36702458
Descripción
Mapa Mental por Edgar Artola, actualizado hace más de 1 año
|
|
Creado por Edgar Artola
hace casi 4 años
|
|
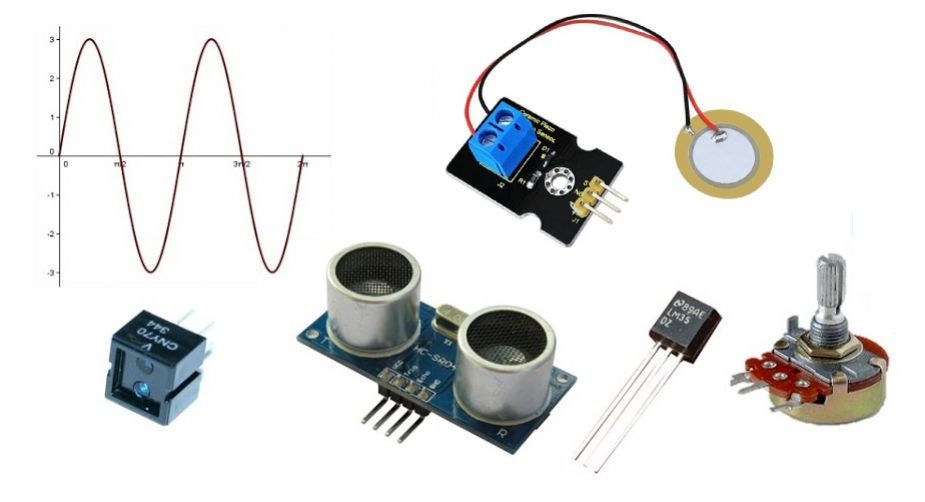
SENSORES
Nota:
- DEFINICION: Dispositivo electrico que convierte magnitudes fisicas en valores medibles
- SENSORES INTERNOS
- Dan informacion de la
estructura del robot
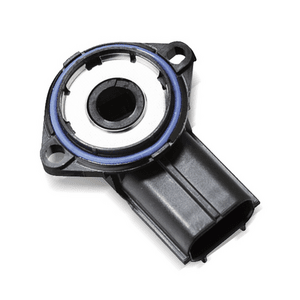
- Sensores de posicion
- Potenciometros
- Resolver
- Sincro
- Sincro
- Resolver
- Potenciometros
- Sensores
Lineales
- LVDT
Nota:
- Transformador diferencial de variación lineal, que consta de un núcleo de material ferromagnético unido al eje, que se mueve linealmente entre un devanado primario y dos secundarios haciendo que varíe la inductancia entre ellos.
- LVDT
- Sensores de
aceleracion
Nota:
- Utilizando un sensor de fuerza, si medimos la fuerza, y conocemos la masa se aplica el segundo principio de Newton y se calcula la aceleración: F= m*a
- Sensores de
velocidad
- Tacogenerador
Nota:
- proporciona una tensión proporcional a la velocidad de giro del eje. Utiliza un interruptor llamado “reed switch”, que utiliza fuerzas magnéticas para activarse o no dependiendo si un objeto magnético se encuentra físicamente cercano al interruptor.
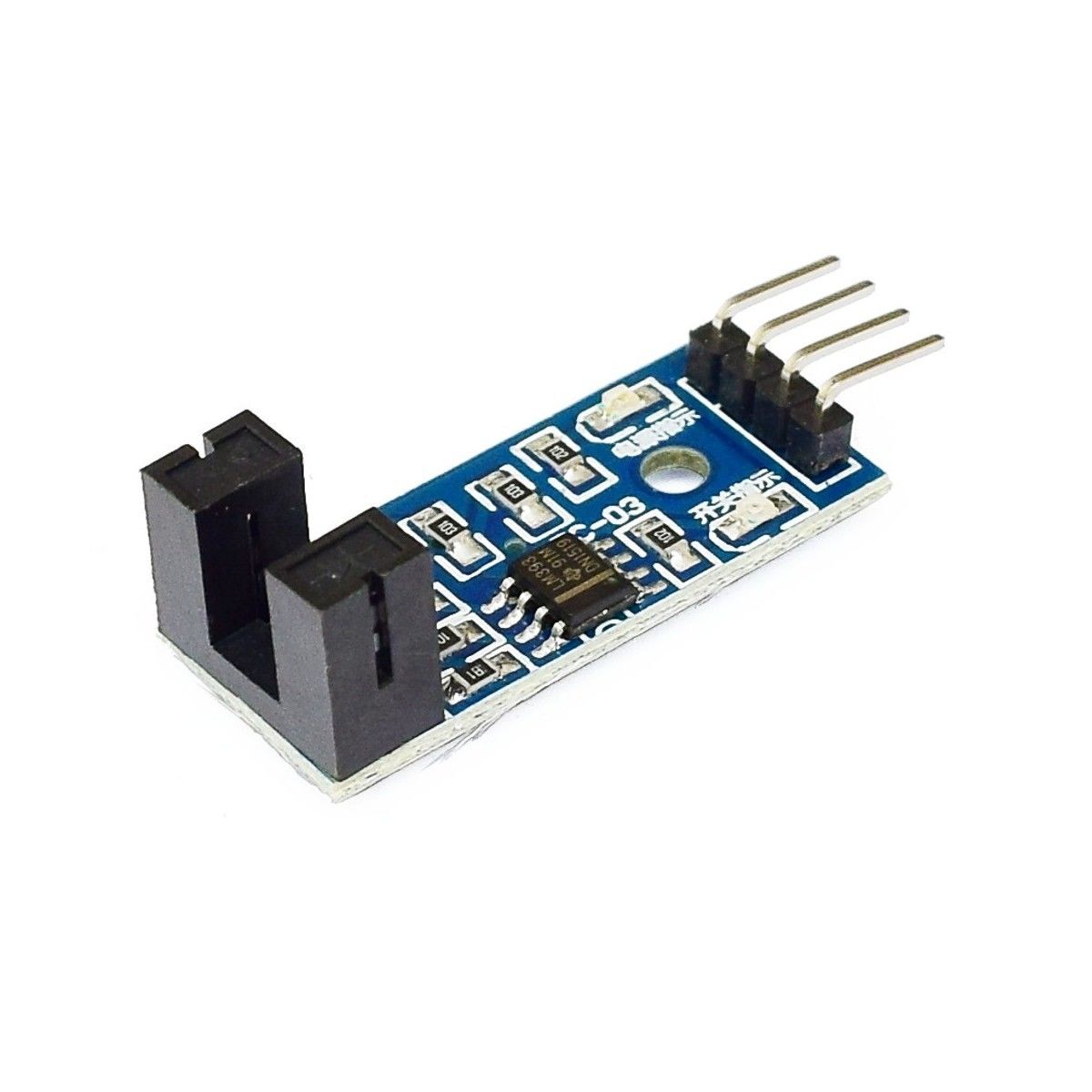
- Encoders
Nota:
- si se dispone de un detector que se active cuando se ha realizado un giro completo, se calcula la velocidad: el número de vueltas por unidad de tiempo.
