12778507
Description
Mind Map by telmitHa Lopez, updated more than 1 year ago
|
|
Created by telmitHa Lopez
over 6 years ago
|
|
Tema 1.-
Características de
un procesador
- 1.1.- Bus.
- Es un sistema digital que transfiere datos entre los
componentes de una computadora o entre varias
computadoras. Está formado por cables o pistas en
un circuito impreso, dispositivos como resistores y
condensadores además de circuitos integrados.1
- Existen dos tipos
de transferencia
en los buses:
- Serie: El bus solamente
es capaz de transferir
los datos bit a bit. Es
decir, el bus tiene un
único cable que transmite
la información.
- Paralelo: El bus
permite transferir
varios bits
simultáneamente,
por ejemplo 8 bits.
- Serie: El bus solamente
es capaz de transferir
los datos bit a bit. Es
decir, el bus tiene un
único cable que transmite
la información.
- Existen dos tipos
de transferencia
en los buses:
- Es un sistema digital que transfiere datos entre los
componentes de una computadora o entre varias
computadoras. Está formado por cables o pistas en
un circuito impreso, dispositivos como resistores y
condensadores además de circuitos integrados.1
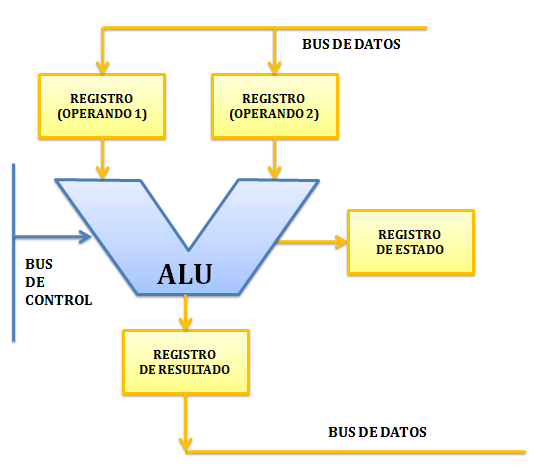
- 1.2.- Unidades aritmética lógica.
- También llamado coprocesador matemático. es un
circuito digital que calcula operaciones aritméticas
(como suma, resta, multiplicación, etc.) y
operaciones lógicas (si, y, o, no), entre valores
(generalmente uno o dos) de los argumentos.
- También llamado coprocesador matemático. es un
circuito digital que calcula operaciones aritméticas
(como suma, resta, multiplicación, etc.) y
operaciones lógicas (si, y, o, no), entre valores
(generalmente uno o dos) de los argumentos.
- 1.3.- Registros.
- un registro es una memoria de alta
velocidad y poca capacidad, integrada
en el microprocesador, que permite
guardar transitoriamente y acceder a
valores muy usados, generalmente en
operaciones matemáticas.
- Tipos de registros
- Los registros de datos se usan para
guardar números enteros. En algunas
computadoras antiguas, existía un único
registro donde se guardaba toda la
información, llamado acumulador.
- Los registros de memoria se usan para
guardar exclusivamente direcciones de
memoria. Eran muy usados en la
arquitectura Harvard, ya que muchas veces
las direcciones tenían un tamaño de
palabra distinto que los datos.
- Los registros de propósito general (en
inglés GPRs o General Purpose
Registers) pueden guardar tanto
datos como direcciones. Son
fundamentales en la arquitectura de
von Neumann. La mayor parte de las
computadoras modernas usa GPR.
- Los registros de coma flotante
se usan para guardar datos en
formato de coma flotante.
- Los registros constantes
tienen valores creados
por hardware de sólo
lectura. Por ejemplo, en
MIPS el registro cero
siempre vale 0.
- Los registros de propósito específico
guardan información específica del
estado del sistema, como el puntero
de pila o el registro de estado.
- Los registros de datos se usan para
guardar números enteros. En algunas
computadoras antiguas, existía un único
registro donde se guardaba toda la
información, llamado acumulador.
- un registro es una memoria de alta
velocidad y poca capacidad, integrada
en el microprocesador, que permite
guardar transitoriamente y acceder a
valores muy usados, generalmente en
operaciones matemáticas.
- 1.4.- Lógica de control.
- Su función es buscar las instrucciones
en la memoria principal, decodificarlas
(interpretación) y ejecutarlas, empleando
para ello la unidad de proceso.
