33058300
Descripción
Mapa Mental por Monse Martínez, actualizado hace más de 1 año
|
|
Creado por Monse Martínez
hace alrededor de 3 años
|
|
Arquitectura de Microcontroladores
PIC18F4550
- Reloj Oscilador
Nota:
- Es una onda cuadrada que sincroniza e indica la velocidad de operación del microcontrolador.
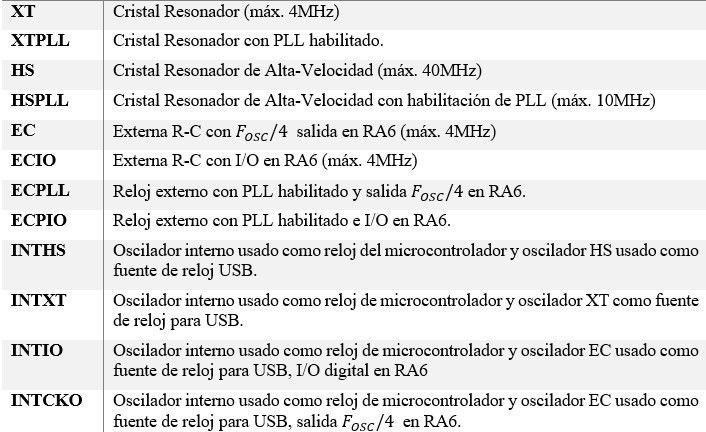
- Modos de Configuración de Reloj Oscilador
- La frecuencia de trabajo del PIC18F4550 va desde DC hasta
48MHz.
- La frecuencia de trabajo del PIC18F4550 va desde DC hasta
48MHz.
- Los registros de configuración de
este módulo son CONFIG1L,
CONFIG1H, OSCCON, OSCTUNE,
INTRC.
Nota:
- Los registros de configuración son CONFIG1L y CONFIG1H. El registro OSCCON controla varios aspectos de la operación de reloj como el modo de reloj activo, el switcheo de reloj y los modos de manejo-alimentación. El registro OSCTUNE tiene la función de ajustar la fuente de frecuencia INTRC, así como seleccionar la fuente de reloj de baja frecuencia.
- Osciladores Secundarios, son
aquellas fuentes externas
que no se conectan a los
pines OSC1 y OSC2.
Usualmente se utilizan
cuando el controlador se
coloca en algún modo
especial de
manejo-de-energía.
- Osciladores Primarios,
incluyen el cristal externo
y los modos del resonador,
los modos de reloj externo
y el bloque del oscilador
interno.
- Bloque Oscilador Interno,
se utiliza para
configuraciones especiales
como WDT y Monitor de
reloj a prueba de fallos.
- Organización de Memoria
Nota:
- Los microcontroladores PIC18 tienes tres tipos de memoria mejorada. - Memoria de programa. - Memoria de datos RAM. - Memoria EEPROM.
- Memoria de Programa
Nota:
- Almacena instrucciones y constantes/datos. Puede ser escrita/leída mediante un programador externo o durante la ejecución del programa para la lectura de tablas o datos almacenados.
- El Contador de Programa (PC) especifica la
dirección de la instrucción a buscar para la
ejecución. Se compone de 21-bit que contienen
tres registros de 8-bits (PCL, PCH y PCLATH)
- Vectorización del Reset es 0000H.
- Vectorización de las interrupciones de alta prioridad es 0008H.
Vectorización de las interrupciones de baja prioridad es 0018H.
- Memoria de
Datos
Nota:
- Memoria estática RAM. Son 8 bancos de 256 bytes, para un total de 2048 bytes. Almacena instrucciones y constantes, datos. Puede ser escrita/leída mediante unprogramador externo o durante la ejecución del programa para la lectura de tablas o datos almacenados.
- Registros de Propósito General (GPR)
Nota:
- Se utiliza para almacenamiento, datos y operaciones que establece el usuario. Es memoria de datos establecida para las instrucciones.
