26058125
Description
Mind Map by Fernando Andrés Maya, updated more than 1 year ago
|
|
Created by Fernando Andrés Maya
about 4 years ago
|
|
Equilibrio de
cuerpos rígidos
- 2. Principio de
transmisibilidad
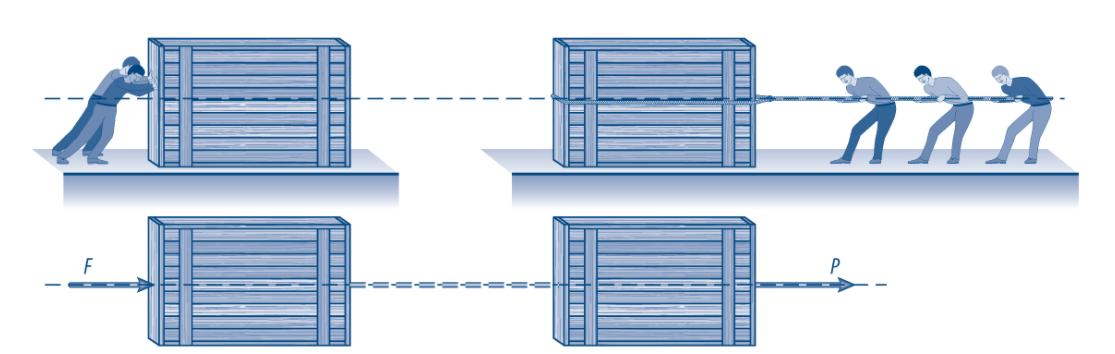
- Las condiciones de equilibrio o de movimiento de
un cuerpo rígido no se medicarán si al aplicar una
fuerza F en un determinado punto, con una
magnitud, dirección y sentido, es reemplazada por
otra fuerza P de igual magnitud, dirección y
sentido, pero aplicada en cualquier otro punto,
que pertenezca a la misma línea de acción dela
primera fuerza, A las fuerzas F y P se les llaman
equivalentes, pues causan el mismo electo sobre el
cuerpo rígido, sobre el cual actúan.
- Las condiciones de equilibrio o de movimiento de
un cuerpo rígido no se medicarán si al aplicar una
fuerza F en un determinado punto, con una
magnitud, dirección y sentido, es reemplazada por
otra fuerza P de igual magnitud, dirección y
sentido, pero aplicada en cualquier otro punto,
que pertenezca a la misma línea de acción dela
primera fuerza, A las fuerzas F y P se les llaman
equivalentes, pues causan el mismo electo sobre el
cuerpo rígido, sobre el cual actúan.
- 1. Estática de un
cuerpo rígido
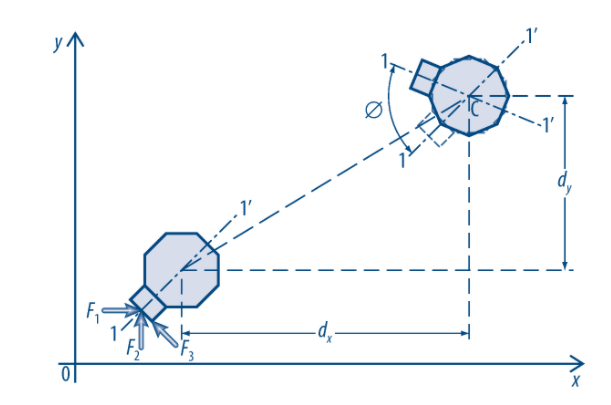
- Estudia la estática de los
cuerpos rígidos, los cuales
poseen forma y dimensiones.
Las fuerzas aplicadas sobre
los cuerpos rígidos ocasionan
que estos se desplacen y
giren alrededor de un punto
o de un eje.
- Se muestra la forma como las fuerzas F1,F2 y
F3 ocasionan los desplazamientos dx',dy', así
como un giro θ alrededor del eje Z, en el plano.
- Se muestra la forma como las fuerzas F1,F2 y
F3 ocasionan los desplazamientos dx',dy', así
como un giro θ alrededor del eje Z, en el plano.
