19444647
Description
Mind Map by NORAIZZA ZAPATA CORONEL, updated more than 1 year ago
|
|
Created by NORAIZZA ZAPATA CORONEL
about 5 years ago
|
|
Estática
- La Estática se define como parte de la
mecánica que estudia las
fuerzas aplicadas a cuerpos en
estado de equilibrio.
- Todas estas definiciones se basan en
la mecánica, se dividen en tres
Ramas:
- 1) Mecánica de los cuerpos
rígidos; 2) Mecánica de los
cuerpos deformables; 3)
Mecánica de fluidos.
- 1) Mecánica de los cuerpos
rígidos; 2) Mecánica de los
cuerpos deformables; 3)
Mecánica de fluidos.
- los conceptos fundamentales
que se emplean en la
Mecánica son:
- El espacio: Se refiere a la posición de una
partícula en tres dimensiones.
- El tiempo: Sirve para medir los
intervalos entre eventos.
- La masa: es una forma cuantitativa de
medir la resistencia de un cuerpo a ser
acelerado.
- La fuerza: es la acción sobre un cuerpo,
que se caracteriza por tener punto de
aplicación, magnitud, dirección y
sentido; por lo general, esta última
(fuerza) se representa mediante un
vector.
- El espacio: Se refiere a la posición de una
partícula en tres dimensiones.
- En la unidad 1 (Estática) se
encuentra Las leyes de Newton
que se refieren al movimiento
de las partículas y son:
- 1ra Ley: también conocida como la Ley de
Inercia, es decir, Una partícula
permanecerá en reposo o se moverá a
velocidad constante si la resultante de las
fuerzas que actúan sobre ella es cero.
- 2da Ley: también conocida como Ley Fundamental de
la Dinámica, es decir, Si la resultante de las
fuerzas que actúan sobre una partícula es
diferente de cero, la partícula tendrá una
aceleración proporcional a la magnitud de la
resultante y en el sentido de esta.
- Se representa mediante la expresión: F = m*a
- Se representa mediante la expresión: F = m*a
- 3ra Ley: también conocida como
Principio de acción y reacción dice que
A toda acción corresponde una
reacción de igual magnitud, pero de
sentido contrario.
- 1ra Ley: también conocida como la Ley de
Inercia, es decir, Una partícula
permanecerá en reposo o se moverá a
velocidad constante si la resultante de las
fuerzas que actúan sobre ella es cero.
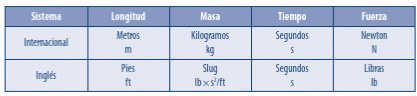
- Sistemas de Unidades: el SI se utiliza para
medir la longitud en metros (m), la masa en
kilogramos (kg), el tiempo en segundos (s) y
la fuerza en Newtons (N).
- Las unidades fundamentales del SI son
kg, m y s; la unidad de fuerza es
derivada y se obtiene por medio de la
2 a ley donde para acelerar 1 kg 1 m/s
2 se necesita aplicar una fuerza de 1 N.
F =1 kg (9.807 m/s²) = 9.81 N
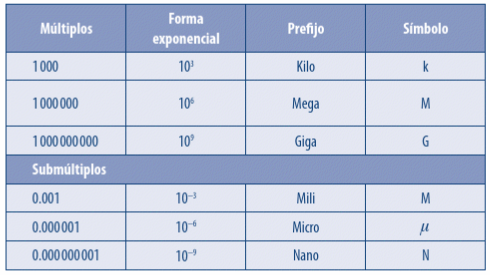
- Cuando las cantidades numéricas son
demasiado grandes o pequeñas, se
pueden usar prefijos como los que se
listan en la siguiente tabla:
- Cuando las cantidades numéricas son
demasiado grandes o pequeñas, se
pueden usar prefijos como los que se
listan en la siguiente tabla:
- Las unidades fundamentales del SI son
kg, m y s; la unidad de fuerza es
derivada y se obtiene por medio de la
2 a ley donde para acelerar 1 kg 1 m/s
2 se necesita aplicar una fuerza de 1 N.
