3602337
Description
Mind Map by alvarovillamompo, updated more than 1 year ago
|
|
Created by alvarovillamompo
about 9 years ago
|
|
Sistemas de Transmisión de Velocidad
y Potencia
- MECANISMOS: Un es un dispositivo que
transforma el movimiento producido por un
elemento motriz (fuerza de entrada) en un
movimiento deseado de salida (fuerza de salida)
llamado elemento conducido.
- Existen dos grupos de mecanismos: 1.
Mecanismos de transmisión del
movimiento. 2. Mecanismos de
transformación del movimiento.
- Los mecanismos de transmisión son
aquellos en los que el elemento motriz (o
de entrada) y el elemento conducido (o de
salida) tienen el mismo tipo de
movimiento.
- Los mecanismos de
transformación son aquellos
en los que el elemento motriz
y el conducido tienen distinto
tipo de movimiento.
- Los mecanismos de transmisión son
aquellos en los que el elemento motriz (o
de entrada) y el elemento conducido (o de
salida) tienen el mismo tipo de
movimiento.
- Existen dos grupos de mecanismos: 1.
Mecanismos de transmisión del
movimiento. 2. Mecanismos de
transformación del movimiento.
- Mecanismos de transmisión del movimiento
- Como su nombre indica, transmiten el
movimiento desde un punto hasta otro
distinto, siendo en ambos casos el mismo
tipo de movimiento. Tenemos, a su vez, dos
tipos:
- Mecanismos de transmisión lineal: en
este caso, el elemento de entrada y el de
salida tienen movimiento lineal.
- Mecanismos de
transmisión circular: en este
caso, el elemento de
entrada y el de salida tienen
movimiento circular.
- Mecanismos de transmisión lineal: en
este caso, el elemento de entrada y el de
salida tienen movimiento lineal.
- Tipos: a) Palanca: Mecanismo de transmisión
lineal. b) Sistema de poleas: Mecanismo de
transmisión lineal. c) Sistema de poleas con
correa. Mecanismo de transmisión circular. d)
Sistema de ruedas de fricción: Mecanismo de
transmisión circular. e) Sistema de engranajes:
Mecanismo de transmisión circular.
- I. Palanca Es un sistema de transmisión lineal. La palanca es una barra
rígida que gira en torno a un punto de apoyo o articulación. Es un punto de
la barra se aplica una fuerza F con el fin de vencer una resistencia R. La ley
de la palanca dice: Una palanca está en equilibrio cuando el producto de la
fuerza F, por su distancia d, al punto de apoyo es igual al producto de la
resistencia R por su distancia r, al punto de apoyo. F·d = R·r
- II. Sistemas de poleas Una polea es
una rueda con una ranura que gira
alrededor de un eje por la que se hace
pasar una cuerda que permite vencer
una resistencia R de forma cómoda
aplicando una fuerza F. De este modo
podemos elevar pesos hasta cierta
altura. Es un sistema de transmisión
lineal, pues el movimiento de entrada
y salida es lineal. Tenemos tres casos:
- a) Polea fija: La polea fija, como su nombre
indica consta de una sola polea fija a algún
lugar. La fuerza F que debo aplicar para vencer
una resistencia R es tal que: Fuerza = Resistencia
Así, si quiero levantar 40 kg de peso, debo hacer
una fuerza de 40 kg. No gano nada, pero es más
cómodo.
- b) Polea móvil Es un conjunto de dos poleas, una de las
cuales es fija y la otra móvil. En una polea móvil la fuerza F
que debo hacer para vencer una resistencia R se reduce a la
mitad. Por ello, este tipo de poleas permite elevar más peso
con menos esfuerzo. F=R/2 Así, si quiero levantar 40 kg de
peso, me basta hacer una fuerza de 20 kg.
- c) Polipasto Es un tipo de polea móvil
con un número par de poleas, la mitad
son fijas y la otra mitad son móviles. En
un polipasto, si quiero vencer una
resistencia R debo hacer una fuerza
mucho menor, de modo que: P=R/2^n
Donde n es el número de poleas
móviles.
- a) Polea fija: La polea fija, como su nombre
indica consta de una sola polea fija a algún
lugar. La fuerza F que debo aplicar para vencer
una resistencia R es tal que: Fuerza = Resistencia
Así, si quiero levantar 40 kg de peso, debo hacer
una fuerza de 40 kg. No gano nada, pero es más
cómodo.