- Estudia la estática de los
cuerpos rígidos, los cuales
poseen forma y dimensiones.
Las fuerzas aplicadas sobre
los cuerpos rígidos ocasionan
que estos se desplacen y
giren alrededor de un punto
o de un eje.
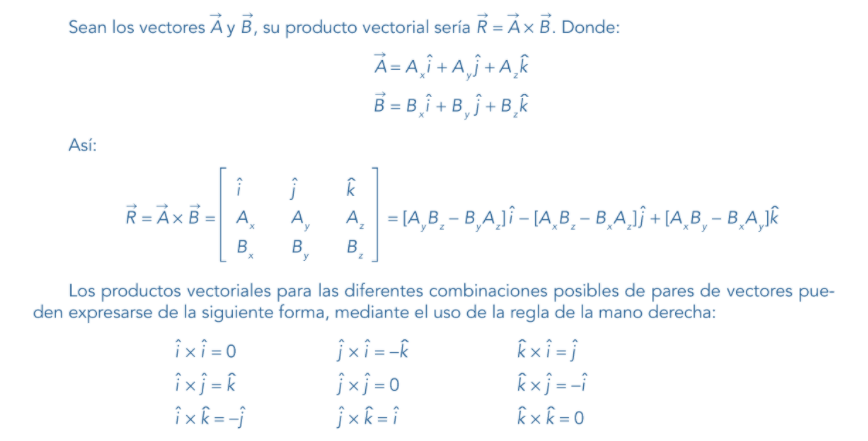
- 3. Producto
vectorial
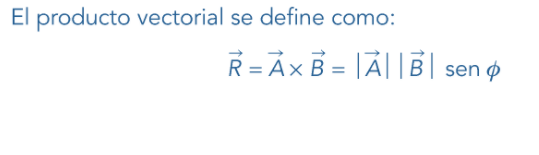
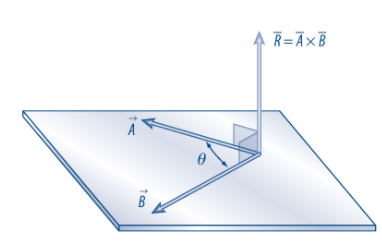
- Operación matemática mediante la cual es posible
multiplicar dos vectores; por lo común, se le conoce
como producto cruz (X), El resultado del producto
vectorial entre dos vectores que se encuentran
contenidos en un plano es otro vector
perpendicular a dicho plano, es decir un vector
ortogonal al plano, mismo que representa
geométricamente el área del paralelogramo y que
tiene por lados A y B.
- Operación matemática mediante la cual es posible
multiplicar dos vectores; por lo común, se le conoce
como producto cruz (X), El resultado del producto
vectorial entre dos vectores que se encuentran
contenidos en un plano es otro vector
perpendicular a dicho plano, es decir un vector
ortogonal al plano, mismo que representa
geométricamente el área del paralelogramo y que
tiene por lados A y B.