- Registros de Función Especial (SFR)
Nota:
- Existen dos tipos: - Relacionados a la ALU: como RESET e interrupciones. - Relacionados a las funciones perífericas: se utilizan para configurar y controlar el estatus de funciones de los periféricos del microcontrolador.
- Los registros WREG, STATUS y SBR configuran o
establecen exclusivamente el comportamiento de la
ALU.
- Los modos de direccionamiento de la memoria
de datos es de forma directa, indirecta, inherente
y literal.
- Memoria EEPROM
Nota:
- Almacena datos que se deben conservar aun en ausencia de tensión de alimentación, no es volátil. Se accede a esta memoria a través de los SFRs, y permite hasta un millón de ciclos de borrado/escritura. Se puede leer/escribir de forma individual en cada una de las 256 posiciones de memoria. La memoria EEPROM para la familia PIC18 queda establecida en 256 Bytes.
- Los registros de control para la memoria
EEPROM son: EECON1, EECON2, EEDATA, EEADR.
Nota:
- Los registros asociados a la memoria EEPROM son: - EECON1, es el registro de control para acceder a la memoria de datos y de programa.- EECON2, no es un registro físico, pero se utiliza exclusivamente en la escritura de memoria y en las secuencias de borrado.- EEDATA, mantiene los datos de 8-bit para lectura/escritura.- EEADR, mantiene la dirección de localización EEPROM a la que se accederá.
- Memoria de Programa
FLASH
Nota:
- Se trata de un bloque de memoria que puede leerse, escribirse y borrarse; está situado a partir de la posición 30000H de la memoria del programa.
- Los operandos que permiten la
modificación en la memoria son: Table
Read TBLRD y Table Write TBLWR.
- Los registros asociados a la configuración de la
memoria FLASH son: TABLAT, TBLPRT, ECCON 1 Y
ECCON2.
Nota:
- - TABLAT (registro de tabla latch), es un registro de 8-bits mapeado en el espacio de un registro SFR, que se utiliza para la transferencia de datos entre la memoria de programa y la memoria RAM de datos. - TBLPTR (registro de tabla puntero), es un registro que direcciona bytes dentro de la memoria de programa. Se apoya de las instrucciones TBLRD (table read) y TBLWT (table write), para la lectura y escritura de datos.
- Interrupciones
Nota:
- Las interrupciones permiten a cualquier suceso interior o exterior interrumpir la ejecución del programa principal en cualquier momento.
- Vector de interrupción de Alta
Prioridad en la dirección 000008h
- Vector de interrupción de Baja
Prioridad en la dirección 000018h
- Los registros de
control son los
siguientes: RCON,
INTCON, INTCON2,
INTCON3, PIR1, PIR2,
PIE1, PIE2, IPR1 y
IPR2,
Nota:
- - RCON, Registro del control reset. - INTCON, Interruptor de control de registro. - INTCON2, Interruptor de control de registro 2.- INTCON3, Interruptor de control de registro 3. - PIR1, PIR2, Solicitud de interrupción periférica 1 y 2. - PIE1, PIE2, Habilitación de interrupción periférica 1 y 2. - IPR1, IPR2, Prioridad de interrupción periférica 1 y 2.
- Bit habilitador que permite la
ejecución de la rama de dirección
del vector de interrupción.
- Bandera o Flag, para indicar
que ocurrió un evento de
interrupción.
- Bit de prioridad, para la
selección de alta o baja
prioridad.
- Puertos de Entrada/Salida (I/O)
Nota:
- Su principal función es conectar el microcontrolador con el exterior, es decir, darle la capacidad de recibir señales y/o mandar señales.
- Puerto A. Puerto bidireccional de
8-bits.
- Puerto B. Puerto bidireccional de
8-bits.
- Puerto C. Puerto bidireccional de
7-bits. La salida esta multiplexada con
los módulos de comunicación serial.
- Puerto D. Puerto bidireccional de 8-bit.
