14632131
Description
Mind Map by Jack Fenix, updated more than 1 year ago
|
|
Created by Jack Fenix
over 6 years ago
|
|
Resolver problemas mediante busqueda
- Agentes resolventes - problemas
- Formulacion del objetivo
- Decidir
metas
- Decidir
metas
- Formulacion del problema
- Decidir acciones y estados a considerar
- Secuencia de acciones
- Busqueda
- Proceso de hallar una secuencia
- Proceso de hallar una secuencia
- Solucion
- Ejecucion
- Ejecutar las acciones que recomienda la solucion
- Ejecutar las acciones que recomienda la solucion
- Busqueda
- Secuencia de acciones
- Abstraccion
- Decidir acciones y estados a considerar
- Problemas y soluciones
- Estado inicial
- Funcion sucesor
- Espacio de estados
- Camino
- Secuencia de estados
- Secuencia de acciones
- Secuencia de estados
- Camino
- Espacio de estados
- Test objetivo
- Determina si un estado es un estado objetivo
- Determina si un estado es un estado objetivo
- Costo del camino
- Asigna un costo numérico a cada camino
- Costo individual de cada accion
- Costo individual de cada accion
- Asigna un costo numérico a cada camino
- Solucion optima
- Estado inicial
- Formulacion del objetivo
- Ejemplos de problemas
- Juguete
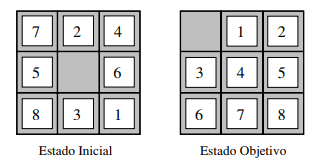
- 8 Puzle
- Alcanzar el estado objetivo deslizando las piezas
- Test para las IA
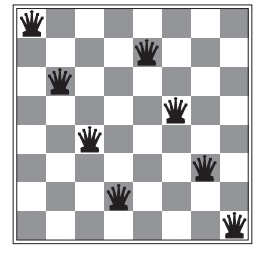
- 8 Reinas
- Colocar las ocho reinas en un tablero de ajedrez de
manera que cada reina no ataque a ninguna otra
- Test para los algoritmos de busqueda
- 8 Puzle
- Mundo real
- Problema de busqueda de una ruta
- Rutas en redes de computadoras
- Planificacion de operaciones militares
- Sistemas de planificación de viajes de líneas aéreas
- Rutas en redes de computadoras
- Ploblemas turisticos
- Relacionados con los problemas de búsqueda de
una ruta pero incluyen los anteriores destinos
- Relacionados con los problemas de búsqueda de
una ruta pero incluyen los anteriores destinos
- Problema del viajante de comercio
- Cada destino solo se visita una vez
- Encontrar viaje mas corto
- Cada destino solo se visita una vez
- Distribución VLSI
- Colocación de millones de componentes y de conexiones
en un chip verificando que el área es mínima
- Distribución de las celdas
- Dirección del canal
- Distribución de las celdas
- Colocación de millones de componentes y de conexiones
en un chip verificando que el área es mínima
- Navegación de un robot
- Se requiere es que las técnicas avanzadas
hagan el espacio de búsqueda finito
- Se requiere es que las técnicas avanzadas
hagan el espacio de búsqueda finito
- Secuenciación para el ensamblaje automático
- Lo principal es encontrar un orden en los objetos a ensamblar
- Lo principal es encontrar un orden en los objetos a ensamblar
- Búsqueda en Internet
- Búsqueda de respuestas a preguntas
- Búsqueda de respuestas a preguntas
- Problema de busqueda de una ruta
- Juguete
- Busqueda de soluciones
- Arbol de busqueda
- Nodo de busqueda
- Estado inicial
- Estado inicial
- Expandir
- Aplicar la función sucesor al estado actual
- Generar un nuevo conjunto de estados
- Aplicar la función sucesor al estado actual
- Estrategia de búsqueda
- Frontera
- Nodos que se han generado pero
todavía no se han expandido
- Nodos que se han generado pero
todavía no se han expandido
- Hoja
- Nodo sin sucesor
- Nodo sin sucesor
- Nodo de busqueda
- Medir rendimiento
- Completitud
- El algoritmo encontrara
solucion cuando exista
- El algoritmo encontrara
solucion cuando exista
- Optimización
- Encuentra la solucion optima
- Encuentra la solucion optima
- Complejidad en tiempo
- Cuánto tarda en
encontrar una solución
- Cuánto tarda en
encontrar una solución
- Complejidad en espacio
- Cuánta memoria se necesita
para el funcionamiento
- Cuánta memoria se necesita
para el funcionamiento
- Completitud
- Estrategias de búsqueda no informada
- No se tiene información adicional acerca de los estados
más allá de la que proporciona la definición del problema
- Primero en anchura
- Se expande primero el nodo raíz, a
continuación se expanden todos sus sucesores
- Necesita mucha memoria
- Dura mas que los otros metodos
- Se expande primero el nodo raíz, a
continuación se expanden todos sus sucesores
- Costo uniforme
- Expande el nodo n con el camino de costo más pequeño
- Está dirigida por los costos de los caminos
- Expande el nodo n con el camino de costo más pequeño
- Primero en profundidad
- Siempre expande el nodo más profundo en
la frontera actual del árbol de búsqueda
- Utiliza poca memoria
- Variante busqueda hacia atras
- Siempre expande el nodo más profundo en
la frontera actual del árbol de búsqueda
- Profundidad limitada
- Los nodos a profundidad L se tratan
como si no tuvieran ningún sucesor
- Los nodos a profundidad L se tratan
como si no tuvieran ningún sucesor
- Primero en profundidad con profundidad iterativa
- Se hace aumentando gradualmente el límite
hasta que se encuentra un objetivo
- Se hace aumentando gradualmente el límite
hasta que se encuentra un objetivo
- Bidireccional
- Ejecutar dos búsquedas simultáneas: una
hacia delante desde el estado inicial y la otra
hacia atrás desde el objetivo, parando cuando
las dos búsquedas se encuentren en el centro
- Ejecutar dos búsquedas simultáneas: una
hacia delante desde el estado inicial y la otra
hacia atrás desde el objetivo, parando cuando
las dos búsquedas se encuentren en el centro
- No se tiene información adicional acerca de los estados
más allá de la que proporciona la definición del problema
- Arbol de busqueda
- Evitar estados repetidos
- Dos rutas que llevan al mismo estado
- No hacerlo lleva a convertir problemas resolubles en irresolubles
- Dos rutas que llevan al mismo estado
- Búsqueda con información parcial
- Problemas sin sensores
- Si el agente no tiene ningún sensor, entonces (por lo que sabe) podría
estar en uno de los posibles estados iniciales, y cada acción por lo
tanto podría conducir a uno de los posibles estados sucesores
- Si el agente no tiene ningún sensor, entonces (por lo que sabe) podría
estar en uno de los posibles estados iniciales, y cada acción por lo
tanto podría conducir a uno de los posibles estados sucesores
- Problemas de contingencia
- Si el entorno es parcialmente observable o si las acciones
son inciertas, entonces las percepciones del agente
proporcionan nueva información después de cada acción
- Si el entorno es parcialmente observable o si las acciones
son inciertas, entonces las percepciones del agente
proporcionan nueva información después de cada acción
- Problemas de exploración
- Cuando se desconocen los estados y las acciones del
entorno, el agente debe actuar para descubrirlos
- Cuando se desconocen los estados y las acciones del
entorno, el agente debe actuar para descubrirlos
- Problemas sin sensores
Media attachments
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.