22055387
Las fuerzas y las máquinas simples
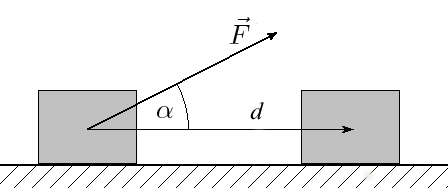
- El trabajo
- Requiere fuerza y desplazamiento
- Se mide en Julios (J)
- Los Julios son N*m
- Los Julios son N*m
- Su fórmula es W= F*d
- W es igual al trbajo, F a fuerza y d a distancia
- W es igual al trbajo, F a fuerza y d a distancia
- Requiere fuerza y desplazamiento
- Las máquinas
- Las máquinas nos ayudan
- Aumentan nuestra fuerza muscular
- Palanca, rueda, torno, polea y polipasto son
algunos ejemplos
- Palanca, rueda, torno, polea y polipasto son
algunos ejemplos
- Transmiten y transforman el
movimiento
- tornillo y engranajes son
algunos ejemplos
- tornillo y engranajes son
algunos ejemplos
- Aumentan nuestra fuerza muscular
- Máquinas simples
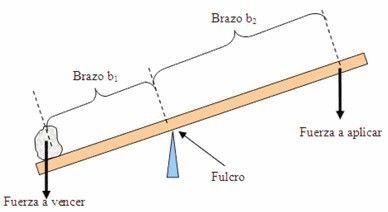
- Las palancas
- R*b(r) = F*b(f)
- R es la resistencia o fuerza a vencer
- F es la fuerza aplicada
- B es la distancia desde el fulcro a la resistencia b(r) o a la fuerza b(f)
- R es la resistencia o fuerza a vencer
- Partes
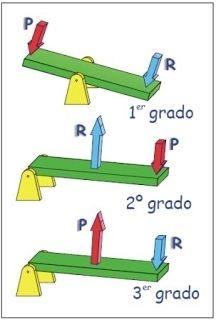
- Géneros
- 1º Género
- El fulcro entre R y F
- El fulcro entre R y F
- 2º
Género
- R entre el fulcro y F
- R entre el fulcro y F
- 3º
Género
- F ente el fulcro y R
- F ente el fulcro y R
- 1º Género
- R*b(r) = F*b(f)
- El plano inclinado y el tornillo
- A menor pendiente, mayor fuerza soporta el plano y más distancia hay que recorrer
- Se pueden doblar, curvar o enrollar
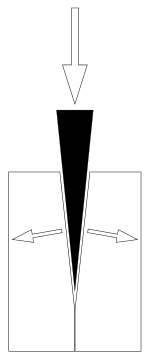
- Dos planos inclinados juntos forman una cuña
- A menor pendiente, más multiplica la cuña su fuerza y aumenta su distancia
- A menor pendiente, más multiplica la cuña su fuerza y aumenta su distancia
- Tornillos, clavos y pernos
- Tornillos
- Tienen cuña en su extremo y un plano inclinado enroscado alrededor de él
- Tienen cuña en su extremo y un plano inclinado enroscado alrededor de él
- Clavos
- Tienen una cuña en su extremo
- Tienen una cuña en su extremo
- Pernos
- Tienen un plano inclinado enroscado alrededor de él
- Tienen un plano inclinado enroscado alrededor de él
- Tornillos
- A menor pendiente, mayor fuerza soporta el plano y más distancia hay que recorrer
- Transmisión del movimiento
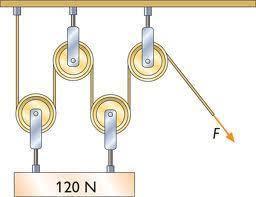
- Poleas y polipastos
- Su formúla es F1*r1=F2*r2
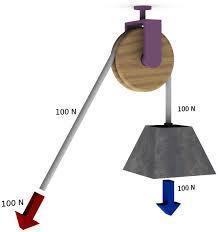
- Poleas
- La polea es una rueda con una hendidura en el borde por la que puede pasar una cuerda y se cuelga de un eje
- Una sola polea solo sirve para cambiar la dirección del movimiento, no modifica ni la fuerza ni la distancia
- La polea es una rueda con una hendidura en el borde por la que puede pasar una cuerda y se cuelga de un eje
- Polipastos
- Unión de varias poleas
- Cuántas más poleas, menor fuerza hay que hacer pero se recorre más distancia
- Por ejemplo, para levantar un peso con 4 poleas, recorrerás 4 veces más distancia pero harás 4 veces menos fuerza
- Por ejemplo, para levantar un peso con 4 poleas, recorrerás 4 veces más distancia pero harás 4 veces menos fuerza
- Unión de varias poleas
- Su formúla es F1*r1=F2*r2
- Engranaje
- Rueda dentada que encaja con otros engranajes y así transmiten el movimiento
- Su fórmula es F1*D1=F2*D2
- D es el número de dientes del engranaje y f la fueza
- D es el número de dientes del engranaje y f la fueza
- Rueda dentada que encaja con otros engranajes y así transmiten el movimiento
- Poleas y polipastos
- Transformación del movimiento
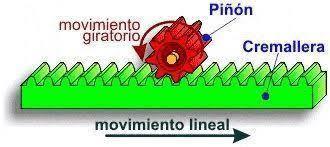
- Piñón-cremallera
- Una rueda dentada (piñón) mueve una barra dentada (cremallera)
- Transforma el movimiento de circular a lineal
- Una rueda dentada (piñón) mueve una barra dentada (cremallera)
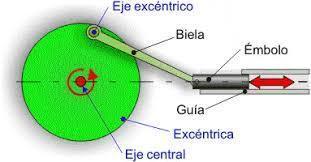
- Biela-manibela
- Una manivela o un pistón hace girar una biela, que empuja al émbolo. El movimiento puede hacerse en 2 direcciones
- Transforma el movimiento circualar a lineal
- Una manivela o un pistón hace girar una biela, que empuja al émbolo. El movimiento puede hacerse en 2 direcciones
- Piñón-cremallera
- Las palancas
- Máquinas compuestas
- Unión de 2 o más máquinas simples
- Permiten reducir la fuerza o la distancia mucho
- La reducción que hacen se calcula multiplicando la reducción que hacen cada una de las maquinas simples
- Por ejemplo, un gato (una unión de manivela y plano inclinado),
reducirá la fuerza necesaria para levantar algo 15 N (de la manivela)*
30 N (del plano inclinado)= 450 N
- Por ejemplo, un gato (una unión de manivela y plano inclinado),
reducirá la fuerza necesaria para levantar algo 15 N (de la manivela)*
30 N (del plano inclinado)= 450 N
- La reducción que hacen se calcula multiplicando la reducción que hacen cada una de las maquinas simples
- Unión de 2 o más máquinas simples
- Las máquinas nos ayudan
Recursos multimedia adjuntos
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
¿Quieres crear tus propios Mapas Mentales gratis con GoConqr? Más información.