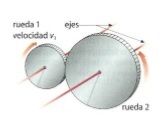
- III. Sistema de ruedas de fricción Consisten en dos ruedas
que se encuentran en contacto. Es un sistema de transmisión
circular. Pues la rueda de entrada (motriz) transmite el
movimiento circular a una rueda de salida (conducida). El
sentido de giro de la rueda conducida es contrario al de la
rueda motriz y, siempre, la rueda mayor gira a menor
velocidad que la otra. No están muy extendidas porque son
incapaces de transmitir mucha potencia, pues se corre el
riesgo de que patinen las ruedas.
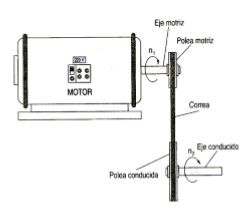
- IV. Sistemas de poleas con correa. Se trata de dos
ruedas situadas a cierta distancia, que giran a la vez por
efecto de una correa. Las correas suelen ser cintas de
cuero flexibles y resistentes. Según el tamaño de las
poleas tenemos dos tipos
- 1. Sistema reductor de
velocidad: En este caso, la
velocidad de la polea
conducida ( o de salida) es
menor que la velocidad de
la polea motriz (o de salida).
Esto se debe a que la polea
conducida es mayor que la
polea motriz.
- 2. Sistema multiplicador de velocidad: En
este caso, la velocidad de la polea conducida
es mayor que la velocidad de la polea motriz.
Esto se debe a que la polea conducida es
menor que la polea motriz.
- La velocidad de las ruedas se mide normalmente en revoluciones por minuto (rpm) o vueltas por
minuto. Definición: Definimos la relación de transmisión (i) como la relación que existe entre la
velocidad de la polea salida (n2) y la velocidad de la polea de entrada (n1). i = n2/ n1 La relación de
transmisión, como su nombre indica, es una relación de dos cifras, no una división. Ejemplo 1 :
Supongamos un sistema reductor de modo que n1 = velocidad de la polea motriz (entrada) es de 400
rpm. n2 = velocidad de la polea motriz (entrada) es de 100 rpm. En este caso, la relación de
transmisión es: i = n2/ n1 = 100/400 = ¼ (tras simplificar) Una relación de transmisión 1:4 significa
que la velocidad de la rueda de salida es cuatro veces menor que la de entrada. Ejemplo 2 :
Supongamos un sistema multiplicador de modo que n1 = velocidad de la polea motriz (entrada) es de
100 rpm. n2 = velocidad de la polea conducida (salida) es de 500 rpm. En este caso, la relación de
transmisión es: i = n2/
- 1. Sistema reductor de
velocidad: En este caso, la
velocidad de la polea
conducida ( o de salida) es
menor que la velocidad de
la polea motriz (o de salida).
Esto se debe a que la polea
conducida es mayor que la
polea motriz.
- V. Transmisión por engranajes Los engranajes son ruedas dentadas que encajan entre sí, de modo
que, unas ruedas transmiten el movimiento circular a las siguientes. El tamaño de los dientes de
todos los engranajes debe ser igual. Los engranajes giran de modo que, los más pequeños giran a
mayor velocidad, de modo similar al caso del sistema de poleas con correa. En este caso, en lugar de
tener en cuenta el diámetro de la polea, se tienen el cuenta el número de dientes de cada rueda.
- Se puede calcular las velocidad de los engranajes a partir de los
tamaños de las mismas n1·Z1 = n2·Z2 Siendo: n1 = velocidad del
engranaje de entrada n2 = velocidad del engranaje de salida Z1
= número de dientes del engranaje de entrada Z2 = número de
dientes del engranaje de salida
- La relación de transmisión (i) en un sistema de
engranajes se puede calcular del siguiente
modo: i = Z1/ Z2 o también como … i = n2/ n1
- Al igual que con el sistema de poleas con correa, hay dos tipos de sistemas
de transmisión por engranajes. a) Reductor: El piñón es el engranaje motriz
y la rueda es el engranaje conducido. En este caso, la velocidad de salida
(rueda) es menor que la velocidad de entrada (piñón). b) Multiplicador: El
piñón es el engranaje conducido y la rueda es el engranaje motriz. En este
caso, la velocidad de salida (piñón) es mayor que la velocidad de entrada
(rueda).