- Clasificación
- Las cableadas, usadas en computadoras por
lógica secuencial y arquitectura fija, los
componentes principales son por tanto, un
circuito secuencial, el de control de estado, el
de lógica combinacional y el de emisión de
reconocimiento de las señales de control.
- Las microprogramadas.- usadas en maquinas
informáticas por la sencillez de su estructura, se
orienta a arquitecturas RISC; la micro programación
de la unidad de control se almacena en la
micromemoria, a la cual se accede de manera
secuencial (1, ,2, ,3, 4, .. n-2, n-1 - n) que serán
ejecutadas acorde con las microinstrucciones.
- Las cableadas, usadas en computadoras por
lógica secuencial y arquitectura fija, los
componentes principales son por tanto, un
circuito secuencial, el de control de estado, el
de lógica combinacional y el de emisión de
reconocimiento de las señales de control.
- Clasificación
- Su función es buscar las instrucciones
en la memoria principal, decodificarlas
(interpretación) y ejecutarlas, empleando
para ello la unidad de proceso.
- 1.5.- El módulo de control.
- Un módulo de control electrónico, también denominado
unidad de control electrónica, es el sistema integrado que
se utiliza para controlar las funciones del sistema eléctrico.
Un sistema integrado es un sistema de computadora que
consta de piezas mecánicas y de herramientas utilizadas
para realizar una o varias funciones dedicadas.
- Funcion: El módulo de control electrónico
funciona con un control de lazo cerrado o
un tipo de esquema de control diseñado
para monitorizar las salidas de un sistema
para controlar entradas enviadas al
sistema. El módulo de control electrónico
recibe datos a través de docenas de
sensores en los sistemas eléctricos y
realiza cálculos para determinar factores
tales como el temporizador de encendido y
el tiempo en que debe permanecer abierto.
- Memoria: Un módulo de control electrónico moderno
típico contiene un procesador de 32-bit o 32
unidades básicas de datos informáticos. El código
utilizado en un módulo de control electrónico común
consume menos de un megabyte o 1.048.576 bytes
de memoria. Los programas en una computadora
promedio contienen al menos 2 gigabytes de código,
más de 2.000 veces la cantidad de un módulo de
control electrónico.
- Funcion: El módulo de control electrónico
funciona con un control de lazo cerrado o
un tipo de esquema de control diseñado
para monitorizar las salidas de un sistema
para controlar entradas enviadas al
sistema. El módulo de control electrónico
recibe datos a través de docenas de
sensores en los sistemas eléctricos y
realiza cálculos para determinar factores
tales como el temporizador de encendido y
el tiempo en que debe permanecer abierto.
- Un módulo de control electrónico, también denominado
unidad de control electrónica, es el sistema integrado que
se utiliza para controlar las funciones del sistema eléctrico.
Un sistema integrado es un sistema de computadora que
consta de piezas mecánicas y de herramientas utilizadas
para realizar una o varias funciones dedicadas.
- 1.6.- Microprogramador.
- Es un circuito integrado programable, capaz
de ejecutar las órdenes grabadas en su
memoria. Está compuesto de varios
bloques funcionales, los cuales cumplen
una tarea específica.
- Es un circuito integrado programable, capaz
de ejecutar las órdenes grabadas en su
memoria. Está compuesto de varios
bloques funcionales, los cuales cumplen
una tarea específica.
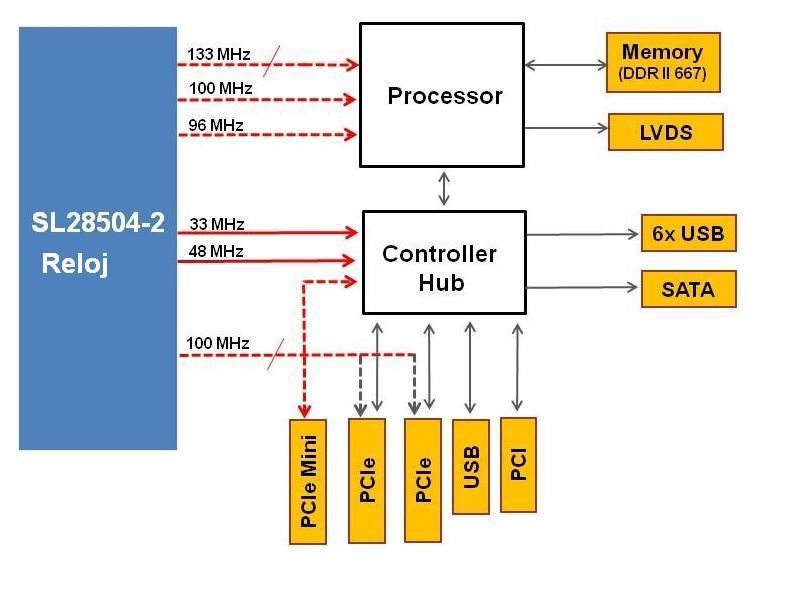
- 1.7.- La señal de reloj
- Es en la electrónica digital una señal
binaria, que sirve para coordinar las
acciones de varios circuitos, en especial
para la sincronización de biestables en
sistemas digitales complejos. Según su
aplicación, la señal de reloj se puede
repetir con una frecuencia predefinida o
también ser aperiódica.
