross coupling? | When the spacecraft is asymmetric or there are momentum wheels |
| Why are multi-axis control schemes not used? | Because everything happens very slowly and cross-coupling torques are just treated as independent perturbations. |
| When does a spacecraft experience a restoring force due to gravity? | When in a gravity field if the long axis deviates from the local vertical it will experience a restoring force. This is effectively the 'tidal force' raised by the gradient of the gravity field across it. |
| When can gravity gradient stabilisation be used as an effective ACS strategy in 2 axes? | When the long thing configuration and the plane pointing fit well with the application. The third axis is dealt with by a single reaction wheel. |
| How can AOCS become more complicated? | - when certain requirements for independent operations are required (radar pointing) - Different mission phases which may result in independent sets of sensor and control laws. |
| How can a GEO satellites AOCS be complicated? | Solar array pointed at sun Payload antennas pointed at Earth Slowly changing geometry (1° /day) |
| What is required for a GTO? | Independent control strategy because things happen much more rapidly and the geometric relationships change. |
| When does polar flattening occur? | Postive J2 Spherically symmetric mass distribution - with an added equatorial disk Results in an extra restoring force towards the equatorial plane in the z-direction |
| How is motion is z direction affected? | Period is decreased due to restoring force acceleration Times of traversal of equatorial plane are earlier (nodes longer fixed but regress backwards). |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
¿Quieres crear tus propias Fichas gratiscon GoConqr? Más información.