3860719
Description
Mind Map by wilson sanipatin, updated more than 1 year ago
|
|
Created by wilson sanipatin
over 9 years ago
|
|
Herramientas matemáticas para la
localización espacial
- manipulacion de piezas
- movimiento espacial del
extremo de un robot
- nesecidades y herramientas
matematicas para especificar
la posicion y orientacion
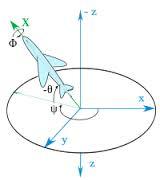
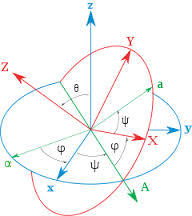
- Ángulos de euler
- Los ángulos de Euler constituyen un conjunto de tres coordenadas
angulares que sirven para especificar la orientación de un sistema de
referencia de ejes ortogonales, normalmente móvil, respecto a otro
sistema de referencia de ejes ortogonales normalmente fijos
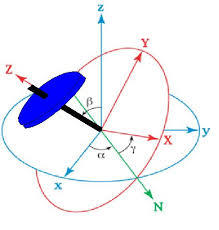
- Rotaciones de Euler
- Son los movimientos resultantes de variar
uno de los ángulos de Euler dejando fijos
los otros dos. Tienen nombres particulares:
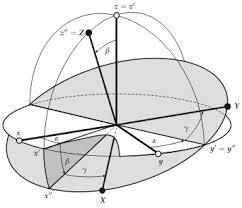
- Ejes de rotación fijos Sean los sistemas XYZ y xyz idénticos inicialmente.
Rotar el sistema XYZ alrededor del eje z en α; el sistema xyz no se mueve.
Rotarlo alrededor del eje x por β. Rotarlo respecto al eje z por γ.
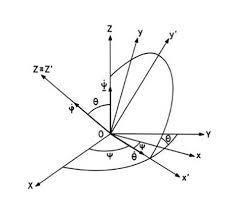
- Moviendo ejes de rotación Empezar con el sistema XYZ igual al sistema xyz.
Rotar el sistema XYZ respecto al eje Z en γ; el sistema xyz no se mueve. Rotarlo
respecto al ahora rotado eje X por β. Rotarlo ahora respecto al doblemente
rotado eje Z por α.
- Ejes de rotación fijos Sean los sistemas XYZ y xyz idénticos inicialmente.
Rotar el sistema XYZ alrededor del eje z en α; el sistema xyz no se mueve.
Rotarlo alrededor del eje x por β. Rotarlo respecto al eje z por γ.
- Matrices de rotación
- Basandonos en la relación entre los ángulos de Euler y el movimiento de los soportes
de Cardano, podemos ver que todo sistema de coordenadas puede describirse con los
tres ángulos de Euler. Si llamamos a la matriz de rotación tridimensional que
representa la transformación de coordenadas desde el sistema fijo al sistema móvil.
- Basandonos en la relación entre los ángulos de Euler y el movimiento de los soportes
de Cardano, podemos ver que todo sistema de coordenadas puede describirse con los
tres ángulos de Euler. Si llamamos a la matriz de rotación tridimensional que
representa la transformación de coordenadas desde el sistema fijo al sistema móvil.
- Son los movimientos resultantes de variar
uno de los ángulos de Euler dejando fijos
los otros dos. Tienen nombres particulares:
- Rotaciones de Euler
- Comparación entre métodos de localización espacial
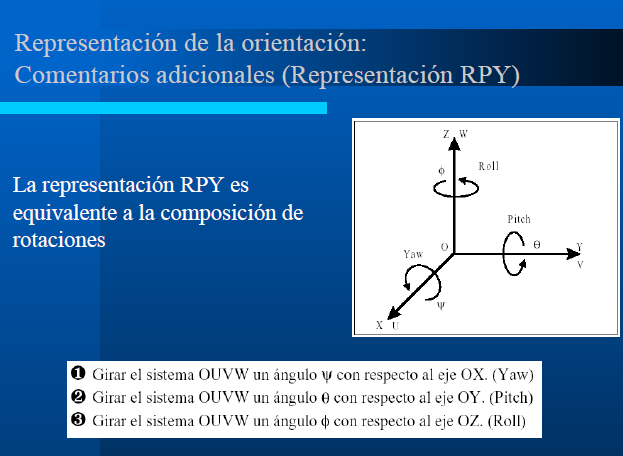
- Representacion de orientacion
- Los ángulos de Euler constituyen un conjunto de tres coordenadas
angulares que sirven para especificar la orientación de un sistema de
referencia de ejes ortogonales, normalmente móvil, respecto a otro
sistema de referencia de ejes ortogonales normalmente fijos
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.