F =1 kg (9.807 m/s²) = 9.81 N
- Conversión de unidades: En ocasiones, para
solucionar un problema, es necesario
convertir algunas unidades de un sistema a
otro, a fin de que exista congruencia;
asimismo, también es necesario convertir
algunas unidades a su forma básica, para
obtener unidades derivadas, como el Newton
(N).
- Vectores: es una representación gráfica que
describe una cantidad física, como el peso de un
objeto, la tensión en un cable, el empuje sobre
un cuerpo, el desplazamiento, la velocidad, la
aceleración, la posición, la fuerza y el momento.
- Magnitud . Determina la longitud de la
flecha (vector) correspondiente y se
representa con una línea.
- Origen del vector . Punto de inicio.
- Dirección . Orientación definida por el
ángulo que forma el vector con un eje
de referencia del sistema cartesiano.
- Sentido . Se representa con una flecha
situada en un extremo de la línea, la
cual indica hacia dónde se dirige el
vector.
- Sentido . Se representa con una flecha
situada en un extremo de la línea, la
cual indica hacia dónde se dirige el
vector.
- Dirección . Orientación definida por el
ángulo que forma el vector con un eje
de referencia del sistema cartesiano.
- Origen del vector . Punto de inicio.
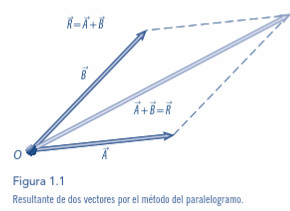
- Suma de vectores Existen dos formas
de sumar vectores:
- Método del
paralelogramo
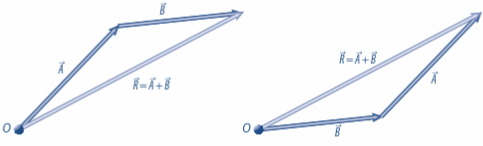
- Regla del triángulo
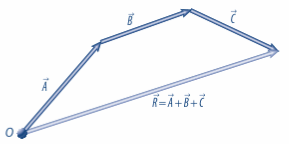
- Método del polígono
- Componentes rectangulares
- Método del
paralelogramo
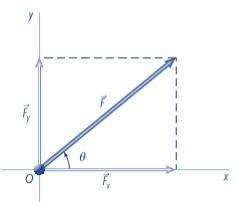
- Componentes rectangulares de un vector en el
plano: Si se utiliza un marco de referencia,
como el plano cartesiano xy , las componentes
rectangulares se pueden representar por medio
el uso de la trigonometría como la proyección
del vector sobre los ejes x y y
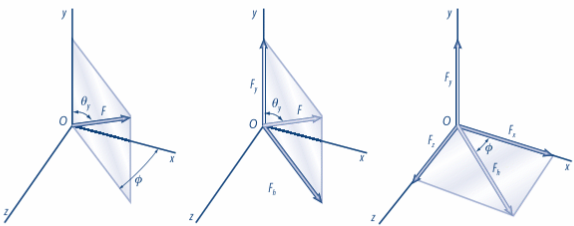
- Componentes rectangulares de un vector en el
espacio: la Figura representa las componentes
rectangulares de un vector F en el espacio, donde F
muestra la proyección vertical sobre el eje y , y F
muestra la proyección sobre un plano horizontal xz . El
vector F se proyecta nuevamente sobre los ejes x y z ,
obteniendo las componentes Fx y Fy .
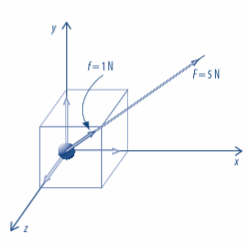
- Vectores unitarios: es aquel que
posee las mismas propiedades que su
vector original, pero su magnitud es la
unidad, por lo que su dirección y
sentido permanecen iguales.
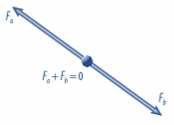
- Equilibrio de la partícula Se
dice que una partícula se
encuentra en equilibrio si la
resultante de las fuerzas que
actúan sobre esta es cero; es
decir, se contrarrestan.
- Magnitud . Determina la longitud de la
flecha (vector) correspondiente y se
representa con una línea.
- Todas estas definiciones se basan en
la mecánica, se dividen en tres
Ramas:
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.