23107604
Descripción
Mapa Mental por Gabriel Andre Quintanilla Paiz, actualizado hace más de 1 año
|
|
Creado por Gabriel Andre Quintanilla Paiz
hace más de 4 años
|
|
Las leyes de Newton
- Concepto: Las leyes de Newton, también
conocidas como leyes del movimiento de
Newton,1 son tres principios a partir de
los cuales se explican una gran parte de
los problemas planteados en mecánica
clásica, en particular aquellos relativos
al movimiento de los cuerpos, que
revolucionaron los conceptos básicos de
la física y el movimiento de los cuerpos
en el universo.
- Son tres leyes de
Newton las cuales
son:
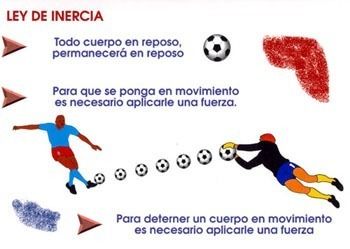
- Primera ley de
Newton (Ley de la
inercia)
- Esta ley postula, por tanto, que un cuerpo no puede
cambiar por sí solo su estado inicial, ya sea en reposo
o en movimiento rectilíneo uniforme, a menos que se
aplique una fuerza o una serie de fuerzas cuya
resultante no sea nula. Newton toma en
consideración, así, el que los cuerpos en movimiento
están sometidos constantemente a fuerzas de roce o
fricción, que los frena de forma progresiva, algo
novedoso respecto de concepciones anteriores que
entendían que el movimiento o la detención de un
cuerpo se debía exclusivamente a si se ejercía sobre
ellos una fuerza, pero nunca entendiendo como tal a
la fricción.
- Sistemas de
referencia iniciales
- La primera ley de Newton sirve para definir un tipo
especial de sistemas de referencia conocidos como
sistemas de referencia inerciales, que son aquellos
desde los que se observa que un cuerpo sobre el que
no actúa ninguna fuerza neta, se mueve con
velocidad constante. Un sistema de referencia con
aceleración (y la aceleración normal de un sistema
rotatorio se incluye en esta definición) no es un
sistema inercial, y la observación de una partícula
en reposo en el propio sistema no satisfará las leyes
de Newton (puesto que se observará aceleración sin
la presencia de fuerza neta alguna). Se denominan
sistemas de referencia no inerciales.
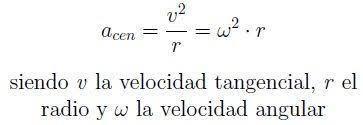
- Por ejemplo considérese una plataforma girando con velocidad
constante, ω, en la que un objeto está atado al eje de giro
mediante una cuerda, y supongamos dos observadores, uno
inercial externo a la plataforma y otro no inercial situado sobre
ella. Observador inercial: desde su punto de vista el bloque se
mueve en círculo con velocidad v y está acelerado hacia el
centro de la plataforma con una aceleración centrípeta . Esta
aceleración es consecuencia de la fuerza ejercida por la tensión
de la cuerda. Observador no inercial: para el observador que
gira con la plataforma el objeto está en reposo, a = 0. Es decir,
observa una fuerza ficticia que contrarresta la tensión para que
no haya aceleración centrípeta. Esa fuerza debe ser Este
observador siente la fuerza como si fuera perfectamente real,
aunque solo sea la consecuencia de la aceleración del sistema
de referencia en que se encuentra.
- En realidad, es imposible encontrar un sistema de
referencia inercial, ya que siempre hay algún tipo
de fuerzas actuando sobre los cuerpos; no obstante,
siempre es posible encontrar un sistema de
referencia en el que el problema que estemos
estudiando se pueda tratar como si estuviésemos
en un sistema inercial.
- En realidad, es imposible encontrar un sistema de
referencia inercial, ya que siempre hay algún tipo
de fuerzas actuando sobre los cuerpos; no obstante,
siempre es posible encontrar un sistema de
referencia en el que el problema que estemos
estudiando se pueda tratar como si estuviésemos
en un sistema inercial.