- Es en la electrónica digital una señal
binaria, que sirve para coordinar las
acciones de varios circuitos, en especial
para la sincronización de biestables en
sistemas digitales complejos. Según su
aplicación, la señal de reloj se puede
repetir con una frecuencia predefinida o
también ser aperiódica.
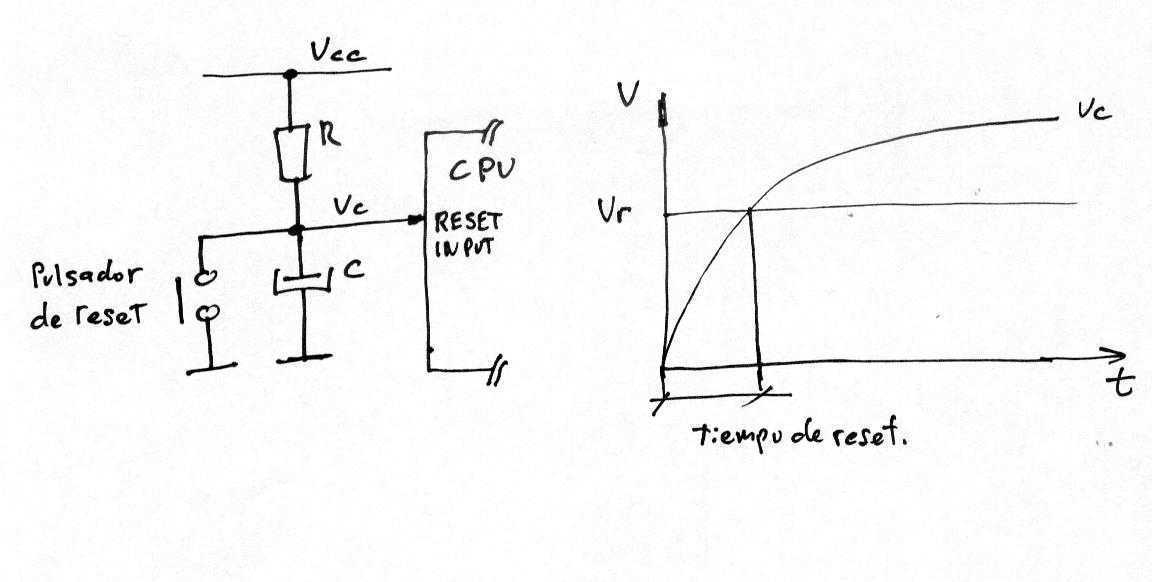
- 1.8.- La señal de reset.
- Se conoce como reset a la puesta en
condiciones iniciales de un sistema. Este
puede ser mecánico, electrónico o de otro
tipo. Normalmente se realiza al conectar el
mismo, aunque, habitualmente, existe un
mecanismo, normalmente un pulsador, que
sirve para realzar la puesta en condiciones
iniciales manualmente. En el ámbito de
códigos binarios, trata de poner a 0, así
como set, poner a 1. resetearlo (reset).
- Se conoce como reset a la puesta en
condiciones iniciales de un sistema. Este
puede ser mecánico, electrónico o de otro
tipo. Normalmente se realiza al conectar el
mismo, aunque, habitualmente, existe un
mecanismo, normalmente un pulsador, que
sirve para realzar la puesta en condiciones
iniciales manualmente. En el ámbito de
códigos binarios, trata de poner a 0, así
como set, poner a 1. resetearlo (reset).
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.