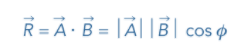
- 4. Producto
escalar
- Operación matemática por medio dela cual es
posible multiplicar dos vectores Por lo general,
a esta se le conoce como producto punto (JA El
resultado del producto escalar entre dos
vectores que se encuentran contenidos en un
plano es un escalar, es decir una magnitud
geométricamente, el producto escalar
permite encontrar la dirección entre vectores
en el espacio,
- El producto escalar se define como:
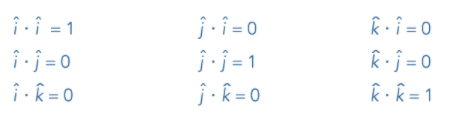
- Los productos escalares para las diferentes
combinaciones posibles de pares de vectores
pueden expresarse dela siguiente forma,
utilizando |a regla dela mano derecha:
- Los productos escalares para las diferentes
combinaciones posibles de pares de vectores
pueden expresarse dela siguiente forma,
utilizando |a regla dela mano derecha:
- El producto escalar se define como:
- Operación matemática por medio dela cual es
posible multiplicar dos vectores Por lo general,
a esta se le conoce como producto punto (JA El
resultado del producto escalar entre dos
vectores que se encuentran contenidos en un
plano es un escalar, es decir una magnitud
geométricamente, el producto escalar
permite encontrar la dirección entre vectores
en el espacio,
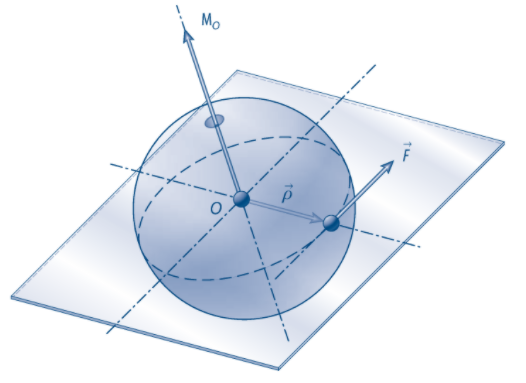
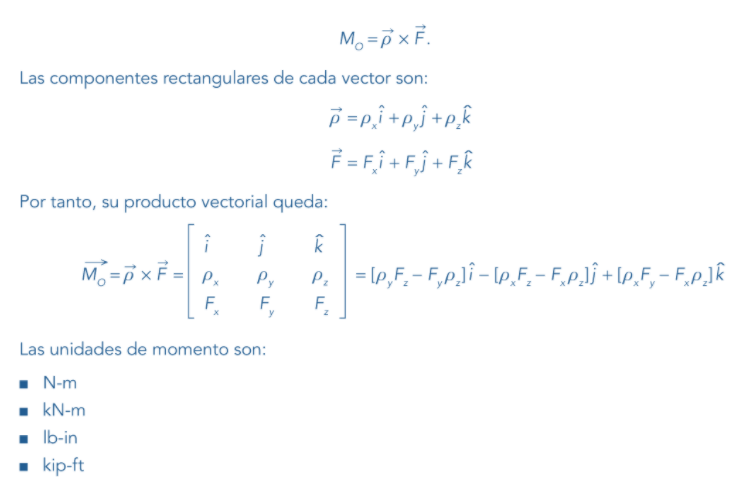
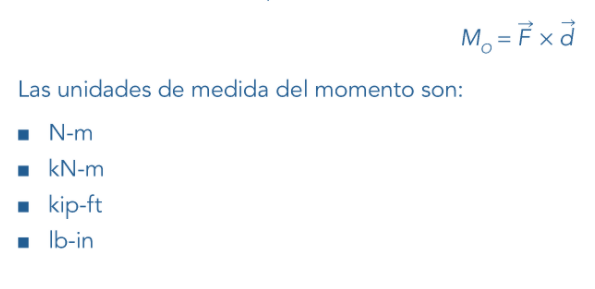
- 5. Momento de una fuerza
con respecto a un punto
- El efecto de aplicar una tuerza sobre
un cuerpo rígido produce que este
gire; dicho giro se conoce como
momento El giro o momento depende
del punto de aplicación de la tuerza,
su magnitud, su dirección y su
sentido, así como de un punto de
referencia fijo "O” t La trayectoria que
une al punto de referencia fijo con el
punto de aplicación de la tuerza es un
vector de posición al que se llama P
⃗Los dos vectores, P ⃗ y F ⃗, torman
un plano, por lo que su producto
vectorial proporciona el momento de
F con respecto a O.
- El efecto de aplicar una tuerza sobre
un cuerpo rígido produce que este
gire; dicho giro se conoce como
momento El giro o momento depende
del punto de aplicación de la tuerza,
su magnitud, su dirección y su
sentido, así como de un punto de
referencia fijo "O” t La trayectoria que
une al punto de referencia fijo con el
punto de aplicación de la tuerza es un
vector de posición al que se llama P
⃗Los dos vectores, P ⃗ y F ⃗, torman
un plano, por lo que su producto
vectorial proporciona el momento de
F con respecto a O.