- Tacogenerador
- Dan informacion de la
estructura del robot
- SENSORES EXTERNOS
Nota:
- Dan informacion del entorno del robot
- Sensores de proximidad
- Sensores
Inductivos
Nota:
- Modificación de un campo magnético por presencia de objetos metálicos. Consiste en una bobina situada junto a un imán permanente. En condiciones estáticas no hay ningún movimiento en las líneas de flujo y no se induce ninguna corriente en la bobina.
- sensores
capacitativos
Nota:
- Modificación de la capacidad de un condensador por presencia de objetos sólidos.
- Sensores opticos
- Sensores
Inductivos
- Sensores de proximidad
- Sensores de efecto Hall
Nota:
- Modificación de un campo magnético por presencia de objetos metálicos. El efecto Hall relaciona la tensión entre dos puntos de un material conductor o semiconductor con un campo magnético a través de un material.
- Sensores ultrasonicos
Nota:
- Modificación de la distancia de objetos mediante la detección de ecos de ultrasonidos.
- Sensores opticos
Nota:
- Emisor de luz por diodo LED + recepción por un fotodiodo.
- Sensores de efecto Hall
- Sensores de contacto
- Binarios
Nota:
- Informan sobre la presencia de objetos
- Analogicos
Nota:
- Detectan no sólo la presencia, sino también la fuerza ejercida
- Binarios
- Deteccion de fuera y torsion
- Sensor de muñeca
- Sensor de muñeca
- Un fenomeno fisico es captado
- La señal electrica es modificada
por un sistema de
acondicionamiento de señal.
- El sensor modifica y amplifica
la tension de salida.
- El sensor modifica y amplifica
la tension de salida.
- La señal electrica es modificada
por un sistema de
acondicionamiento de señal.
- DESCRIPTORES ESTATICOS
DEL SENSOR [LEER NOTA]
Nota:
- RANGO: Valores maximos y minimos. EXACTITUD: Desviacion de la lectura respecto a una entrada conocida. REPETITIVIDAD: La capacidad de reproducir una lectura con precicion dada. REPRODUCIBILIDAD: Se usa cuando se toman medidas distintas bajo condiciones diferentes. RESOLUCION: La cantidad mas pequeña que se puede detectar.ERROR: Diferencia entre el valor medido y el valor real.NO LINEALIDADES: La desviacion de la medida de su valor real. SESIBILIDAD: Es la razon de cambio de la salida frente a cambios en la entrada: s=av/ax. EXITACION: Es la cantidad de corriente o voltaje requerida para el funcionamiento del sensor. ESTABILIDAD: Medida de posibilidad de un sensor de mostrar la misma salida en un rango que la entrada permanence consntante.
- EDGAR AMILCAR BA ARTOLA
- ARQUITECTURA DE COMPUTADORA
- 0902-13-4273
- 0902-13-4273
- ARQUITECTURA DE COMPUTADORA
- DESCRIPTORES DINAMICOS
[Todos tienen notas]
- TIempo de
retardo
Nota:
- td, es el tiempo que tarda la salida del sensor en alcanzar el 50% de su valor final.
- Tiempo de
subida
Nota:
- tr, es el tiempo que tarda la salida del sensor hasta alcanzar su valor final. => velocidad del sensor, es decir, lo rápido que responde ante una entrada.
- Tiempo de
pico
Nota:
- tp, es el tiempo que tarda la salida den sensor en alcanzar el pico máximo de su sobreoscilación
- Pico de
sobreoscilacion
Nota:
- Mp, espresa cuanto se eleva la evolución temporal de la salida del sensor respecto de su valor final.
- Tiempo de
establecimiento.
Nota:
- ts, el tiempo que tarda la salida del sensor en entrar en la banda del 5% alrededor del valor final y ya no vuelve a salir de ella.
- TIempo de
retardo
Recursos multimedia adjuntos
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
¿Quieres crear tus propios Mapas Mentales gratis con GoConqr? Más información.