- Por ejemplo considérese una plataforma girando con velocidad
constante, ω, en la que un objeto está atado al eje de giro
mediante una cuerda, y supongamos dos observadores, uno
inercial externo a la plataforma y otro no inercial situado sobre
ella. Observador inercial: desde su punto de vista el bloque se
mueve en círculo con velocidad v y está acelerado hacia el
centro de la plataforma con una aceleración centrípeta . Esta
aceleración es consecuencia de la fuerza ejercida por la tensión
de la cuerda. Observador no inercial: para el observador que
gira con la plataforma el objeto está en reposo, a = 0. Es decir,
observa una fuerza ficticia que contrarresta la tensión para que
no haya aceleración centrípeta. Esa fuerza debe ser Este
observador siente la fuerza como si fuera perfectamente real,
aunque solo sea la consecuencia de la aceleración del sistema
de referencia en que se encuentra.
- La primera ley de Newton sirve para definir un tipo
especial de sistemas de referencia conocidos como
sistemas de referencia inerciales, que son aquellos
desde los que se observa que un cuerpo sobre el que
no actúa ninguna fuerza neta, se mueve con
velocidad constante. Un sistema de referencia con
aceleración (y la aceleración normal de un sistema
rotatorio se incluye en esta definición) no es un
sistema inercial, y la observación de una partícula
en reposo en el propio sistema no satisfará las leyes
de Newton (puesto que se observará aceleración sin
la presencia de fuerza neta alguna). Se denominan
sistemas de referencia no inerciales.
- Sistemas de
referencia iniciales
- Esta ley postula, por tanto, que un cuerpo no puede
cambiar por sí solo su estado inicial, ya sea en reposo
o en movimiento rectilíneo uniforme, a menos que se
aplique una fuerza o una serie de fuerzas cuya
resultante no sea nula. Newton toma en
consideración, así, el que los cuerpos en movimiento
están sometidos constantemente a fuerzas de roce o
fricción, que los frena de forma progresiva, algo
novedoso respecto de concepciones anteriores que
entendían que el movimiento o la detención de un
cuerpo se debía exclusivamente a si se ejercía sobre
ellos una fuerza, pero nunca entendiendo como tal a
la fricción.
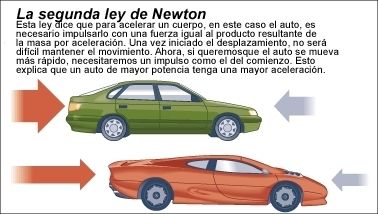
- Segunda ley de
Newton (Ley
funadamental de la
dinamica)
- Esta ley se encarga de cuantificar el concepto
de fuerza. La aceleración que adquiere un
cuerpo es proporcional a la fuerza neta
aplicada sobre el mismo. La constante de
proporcionalidad es la masa del cuerpo (que
puede ser o no ser constante). Entender la
fuerza como la causa del cambio de
movimiento y la proporcionalidad entre la
fuerza impresa y el cambio de la velocidad de
un cuerpo es la esencia de esta segunda ley.
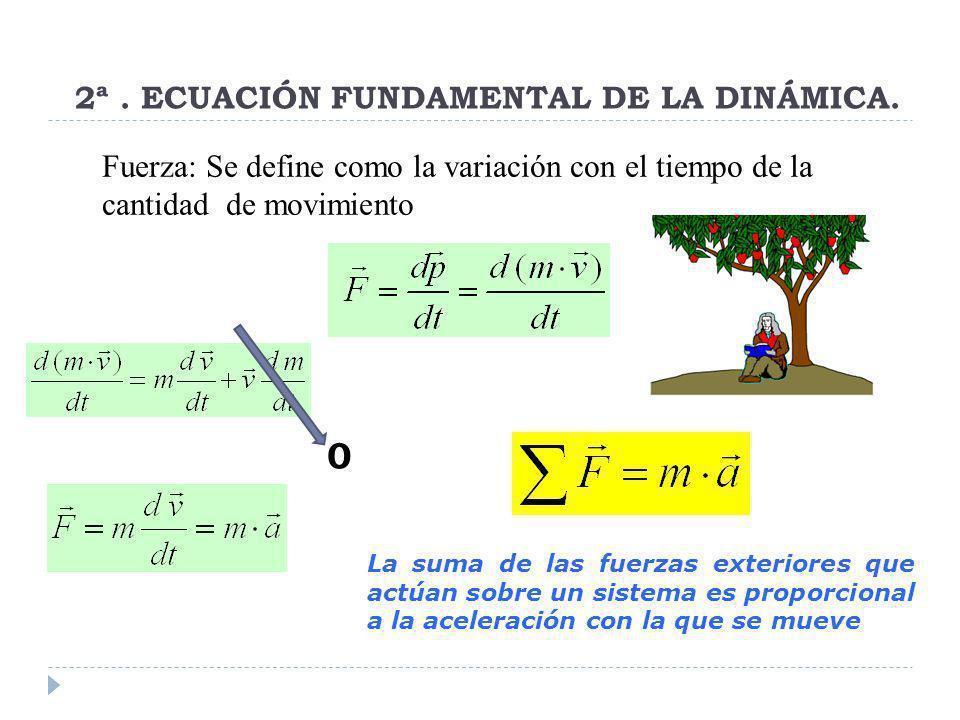
- Si la masa es constante Si la
masa del cuerpo es constante
se puede establecer la siguiente
relación, que constituye la
ecuación fundamental de la
