35772742
Description
Mind Map by Rebbecca Stanley, updated more than 1 year ago
|
|
Created by Rebbecca Stanley
almost 4 years ago
|
|
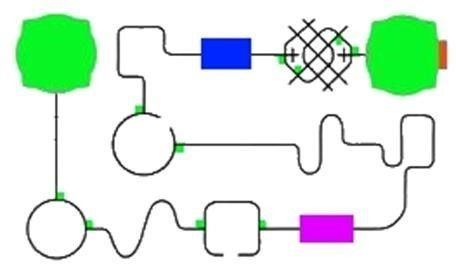
RoboCup Challenge:
Assessment
- Analyse problem
- Context
- SpaceX -
human colony
on Mars
- Autonomous
robots - data
collection, support
colonisation effort
- Path to follow, but
some obstacles
- Move obstacles off
path or navigate
around
- Move obstacles off
path or navigate
around
- Optional light and sound
display once completed
- 4 weeks, no
delays
- SpaceX -
human colony
on Mars
- Analysis
- Need to use line follow code,
immovable object code and
movable object code
- Must navigate from one green
point to the other
- Need to be able to identify objects and
decide how to handle them to continue
on path
- "As quickly as possible": might have to
decrease accuracy to achieve speed
- "A pathway for the robots to follow":
only one line to follow, until
criss-cross intersection
- Note: movable and immovable boxes
don't change position on map
- Note: movable and immovable boxes
don't change position on map
- Need to use line follow code,
immovable object code and
movable object code
- Context
- Ideas
- Follow the path
- Intersections
- Use the green boxes to turn right whenever
detected, then resume line follow. This is so the
robot doesn't change direction if it misses the line
- Use the green boxes to turn right whenever
detected, then resume line follow. This is so the
robot doesn't change direction if it misses the line
- Corners
- Rotate one wheel forward to
turn until black line is spotted
- May be too far away from line and keep spinning and not
see anything, or accidentally spin too far and see black
line and travel in opposite direction
- Easiest to turn corners, but only
one way depending on spin
direction
- SAMPLE CODE
- May be too far away from line and keep spinning and not
see anything, or accidentally spin too far and see black
line and travel in opposite direction
- Rotate one wheel forward and one
back at same time
- More distinctive turn, possibly more accurate
- SAMPLE CODE
- Could accidentally move to wrong side of line due to
excessive turning and then go in wrong direction
- More distinctive turn, possibly more accurate
- Rotate one wheel forward to
turn until black line is spotted
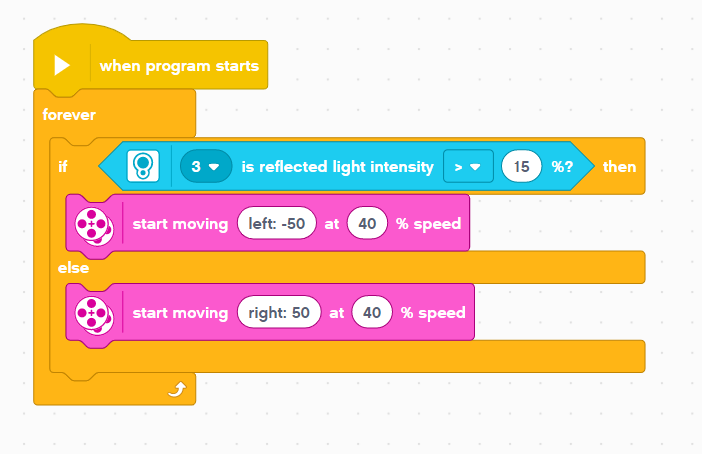
- Black line
- Swerving line-follow
- Start on right side, turn left till see
black, turn right again until see
floor
- Need to identify PSI values for
black line and floor
- Turn one motor (wheel) at
a time to move forward
progressively, or could
rotate one wheel forward
and the other back at
same to for more defined
turn
- However, may not deal
with intersections or
corners well if the robot
misses the line and flips
directions
- Possibly most efficient and
fastest method, achieving
criteria
- Need to identify PSI values for
black line and floor
- SAMPLE CODE
- Start on right side, turn left till see
black, turn right again until see
floor
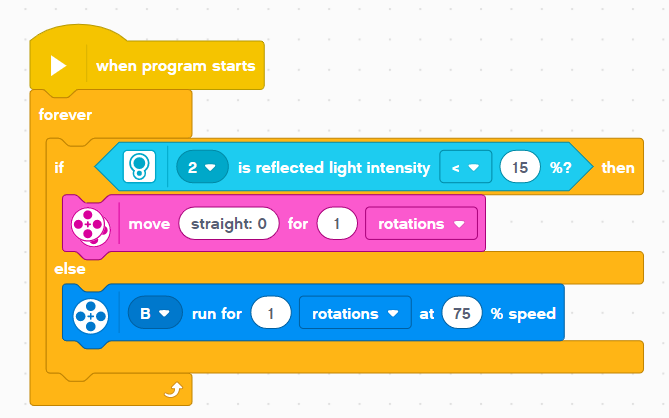
- Move forward on black line
- Start with robot on black line, if it sees
