
3388705
Description
Mind Map by juan pablo gacrc, updated more than 1 year ago

|
|
Created by juan pablo gacrc
over 9 years ago
|
|
position, orientation, and location of a
rigid body
- the study of the kinematics of robot manipulators, we are constantly dealing with the location of
several bodies in space, the bodies of interest include the links of a manipulator, the tools, the
workpieces, and so on
- of a body with respect to a reference coordinate system is known if the position of the body are
known. if the body of interest is rigid, six independent parameters would be sufficient to describe its
location in three dimensional space
- as shown in
- as shown in
- of a body with respect to a reference coordinate system is known if the position of the body are
known. if the body of interest is rigid, six independent parameters would be sufficient to describe its
location in three dimensional space
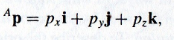
- descriiption of position
- of any point eith respect to reference frame
can be described by a 3*1 position vector
- of any point eith respect to reference frame
can be described by a 3*1 position vector
- description of an
orientation
- angle representations
- the direction cosine representation of an orientation contains nine parameters, and
the screw representation requires four
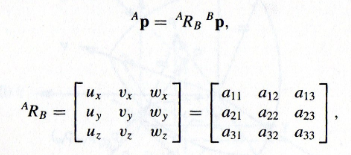
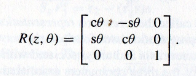
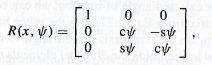
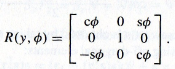
- the rotation matrix
- the resulting rotation matrix is obtained by
premultiplying three basic rotation matrices
- the equivalent roll-pitch-yaw angeles as follows
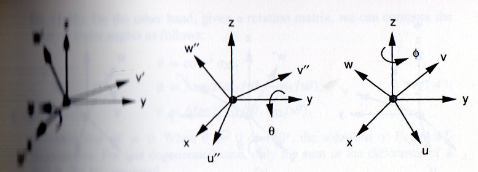
- successive rotations about the moving coordinate axes
- hence the overall rotation matrix
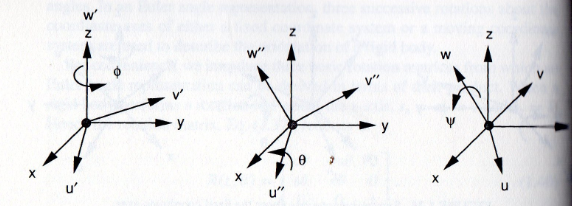
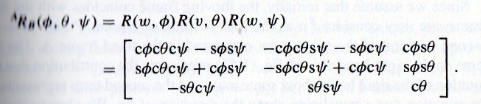
- we can expand
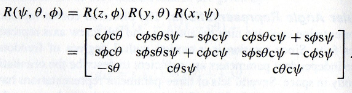
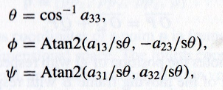
- euler angles as follows
- the resulting rotation matrix is obtained by a
postmultiplication of three basic rotation matrices as
follows
- the resulting rotation matrix is obtained by a
postmultiplication of three basic rotation matrices as
follows
- euler angles as follows
- we can expand
- hence the overall rotation matrix
- successive rotations about the moving coordinate axes
- the equivalent roll-pitch-yaw angeles as follows
- the resulting rotation matrix is obtained by
premultiplying three basic rotation matrices
- the rotation matrix
- the direction cosine representation of an orientation contains nine parameters, and
the screw representation requires four
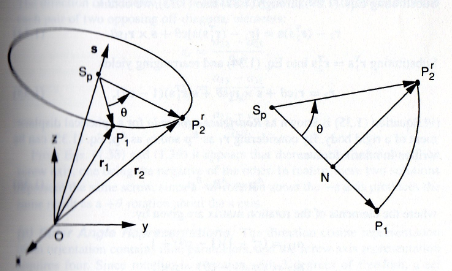
- axis representation
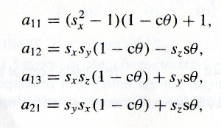
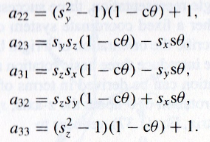
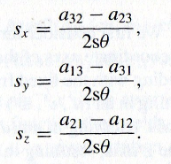
- we seek a description of de orientation of a rigid body in terms of a rotation about a sceww axis
- were the elements of the ratation matrix are given by
- it appears that there are two solutions of the serew axis
- it appears that there are two solutions of the serew axis
- were the elements of the ratation matrix are given by
- we seek a description of de orientation of a rigid body in terms of a rotation about a sceww axis
- direction cosine representation
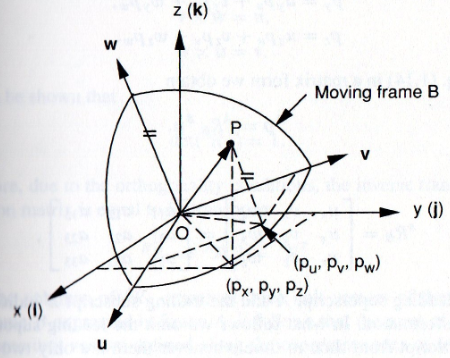
- one convenient way of describing the orientation of a rigid body is by means
of the direction cosines of the coordinate axes of the moving frame with
respect to the fixed frame, three unit vectors pointing along the coordinate
axes of the moving frame B, respectively, as shown in fig.
- the position vector os a point P, and the rotated frame B
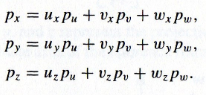
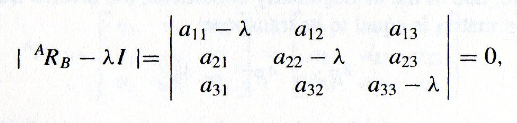
- equating x,y,z componets of aP, to the coresponding componets
- matrix from we obtain
- the determinant of the coefficients must
vanish
- matrix from we obtain
- equating x,y,z componets of aP, to the coresponding componets
- the position vector os a point P, and the rotated frame B
- one convenient way of describing the orientation of a rigid body is by means
of the direction cosines of the coordinate axes of the moving frame with
respect to the fixed frame, three unit vectors pointing along the coordinate
axes of the moving frame B, respectively, as shown in fig.
- angle representations
- description of a location
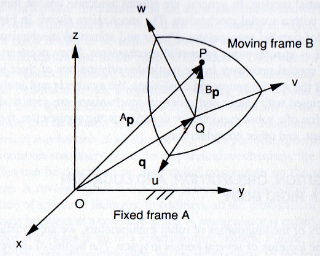
- as a pointed out earlier, the location of the rigid body can be described
by the position of the origin Q and the orientation of the moving frame
with respect in the dixed frame
- as a pointed out earlier, the location of the rigid body can be described
by the position of the origin Q and the orientation of the moving frame
with respect in the dixed frame
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
0 comments
Want to create your own Mind Maps for free with GoConqr? Learn more.