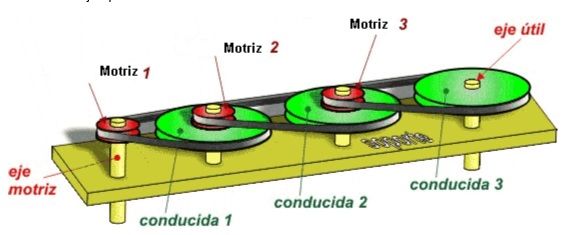
- Tren de sistema de poleas y engranajes Un tren de un sistema de poleas con correa consiste en la
combinación de más de dos poleas.
- La rueda de entrada del sistema de poleas es la motriz 1 y la
rueda de salida es la conducida 3. En este caso hay cuatro ejes
de transmisión. El movimiento circular del eje motriz se
transmite al eje 2 a través de la polea motriz 1 y la conducida 1.
Las poleas motriz 2 y conducida 1 está acopladas al mismo eje,
giran a igual velocidad. La polea motriz 2 transmite el
movimiento a la conducida 2 gracias a la acción de otra correa.
Las poleas motriz 3 y conducida 2 giran a igual velocidad
porque comparten el mismo eje. Por último y gracias a una
tercera correa el movimiento circular se transmite desde la
motriz 3 a la conducida3.
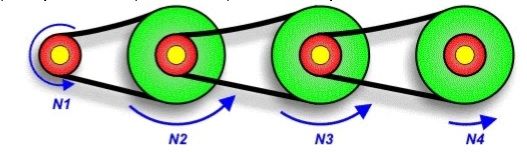
- Se puede observar el movimiento circular se va reduciendo más a medida que añadimos más
poleas y más correas, pues el tren de poleas lo constituyen en realidad tres reductores. n1 =
velocidad de la polea motriz 1 n2 = velocidad de la polea conducida 1 = velocidad de la polea
motriz 2 n3 = velocidad de la polea conducida 2 =velocidad de la polea motriz 3 n4 = velocidad
de la polea conducida 3 La relación de transmisión del sistema es… i = n4/ n1
- Se puede hallar esta relación de transmisión a partir de la
relación de transmisión de cada par de poleas i = i1· i2· i3
Ejemplo polea siendo i1 = n2/ n1 = d1/ d2 i2 = n3/ n2 = d2/ d3
i3 = n4/ n3 = d3/ d4 Si solo tenemos los diámetros de las
poleas, se puede calcular la relación de transmisión con la
expresión
- La rueda de entrada del sistema de poleas es la motriz 1 y la
rueda de salida es la conducida 3. En este caso hay cuatro ejes
de transmisión. El movimiento circular del eje motriz se
transmite al eje 2 a través de la polea motriz 1 y la conducida 1.
Las poleas motriz 2 y conducida 1 está acopladas al mismo eje,
giran a igual velocidad. La polea motriz 2 transmite el
movimiento a la conducida 2 gracias a la acción de otra correa.
Las poleas motriz 3 y conducida 2 giran a igual velocidad
porque comparten el mismo eje. Por último y gracias a una
tercera correa el movimiento circular se transmite desde la
motriz 3 a la conducida3.
- Se puede calcular las velocidad de los engranajes a partir de los
tamaños de las mismas n1·Z1 = n2·Z2 Siendo: n1 = velocidad del
engranaje de entrada n2 = velocidad del engranaje de salida Z1
= número de dientes del engranaje de entrada Z2 = número de
dientes del engranaje de salida
- VII. Engranajes con cadena Este sistema de transmisión consiste en dos ruedas dentadas de ejes
paralelos, situadas a cierta distancia la una de la otra, y que giran a la vez por efecto de una cadena
que engrana a ambas. Es el mecanismo que emplean las bicicletas. La relación de transmisión se
calcula como en el caso de los engranajes.
- I. Palanca Es un sistema de transmisión lineal. La palanca es una barra
rígida que gira en torno a un punto de apoyo o articulación. Es un punto de
la barra se aplica una fuerza F con el fin de vencer una resistencia R. La ley
de la palanca dice: Una palanca está en equilibrio cuando el producto de la
fuerza F, por su distancia d, al punto de apoyo es igual al producto de la
resistencia R por su distancia r, al punto de apoyo. F·d = R·r
- Como su nombre indica, transmiten el
movimiento desde un punto hasta otro
distinto, siendo en ambos casos el mismo
tipo de movimiento. Tenemos, a su vez, dos
tipos:
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.