5228872
Description
Mind Map by Johann Andrés Argüello CRUZ, updated more than 1 year ago
|
|
Created by Johann Andrés Argüello CRUZ
over 8 years ago
|
|
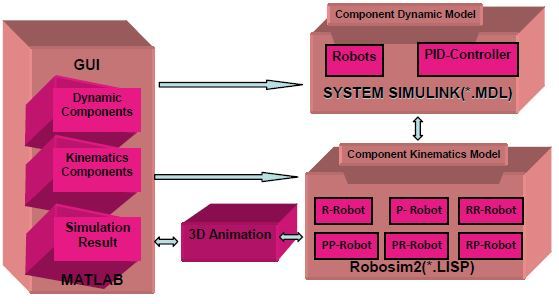
Dynamics and Kinematics Simulation for Robots
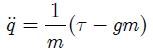
- Dynamic Simulation of Robot
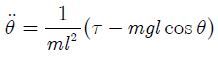
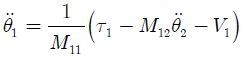
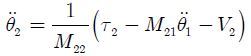
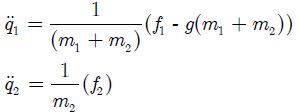
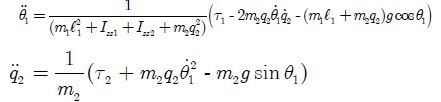
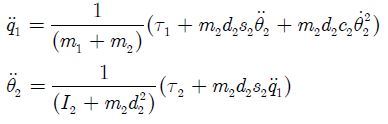
- Transfer Function equations of motion and to be
determined by Lagrange’s method/ Newton’s approach.
- R-Robot
- P-Robot
- 3R-Robot
- PP-Robot
- RP-Robot
- PR-Robot
- Transfer Function equations of motion and to be
determined by Lagrange’s method/ Newton’s approach.
- Johann Argüello. Manuela Beltran University
Conceptual Map
- Santichai Fueanggan, Somchart Chokchaitam.
Dept. Electrical and Computer Engineering.
Pathumthani, Thailand
- Forward Kinematics Simulation of Robots
- Robosim2 program the robot structure was designed using
the Denavit – Hartenberg transformation
- Robosim2 program the robot structure was designed using
the Denavit – Hartenberg transformation
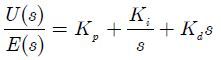
- Controller Model
- Transfer Function of a PID
- Transfer Function of a PID
- System Operation
- 3 main sections - data input, data
processing and result display
- 3 main sections - data input, data
processing and result display
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.