Multiplexado con módulo CCP y ECCP.
- Puerto E. Puerto de 4-bits.
- Los registros para la configuración de
puertos I/O son:
- Registro TRIS, registro de dirección de datos.
Mediante este registro se configuran cada
una de las líneas de I/O del puerto como
Entrada (bit correspondiente a ´1´) o como
SALIDA (bit correspondiente a ´0´).
Nota:
- Por ejemplo: - TRISA = 0b11111111; Configura todos los pines del Puerto A como Entrada. - TRISB = 0b00000000; Configura todos los pines del Puerto A como Salida. - TRISE = 0b00001111; Los pines Altos como Salida y el resto como Entrada. - TRISBbits.TRISB7 = 1; configura el pin B7 del Puerto B como entrada digital. - TRISDbits.TRISD5 = 0; confiura el pin D5 del Puerto D como salida digital.
- Registro PORT, lee los niveles de los pines
en el dispositivo. Mediante este registro se
puede leer el nivel del pin de I/O y se puede
establecer el valor de latch de salida.
Nota:
- Valor = PORTA [ RA0 ] : El estado lógico del pin A0 se escribe en la variable valor. Valor = PORTA : El estado lógico del todo el Puerto A se escribe en valor. Por ejemplo: PORTB=0B11000000; PORTB=0B01100000; PORTD=0B00110000; if(!PORTBbits.RB4); Lee el valor del pin RB4 del Puerto B y condiciona una acción dependiente del valor de entrada.
- Registro LAT, mediante este registro se
puede establecer el valor de latch de
salida.
Nota:
- LATA = 0b11111111; Todos los pines del Puerto A con una salida de 5v. LATA = 0b00000000; Todos los pines del Puerto A con una salida de 0v. LATA = 0b00001111; Los pines Altos a 0v y los pines Bajos a 5v.
- Registro TRIS, registro de dirección de datos.
Mediante este registro se configuran cada
una de las líneas de I/O del puerto como
Entrada (bit correspondiente a ´1´) o como
SALIDA (bit correspondiente a ´0´).
- Temporizadores
Nota:
- Los timers son módulos integrados en el PIC que permiten realizar cuentas de eventos internos y externos; cuando la cuenta es interna se habla de temporización y cuando es externa se habla de contador.
- Timer 0
- La configuración se realiza
con ayuda del registro
T0CON
Nota:
- Configurable como temporizador/contador de 8 ó 16 bits Pre-escalar de 8 bits programable por software.Interrupción por desbordamiento.Registro de lectura y escritura. Fuente de reloj seleccionable (interna o externa). Selección de borde para reloj externo.
- El registro T0CON, en la configuración
del bit 5 (T0CS) permite determinar si el
timer se comportará como un
temporizador o como un contador. Valor
de 1 en este bit indica que el timer se
comportará como contador.
Nota:
- En el comportamiento como contador, el Timer0 se incrementa con cada flanco ascendente o descendente a la entrada del pin RA4/T0CKI. Si el conteo debe ser en flanco ascendente o descendente se define en el bit T0SE
- La configuración se realiza
con ayuda del registro
T0CON
- Timer 1
- La configuración se realiza
con ayuda del registro
T1CON
Nota:
- - Configurable como temporizador/contador de 16 bits. - Dispone de un oscilador propio que puede funcionar como: § Señal de reloj del temporizador 1. § Señal de reloj del PIC en modos de bajo consumo. - Pre-escalar de 3 bits programable. Interrupción por desbordamiento. - Registros de 8-bits de lectura y escritura (TMR1H, TMR1L). - Módulo reset en disparador de eventos especiales CCP. - Funciona como temporizador, contador síncrono y contador asíncrono
- La seleeción del modo de trabajo como
contador o temporizador se define en el
bit 1 (TM1RSC).
Nota:
- Cuando el bit=0 el temporizador aumenta cada ciclo de instrucción, cuando el bit =1 el contador aumenta en el flanco ascendente del reloj externo o del oscilador interno si está habilitado.