black, move forward until it doesn't
see black, then rotate both directions
until sees black again
- Need to identify PSI values for
black line and floor
- For rotational black line check, would
turn only one wheel to sweep and
not jump over black line by accident.
For moving forward, just rotate both
wheels
- Most accurate method, but really slow, higher chance of
accomplishing intersections and corners, though could get
stuck on really tight corners trying to find the black line
- Need to identify PSI values for
black line and floor
- SAMPLE CODE
- Start with robot on black line, if it sees
black, move forward until it doesn't
see black, then rotate both directions
until sees black again
- Swerving line-follow
- Intersections
- Avoid obstacles
- Movable
- Move forward into block and keep going until it moves
- Might be inefficient if it doesn't
get out of the way
- Might be inefficient if it doesn't
get out of the way
- Detect movable block (if it's the large one) and turn out to the
side push it out of path the continue line following
- Move forward into block and keep going until it moves
- Immovable
- Reverse backwards, turn slightly and aim for box again to see if it
misses, used ultrasonic sensor to navigate around box
- Could only half clear the box, miss and get stuck.
Besides, ultrasonic sensor is on the front and
won't be able to detect box on side
- Could only half clear the box, miss and get stuck.
Besides, ultrasonic sensor is on the front and
won't be able to detect box on side
- Reverse backwards, turn, move forward, and navigate around block using
precise measurements
- If the box
measurements
change, the code
doesn'work
- If the box
measurements
change, the code
doesn'work
- Reverse backwards, turn slightly and aim for box again to see if it
misses, used ultrasonic sensor to navigate around box
- Movable
- Follow the path
- Robot Sensors
- Ultrasonic
- Determines robot's distance away
from obstacle
- Senses closest distance reading,
gives value in centimetres. Used in
navigating around spaces.
- The sensor sends out a frequency wave that's above human
hearing. The wave is reflected back when it hits the target.
The distance is measured by time between emission and
reception.
- The sensor sends out a frequency wave that's above human
hearing. The wave is reflected back when it hits the target.
The distance is measured by time between emission and
reception.
- Determines robot's distance away
from obstacle
- Colour/light
- Determines colour
values by sensing
reflection of light
- Determines PCT, which can be used to change
robot actions. Used in line-follow.
- A PCT value in terms of EV3 robotics and
programming means percent (%), as in value
out of 100. To obtain a PCT value, the
sensor emits light from a transmitter
and detects the value of the light that is
reflected back at the receiver.
- A PCT value in terms of EV3 robotics and
programming means percent (%), as in value
out of 100. To obtain a PCT value, the
sensor emits light from a transmitter
and detects the value of the light that is
reflected back at the receiver.