dinámica:
- Donde m es la masa del cuerpo la
cual debe ser constante para ser
expresada de tal forma. La fuerza
neta que actúa sobre un cuerpo,
también llamada fuerza
resultante, es el vector suma de
todas las fuerzas que sobre él
actúan. Así pues:
- Donde m es la masa del cuerpo la
cual debe ser constante para ser
expresada de tal forma. La fuerza
neta que actúa sobre un cuerpo,
también llamada fuerza
resultante, es el vector suma de
todas las fuerzas que sobre él
actúan. Así pues:
- Si la masa es constante Si la
masa del cuerpo es constante
se puede establecer la siguiente
relación, que constituye la
ecuación fundamental de la
dinámica:
- Esta ley se encarga de cuantificar el concepto
de fuerza. La aceleración que adquiere un
cuerpo es proporcional a la fuerza neta
aplicada sobre el mismo. La constante de
proporcionalidad es la masa del cuerpo (que
puede ser o no ser constante). Entender la
fuerza como la causa del cambio de
movimiento y la proporcionalidad entre la
fuerza impresa y el cambio de la velocidad de
un cuerpo es la esencia de esta segunda ley.
- Tercera ley de Newton
(Principio de accion y
reaccion)
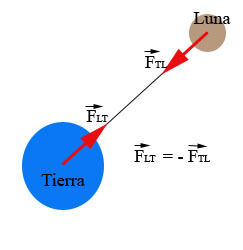
- La tercera ley de Newton establece que siempre que un
objeto ejerce una fuerza sobre un segundo objeto, este
ejerce una fuerza de igual magnitud y dirección pero en
sentido opuesto sobre el primero. Con frecuencia se
enuncia así: a cada acción siempre se opone una reacción
igual pero de sentido contrario. En cualquier interacción
hay un par de fuerzas de acción y reacción situadas en la
misma dirección con igual magnitud y sentidos opuestos. La
formulación original de Newton es: Actioni contrariam
semper & æqualem esse reactionem: sive corporum duorum
actiones in se mutuo semper esse æquales & in partes
contrarias dirigi. Con toda acción ocurre siempre una
reacción igual y contraria: quiere decir que las acciones
mutuas de dos cuerpos siempre son iguales y dirigidas en
sentido opuesto.
- Aplicaciones de la Tercera Ley de Newton: Algunos ejemplos donde
actúan las fuerzas acción-reacción son los siguientes:20 Si una persona
empuja a otra de peso similar, las dos se mueven con la misma
velocidad pero en sentido contrario. Cuando saltamos, empujamos a la
tierra hacia abajo, que no se mueve debido a su gran masa, y esta nos
empuja con la misma intensidad hacia arriba. Una persona que rema
en un bote empuja el agua con el remo en un sentido y el agua
responde empujando el bote en sentido opuesto. Cuando caminamos
empujamos a la tierra hacia atrás con nuestros pies, a lo que la tierra
responde empujándonos a nosotros hacia delante, haciendo que
avancemos. Cuando se dispara una bala, la explosión de la pólvora
ejerce una fuerza sobre la pistola (que es el retroceso que sufren las
armas de fuego al ser disparadas), la cual reacciona ejerciendo una
fuerza de igual intensidad pero en sentido contrario sobre la bala.