- La configuración se realiza
con ayuda del registro
T1CON
- Timer 2
- La configuración se realiza
con ayuda del registro
T2CON
Nota:
- Temporizador de 8 bits (registro TMR2). Registro de periodo PR2. Pre-escalar de 2 bits programable por software (1:1,1:4, 1:16). Post-escalar de 4 bits programable por software (1:1, … 1:16). Interrupción por igualdad entre TMR2 y PR2. Se puede utilizar junto con los módulos CCP y ECCP. Se puede utilizar como señal de reloj del módulo MSSP en modo SPI.
- La configuración se realiza
con ayuda del registro
T2CON
- Timer 3
- La configuración se realiza
con ayuda del registro
T3CON
Nota:
- Configurable como temporizador/contador de 16 bits. Registros de 8-bits de lectura y escritura (TMR3H, TMR3L).Funciona como temporizador, contador síncrono y contador asíncrono.Dispone de varias opciones de señal de reloj en modo temporizador.- Oscilador principal con o sin pre-escalar.- Oscilador del temporizador 1 con o sin pre-escalar.- Pre-escalar de 3 bits programable.- Interrupción por desbordamiento.
- La selección del modo de trabajo como
contador o temporizador se define en el
bit 1 (TM3RSC), del registro T3CON
Nota:
- Cuando el bit=0 el temporizador aumenta cada ciclo de instrucción, cuando el bit =1 el contador aumenta cada ciclo ascendente del reloj externo en el Timer 1 o del oscilador interno del Timer 1 si está habilitado.
- La configuración se realiza
con ayuda del registro
T3CON
- Contadores
- Módulo Compara/Captura/PWM (CCP) y
Módulo ECCP
- Módulo
Compara
Nota:
- Compara el valor del temporizador con el valor de un registro y provoca una acción en el PIC.
- Módulo
Captura
Nota:
- Obtiene el valor del temporizador en un momento dado, fijado por la acción de un terminal del PIC
- Módulo
PWM
Nota:
- Genera una señal modulada de amplitud de pulso. En módulo PWM mejorado: se utiliza para generar señales PWM complementarias para el control de semipuentes de transistores. Con 4 canales de salida, polaridad seleccionable por el usuario, reset y apagado automático, control de banda-muerta.
- A dichos registros CCP se asocian los siguientes: - CCPxCON: registro
de control del CCP. - CCPRxH: byte alto del registro de 16 bits del CCP.
- CCPRxL: byte bajo del registro de 16 bits del CCP. - CCPx: pin del
CCP.
- Módulo
Compara
- Comunicación Serial
Nota:
- La transmisión serie consiste en enviar los datos bit a bit a través de una línea común en periodos de tiempo fijos.
- Puerto de Serie Síncrono
Maestro (MSSP)
- Interfaz Serie de Periféricos
(SPI)
Nota:
- Desarrollada por Motorola y que permite una comunicación Full-duplex en modo maestro -esclavo. Esta interfaz permite la transmisión y recepción sincronizada simultáneamente de datos de 8-bits
- Interfaz Inter-Circuitos
(I2C)
Nota:
- Desarrollada por Philips, comunicación Half-duplex. La interfaz se implementa direccionamientos de 7 y 10 bits.
- La interfaz Inter-Circuitos (I2C), se basa en la comunicación a través de 2 hilos, donde cada dispositivo conectado al bus tiene una dirección. Esta característica, le permite un modo de operación maestro-esclavos o multimaestro. Recordando que el dispositivo maestro es quien decide con quien se realiza, el sentido de y cuando finaliza la transferencia. La transmisión puede ser de lectura o escritura, el último bit de la dirección lo indica
- Los registros asociados a la configuración
de la comunicación serie MSSSP son:
SSPCON1, SSPCON2, SSPADD, SSPBUF,
SSPSTAT, SSPRS,
Nota:
- o SSPCON1, registro de control MSSP 1. o SSPCON2, registro de control MSSP 2. o SSPADD: define la dirección del esclavo o los baudios de la comunicación del máster. o SSPBUF, es un buffer de transmisión/recepción serie, es el registro desde el cual se leen los datos a transmitir. o SSPSTAT, registro de estado MSSP. o SSPRS, es un registro de desplazamiento, desplaza el dato para transmitirlo o recibirlo.