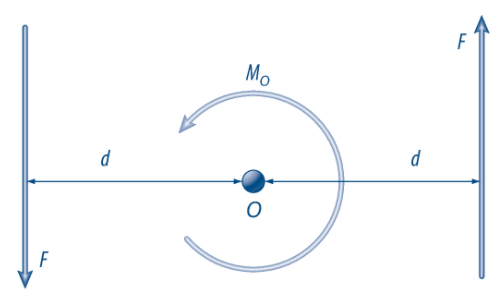
- 6. Momento de
un par
- Si se tienen dos tuerzas
F de igual magnitud y
dirección, pero de
sentidos opuestos,
aplicadas a una
distancia d de un punto
O, se dice que forman
un par o un giro.
- Por lo tanto queda definido como:
- Por lo tanto queda definido como:
- Si se tienen dos tuerzas
F de igual magnitud y
dirección, pero de
sentidos opuestos,
aplicadas a una
distancia d de un punto
O, se dice que forman
un par o un giro.
- 7. Sistema
equivalente de
fuerzas
- Dos sistemas de tuerza que
actúan sobre el mismo cuerpo
rígido son equivalentes si
producen el mismo efecto sobre
el mismo punto:
- Para su cálculo es necesario
emplear las ecuaciones de equilibrio
que se utilizaron antes para
describir Ia estática dela partícula
en el plano:
- Solo que aquí Ia ecuación también
incluye los giros. Por tanto, queda:
- Solo que aquí Ia ecuación también
incluye los giros. Por tanto, queda:
- Para su cálculo es necesario
emplear las ecuaciones de equilibrio
que se utilizaron antes para
describir Ia estática dela partícula
en el plano:
- Dos sistemas de tuerza que
actúan sobre el mismo cuerpo
rígido son equivalentes si
producen el mismo efecto sobre
el mismo punto:
- 8. Equilibrio de un
cuerpo rígido en el
plano
- Las ecuaciones que
definen si un cuerpo
rígido se encuentra en
equilibrio en el plano
son:
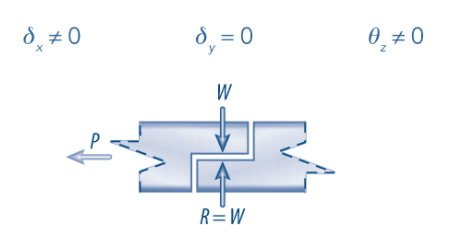
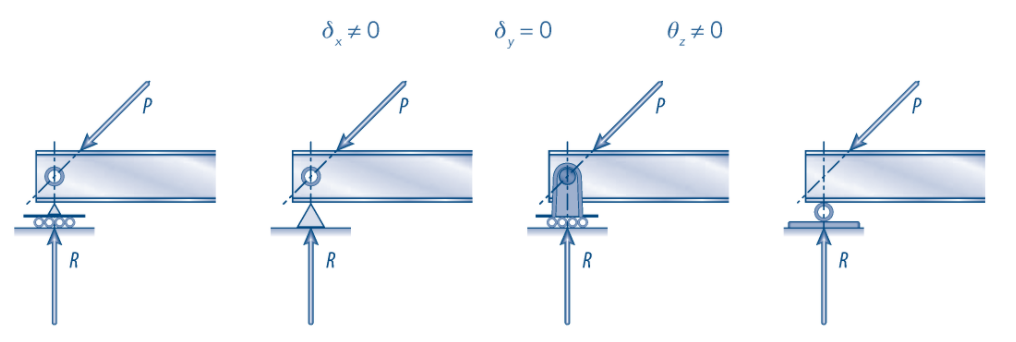
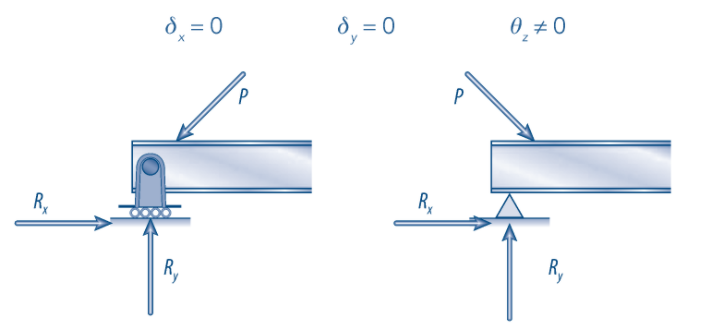
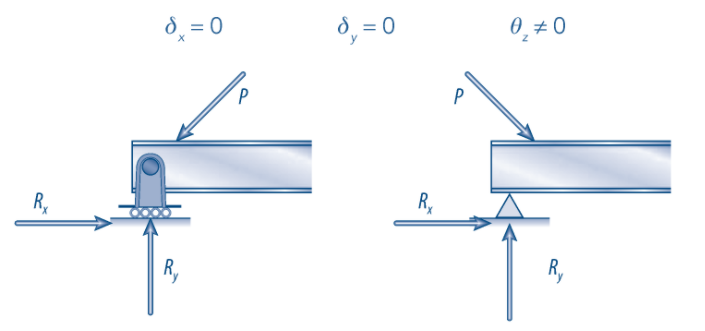
- Los tipos de apoyos
que se utilizan en el
plano son:
- Apoyo directo
- Apoyo libre
- Articulacion
- Empotramiento
- Apoyo directo
- Los tipos de apoyos
que se utilizan en el
plano son:
- Las ecuaciones que
definen si un cuerpo
rígido se encuentra en
equilibrio en el plano
son:
- 9. Equilibrio de un cuerpo
rígido en el espacio
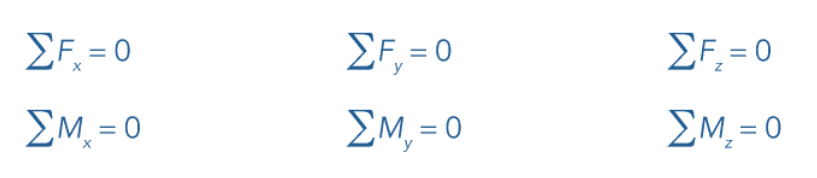
- Las ecuaciones que
definen si un cuerpo
rígido se encuentra
en equilibrio en el
espacio son:
- En este caso, Ias primeras tres
ecuaciones se refieren a|
desplazamiento del cuerpo rígido en
X, Y y Z, mientras que Ias restantes
tres ecuaciones se refieren a los
giros alrededor de los ejes X, Y y Z.
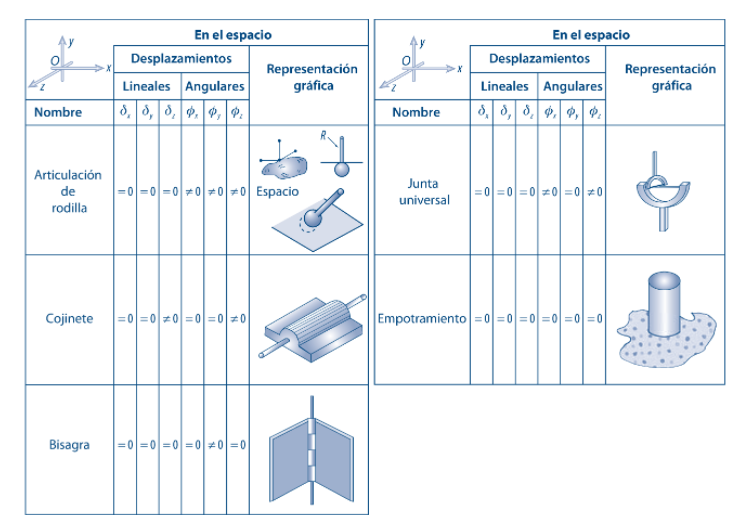
Los tipos de apoyos que se pueden
utilizar en el espacio son:
- En este caso, Ias primeras tres
ecuaciones se refieren a|
desplazamiento del cuerpo rígido en
X, Y y Z, mientras que Ias restantes
tres ecuaciones se refieren a los
giros alrededor de los ejes X, Y y Z.
Los tipos de apoyos que se pueden
utilizar en el espacio son:
- Las ecuaciones que
definen si un cuerpo
rígido se encuentra
en equilibrio en el
espacio son:
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.