25934910
Descripción
Mapa Mental por Gregorio Antonio Monrreal , actualizado hace más de 1 año
|
|
Creado por Gregorio Antonio Monrreal
hace alrededor de 4 años
|
|
Arquitectura de microcontroladores
- Elementos
básicos
- Memorias
- Programa
- Datos
- Programa
- CPU
- Perifericos
- Entrada
- Salida
- Entrada
- Oscilador
Nota:
- Todo microcontrolador requiere un circuito que indique la velocidad de trabajo, para ello se cuenta con el llamado oscilador o reloj. Este genera una onda cuadrada de alta frecuencia que se utiliza como señal para sincronizar todas las operaciones del sistema. Generalmente todos los componentes de reloj se encuentran integrados en el microcontrolador y requieren pocos componentes externos como un cristal de cuarzo o una red RC, para definir la frecuencia de trabajo. Los microcontroladores se pueden configurar de diferentes formas para definir la frecuencia de funcionamiento, pero también sus características dependen de la familia del microcontrolador al que pertenecen.
- Definen la frecuencia de trabajo
- XT. Cristal de cuarzo. Es el más utilizado.
- RC. Oscilador de resistencia y condensador.
- HS (High Speed Crystal/Resonator).
- Externa. Cuando se aplica señal de
reloj externa.
- LP (Low Power Crystal).
- Puertos
Nota:
- La cantidad de puertos depende del microcontrolador.
- A
- B
- ALU
- Contador
- Buses
- De datos
- De instrucciones
- De datos
- Temporizador
- Memorias
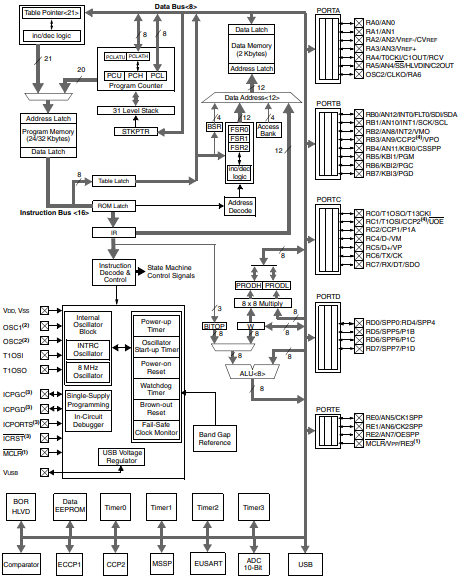
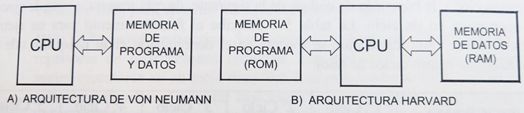
- Arquitectura del PIC 18F4550
- Arquitectura tipo Harvard
- Buses
- De datos
- De direcciones
- De datos
- Ventajas
- Tiene mayor capacidad
de procesamiento
- Tiene mayor capacidad
de procesamiento
- Desventajas
- Ocupa mayor cantidad de
hardware dentro del
microcontrolador.
- Ocupa mayor cantidad de
hardware dentro del
microcontrolador.
- Buses
- Periféricos
- 4 Timers
- 1 ADC DE 10 bits
- Módulo USB
- Comunicación
- USB
- I²C
- USB
- Contadores
- Comparadores
- 4 Timers
- Oscilador
Nota:
- El oscilador se puede configurar utilizando un oscilador interno o externo. El oscilador externo es más estable y reduce variaciones con respecto al oscilador interno.
- Modo de configuración
- 12 modos
- XT, XTPLL,HS,HSPLL,
EC,ECIO, ECPLL, ECPIO,
INTHS, INTXT, INTIO,
INTCKO
- XT, XTPLL,HS,HSPLL,
EC,ECIO, ECPLL, ECPIO,
INTHS, INTXT, INTIO,
INTCKO
- 12 modos
- Interno
- Externo
- Configuración
- Conexión a
preescalador
- División con
el multiplexor
- Entra señal al
oscilador PLL
- Entra señal al
postescalador
- Al tener salida
del multiplexor
será la salida del
oscilador
primario
- Conexión a
preescalador
- • Forma parte de las familias de
microcontroladores de Microchip
de 8 bits y familia 18. Tiene mejores
prestaciones de velocidad de
procesamiento y periféricos
integrados.
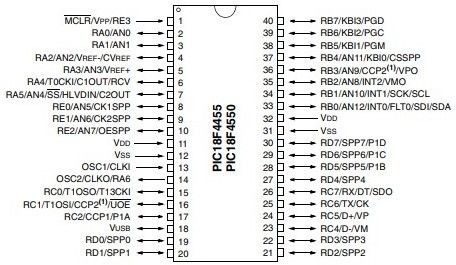
- Diagrama de bloques y PIN OUT
- Puertos
Nota:
- Cada microcontrolador tiene diferentes cantidades de puertos de acuerdo a sus características. Algunas líneas de estos puertos se comparten con otros recursos internos.