- Interfaz Serie de Periféricos
(SPI)
- Interfaz de Comunicación Serie (SCI) o
Receptor/Transmisor de Serie Síncrono
Universal Mejorado (EUSART)
Nota:
- Es uno de los dos módulos I/O tipo serie Puede transmitir o recibir datos serie de 8 o 9 bits y detectar errores en la trasmisión. Permite la comunicación con un ordenador trabajando en modo full-duplex asíncrono para la comunicación con dispositivos periféricos como PC o terminales CRT. O también puede trabajar en modo half-duplex síncrono para comunicación con perífericos como A/D, cirucitos integrados etc. Los pines para la configuración del módulo EUSART están mutiplexados con el puerto C,y es necesario definir los siguientes bits de registro para que se establezca el módulo: SPEN (RCSTA<7>)=1, TRISC<7> =1 y TRISC<6>=1.
- Asíncrono
Nota:
- Este modo se establece igualando a cero el bit TXSTA<4>. El modo de trabajo se define con el estandar no-return-to-zero (NZR) que quiere decir 1bit para inicio, 8-9bits para datos y 1-bit de parada. En este modo de comunicación se enviía y recibe primero el bit menos significativo, no se envía señal de reloj, por lo que emisor y receptor deben tener relojes con la misma frecuencia y fase. Se utilizan dos líneas de transmisión, una transmisora y otra receptora, en ambos sentidos; lo quepermite la transmisión y recepción simultánea.
- Trabajando en este modo de comunicación es
importante considerar los siguientes elementos:
- Generador de velocidad de Baudios. -
Transmisor Asincrono. - Receptor Asíncrono. -
Módulo de Muestreo. - Auto-encendido en señal
de Break. - Transmisor de caracteres Break de
12-bits. - Detección automática de velocidad e
baudios. - Estado de polaridad del pin.
- Síncrono
Nota:
- En este modo de comunicación se utiliza una señal de reloj y una línea de datos sin límite de tamaño, limitado en el sentido de la trasmisión. Se puede trabajar de dos formas, en modo maestro o en modo esclavo.
- Modo Maestro
Nota:
- Este modo de trabajo se establece igualando a 1 el valor del bir TXSAT<7> del registro CRCS, así como el bit TXSTA<4> del registro SYNC. Se habilita también el pin RCSTA<7> del registro SPEN, para el reloj y las líneas de datos. En el modo Maestro (Half-duplex) la transmisión y la recepción no se llevar a cabo al mismo tiempo. Este modo indica que el CPU transmite el reloj maestro a través de la línea CK (polaridad del reloj). La polaridad de selecciona en el bit BOUDCON<4> del registro TXCKP.
- Modo Esclavo
Nota:
- Este modo difiere del modo Maestro en que señal de reloj es externa (proveída por el maestro). La configuración en este modo de trabajo queda definida igualando a 0 el valor del pin TXSTA<7> del registro CSRC.
- Los registros asociados al
módulo USART/SCI son: SPBRG,
TXSTA, BAUDCON, RCSTA,
TXREG,RCREG, PIR1, PIE1
Nota:
- Los registros asociados al módulo USART/SCI son: o SPBRG: Generador de ratio de baudios. o TXSTA: Estado de la transmisión y control. o BAUDCON: Control de velocidad de transmisión. o RCSTA: Estado de recepción y control. o TXREG: Registro de datos de transmisión. o RCREG: Registro de datos de recepción. o PIR1: Flag de interrupción. o PIE1: Habilitación de la interrupción.