- Limitaciones y generalizaciones posteriores Después de que Newton
formulara las tres famosas leyes, numerosos físicos y matemáticos
hicieron contribuciones para darles una forma más general o de más fácil
aplicación a sistemas no inerciales o a sistemas con ligaduras. Una de
estas primeras generalizaciones fue el principio de d'Alembert de 1743
que era una forma válida para cuando existieran ligaduras que permitía
resolver las ecuaciones sin necesidad de calcular explícitamente el valor
de las reacciones asociadas a dichas ligaduras. Por la misma época,
Lagrange encontró una forma de las ecuaciones de movimiento válida
para cualquier sistema de referencia inercial o no-inercial sin necesidad
de introducir fuerzas ficticias. Ya que es un hecho conocido que las Leyes
de Newton, tal como fueron escritas, sólo son válidas a los sistemas de
referencia inerciales, o más precisamente, para aplicarlas a sistemas
no-inerciales, requieren la introducción de las llamadas fuerzas ficticias.
- Limitaciones y generalizaciones posteriores Después de que Newton
formulara las tres famosas leyes, numerosos físicos y matemáticos
hicieron contribuciones para darles una forma más general o de más fácil
aplicación a sistemas no inerciales o a sistemas con ligaduras. Una de
estas primeras generalizaciones fue el principio de d'Alembert de 1743
que era una forma válida para cuando existieran ligaduras que permitía
resolver las ecuaciones sin necesidad de calcular explícitamente el valor
de las reacciones asociadas a dichas ligaduras. Por la misma época,
Lagrange encontró una forma de las ecuaciones de movimiento válida
para cualquier sistema de referencia inercial o no-inercial sin necesidad
de introducir fuerzas ficticias. Ya que es un hecho conocido que las Leyes
de Newton, tal como fueron escritas, sólo son válidas a los sistemas de
referencia inerciales, o más precisamente, para aplicarlas a sistemas
no-inerciales, requieren la introducción de las llamadas fuerzas ficticias.
- Aplicaciones de la Tercera Ley de Newton: Algunos ejemplos donde
actúan las fuerzas acción-reacción son los siguientes:20 Si una persona
empuja a otra de peso similar, las dos se mueven con la misma
velocidad pero en sentido contrario. Cuando saltamos, empujamos a la
tierra hacia abajo, que no se mueve debido a su gran masa, y esta nos
empuja con la misma intensidad hacia arriba. Una persona que rema
en un bote empuja el agua con el remo en un sentido y el agua
responde empujando el bote en sentido opuesto. Cuando caminamos
empujamos a la tierra hacia atrás con nuestros pies, a lo que la tierra
responde empujándonos a nosotros hacia delante, haciendo que
avancemos. Cuando se dispara una bala, la explosión de la pólvora
ejerce una fuerza sobre la pistola (que es el retroceso que sufren las
armas de fuego al ser disparadas), la cual reacciona ejerciendo una
fuerza de igual intensidad pero en sentido contrario sobre la bala.
- La tercera ley de Newton establece que siempre que un
objeto ejerce una fuerza sobre un segundo objeto, este
ejerce una fuerza de igual magnitud y dirección pero en
sentido opuesto sobre el primero. Con frecuencia se
enuncia así: a cada acción siempre se opone una reacción
igual pero de sentido contrario. En cualquier interacción
hay un par de fuerzas de acción y reacción situadas en la
misma dirección con igual magnitud y sentidos opuestos. La
formulación original de Newton es: Actioni contrariam
semper & æqualem esse reactionem: sive corporum duorum
actiones in se mutuo semper esse æquales & in partes
contrarias dirigi. Con toda acción ocurre siempre una
reacción igual y contraria: quiere decir que las acciones
mutuas de dos cuerpos siempre son iguales y dirigidas en
sentido opuesto.
- Primera ley de
Newton (Ley de la
inercia)
- Son tres leyes de
Newton las cuales
son:
Recursos multimedia adjuntos
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
¿Quieres crear tus propios Mapas Mentales gratis con GoConqr? Más información.