- Los puertos se
pueden programar
individualmente
como entradas o
como salidas.
- 5 Puertos de I/O
- Puerto A
- Puerto B
- Puerto C
- Puerto D
- Puerto E
- Puerto A
- 5 Puertos de I/O
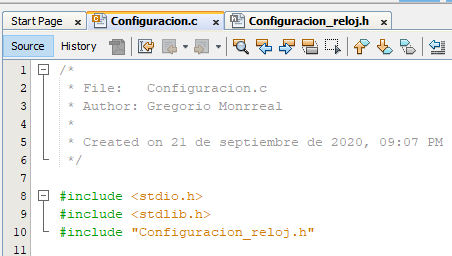
- Configuración
del reloj en
MPLAB X
- Arquitectura tipo Harvard
- Interrupción
Nota:
- A partir de entonces se produce automáticamente un salto a una subrutina de atención a la interrupción, está atiende inmediatamente el evento y retoma luego la ejecución del programa exactamente donde estaba en el momento de ser interrumpido, continuando su tarea justo donde la dejo. La interrupción nace de la necesidad de ejecutar una subrutina en el instante preciso y, por tanto, se considera su intervención urgente.
- Consiste en un
mecanismo por el cual
un evento interno o
externo puede
interrumpir la ejecución
de un programa en
cualquier momento.
- Perro guardián o
watchdog (WDT)
Nota:
- Para realizar esta función, el perro guardián sale a dar un paseo por la CPU cada cierto tiempo, asegurándose que el programa se ejecute normalmente; en caso contrario (por ejemplo, si el control está detenido en un bucle infinito o a la espera de algún acontecimiento que no se produce), el watchdog “ladra” y provoca un reset, reiniciando todo el sistema.
- Pretende reflejar la función
de este recurso: “vigilar”
que el programa no se
“cuelgue” y dejen por esto
de ejecutarse las
instrucciones, tal como lo
ha previsto el diseñador.
- ADC
Nota:
- Cuando se trabaja como ADC, el ciclo de conversión se inicia siempre tras el envío de una dirección de lectura válida y se inicia con el flanco descendente del pulso de reconocimiento, y finalmente, se ejecuta mientras transmite el resultado de la conversión. Una vez iniciado el ciclo de conversión de una muestra de la tensión de entrada del canal seleccionado se convierte al correspondiente código binario. La conversión resultante se guarda en el registro de datos del ADC en espera de ser transmitida. Si está activado el flag de autoincremento será seleccionado el siguiente canal. El primer byte transmitido en un ciclo de lectura contiene el código resultante del ciclo de conversión.
- Se refiere a un
convertidor
Analógico digital
(Analog to Digital
Converter).
- Temporizador
Nota:
- Un timer típico consiste en un contador ascendente o descendente, que, en vez inicializado con un valor, su contenido se incrementa con cada impulso de entrada hasta llegar a su valor máximo, desbordando y volviendo a comenzar de cero.
- Un temporizador (timer) se
implementa por medio de
un contador que
determina un tiempo
preciso entre el momento
en que el valor es cargado
y en el instante en el que
se produce su
desbordamiento.
- Contador
- El contador tiene la
misión de “contar” el
número de
acontecimientos
externos
representados por los
impulsos que se
aplican al pin del
TxCKI.
- El contador tiene la
misión de “contar” el
número de
acontecimientos
externos
representados por los
impulsos que se
aplican al pin del
TxCKI.
- PWM
Nota:
- Este tipo de señal se puede utilizar en una variedad de aplicaciones, como control de motores, iluminación LED y fuentes de alimentación.
- Es la modulación por ancho
de pulso, un periférico de
modulación de ancho de
pulso (PWM) se usa para
generar una señal digital con
un período y ciclo de trabajo
definidos por el usuario
- EUSART
Nota:
- Contiene todos los generadores de reloj, registros de desplazamiento y búfer de datos necesarios para realizar una transferencia de datos en serie de entrada o salida independientemente de la ejecución del programa principal. El EUSART, también conocido como interfaz de comunicaciones en serie (SCI), se puede configurar como un sistema asíncrono dúplex completo o un sistema síncrono semidúplex.
- Es un periférico para manejar
comunicaciones de E / S en
serie.
Recursos multimedia adjuntos
{kind=link}
{kind=link}
{kind=link}
{kind=link}
¿Quieres crear tus propios Mapas Mentales gratis con GoConqr? Más información.