- Módulo de Comunicación USB
Nota:
- El módulo USB en la familia PIC18 incorpora su propio chip transceptor y un regulador de 3.3V aunque también se puede configurar con estos componentes de forma externa
- Tranceptor Interno
Nota:
- Se contecta internamente de forma directa al SIE. Los registros de control para su configuración son: - UTRDIS: para habilitar. - FSEN: para la velocidad de operación del tranceptor. - UPUEN: para configurar las resistencias pull-up.
- Tranceptor externo
Nota:
- Su función es apoyar en la comunicación cuando el tranceptor no puede estar directamente conectado al SIE. Se configura también a través del registro UCON, en el bit UTRDIS. Existen 6 tipos de señales mediante las que el módulo se puede comunicar con el traceptor externo: VP, VM, RCV, MVO, MVP, UOE.
- Para comunicación USB para
transmisiones a baja y alta
velocidad
- Los registros asociados a la configuración del módulo USB son:
UCON, UCFG, USTAT, UADDR, UFRMH, UFMRL, UEPNx.
Nota:
- - UCON, registro de control USB. Contiene bits necesarios para el control del comportamiento del módulo durante las transferencias. -UCFG, registro de configuración USB. Para la configuración de hardware interno o externo al módulo. - USTAT, registro de transferencia de estatus USB. Reporta el estatus de la transacción con elSIE (interfaz serial USB). - UADDR, registro de direccionamiento del dispositivo USB. Contiene la dirección única USB que el periférico decodifica al activarse. - UFRMH – UFRML, registro de número de carcasa. - UEPn, registros de habilitación de punto final.
- Los registros asociados a la configuración del módulo USB son:
UCON, UCFG, USTAT, UADDR, UFRMH, UFMRL, UEPNx.
- Módulo Convertidor
Analógico/Digital
- El módulo A/D de la familia PIC18 es de 10
bits y tiene de 10 a 13 canales de entrada.
Su funcionamiento se basa en la conversión
por aproximaciones sucesivas.
Nota:
- El convertidor de aproximaciones sucesivas se utiliza para aplicaciones que necesitan altas velocidades de conversión, y la conversión se realiza comparando sucesivamente de forma ascendente o descendente hasta encontrar un valor digital que iguale la tensión entregada por el conversor D/A y la tensión de entrada.
- Los registros para la
configuración del convetidor AD
son: ADCON0, ADCON1,
ADCON2, ADRESH, ADRESL.
Nota:
- - El registro ADCON0 permite establecer: el número de canales analódigos a implementar, habitilar el convertidor y monitorizar el estatus de la conversión. - El registro ADCON1 permite establecer los voltajes de referencia y la configuración de los bits de control del convertidor, el número de entradas analógicas del sistema. - El registro ADCON2 permite seleccionar la configuración de los bits de salida del módulo; establecer el tiempo de adquisición de señal y los bits del reloj de conversión. - Los registros ADRESH y ADRESL son los resultados en estado alto y bajo de la conversión.
- El módulo A/D de la familia PIC18 es de 10
bits y tiene de 10 a 13 canales de entrada.
Su funcionamiento se basa en la conversión
por aproximaciones sucesivas.
- Comparadores Analógicos
Nota:
- La función principal del módulo comparador es diferenciar entre dos señales de entrada.
- El módulo de comparadores analógicos contiene
dos comparadores que pueden ser configurados en
distintas formas:
- El registro asociado a la
configuración de este
módulo es el registro
CMCON, y sus bits se
utilizan para definir el
modo de comparación que
se utilizará.
Nota:
- - Comparador de Resets. - Comparador de Apagado (OFF) - Dos comparadores independientes. - Dos comparadores independientes con salidas. - Dos comparadores de referencia común. - Dos comparadores de referencia común con salidas. - Un comparador independiente con salida. - Cuatro entradas multiplexadas a dos comparadores.
- El registro asociado a la
configuración de este
módulo es el registro
CMCON, y sus bits se
utilizan para definir el
modo de comparación que
se utilizará.
- Reset
Nota:
- Permite la re-inicialización del programa y del sistema para que todo vuelva a su estado de inicio.
- Existen 8 modos de aplicar un RESET al
microcontrolador PIC18: Reinicio por encendido
(POR). Reinicio por MCLR en funcionamiento normal.
Reinicio MCRL en modo de energía. Reinicio del
temporizador de vigilancia (WDT). Restablecimiento
por caída de voltaje (BOR). Instrucción RESET.
Reinicio completo de la pila. Restablecimiento por
subdesbordamiento de pila.
- El registro de control RCON,
permite habilitar el modo de reset,
indica las banderas que se
establecen cuando se lleva a cabo
un reset.
- WatchDog Timer WDT
Nota:
- Es un temporizador interno que protege el estado de la unidad de control a través de un reset del sistema. El WDT es controlado por la fuente INTRC y su periodo nominal es de 4ms y tiene la mismabestabilidad que el oscilador INTRC.
- Su registro de control es WDTCON y las instrucciones para su
operación son SLEEP o CLRWDT.
- Puerto Paralelo Streaming
Nota:
- Es una interfaz de alta-velocidad para mover datos de y hacia un dispositivo externo.
- Configuración para
control USB
Nota:
- El tipo de transferencia para esta configuración es isosincróna. El reloj y las líneas de datos se establecen mediante la configuración del módulo USB sin intervención del microcontrolador. Los datos se registras dentro o fuera del SSP con la información de punto-final primero, seguido de los bits de datos.
- Configuración para
control de
Microconttolador
Nota:
- En este modo de control el microcontrolador establece el reloj a través de la configuración de reloj general. Los datos se leen y escriben a través del registro SPPDATA. La configuración se establece por medio del registro SPPESP.
- Los registros para la configuración de
este puerto son: SPPCON Y SPPCFG
Nota:
- El registro SSPON determina la configuración para el tipo de control, ya sea USB o Microcontrolador. El registro SPPCGF determina las características de reloj y salidas.
- Instrucciones de programación
Nota:
- La familia PIC18 incorpora un set de 75 instrucciones de programación y cuando este habilitado el set de instrucciones extendido llega a 83, siendo las 8 instrucciones para la optimización de código.
- Operaciones Orientadas a Bits
Nota:
- Se componen de tres operandos, el registro de archivo (´f´), el destino del resultado (´d´) y el direccionamiento de memoria (´a´). Por ejemplo: BCF, BSF, BTFSC, BTFSS BTG.
- Operaciones orientadas a Bytes
Nota:
- Se componen de tres operandos, el registro de archivo (´f´), el destino del resultado (´d´) y el direccionamiento de memoria (´a´). Por ejemplo: ADDWF, CLRF, DECF, MOVF.
- Operaciones Literales
Nota:
- Pueden contener los siguientes operandos, un valor literal a ser cargado en el registro de archivo (´k´), el registro FSR para cargar el valor literal (´f´) y también podría no contener operando (´-´). Por ejemplo: ADDLW ANDLW, IORLW, LFSF, MOVLB, MOVLW, MOVLW, RETlw, SUBLW, XORLW.
- Operaciones de Control
Nota:
- Pueden utilizar los siguientes operandos, una dirección de memoria de programa (´n´), el modo de instrucción de CALL o RETURN (´s´), el modo de lectura de tabla o escritura de tabla (´m´) y también podría no contener operando (´-´). Por ejemplo: BC, BN, BNC, BNN, BNOV, BNZ, BOV, BRA, BZ, CALL, CLRWDT DAW, GOTO, NOP, PUSH, RCALl, RESET, RETFIE, RETLW, RETURN SLEEP.
Recursos multimedia adjuntos
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
¿Quieres crear tus propios Mapas Mentales gratis con GoConqr? Más información.