- Determines colour
values by sensing
reflection of light
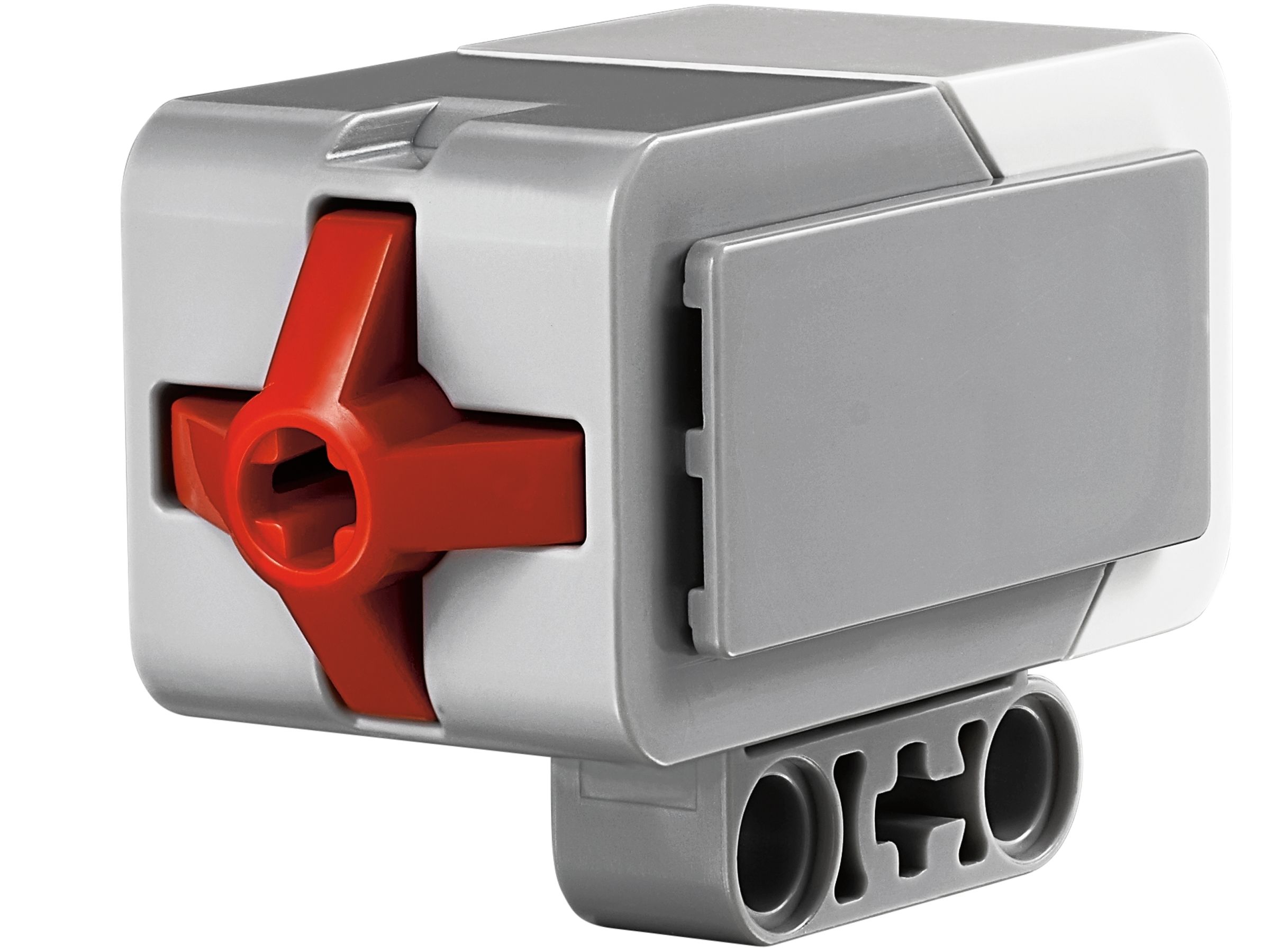
- Touch
- Determines whether the robot has hit an
obstacle or not. Used in obstacle moving.
- The button on the sensor is either depressed, giving a
value of 1, or not depressed, giving a value of 0.
These values can be used as variables to adapt code
- The touch sensor works like an electrical
switch. When there's contact, it opens the
circuit and allows electrical current flow.
- The touch sensor works like an electrical
switch. When there's contact, it opens the
circuit and allows electrical current flow.
- Determines whether the robot has hit an
obstacle or not. Used in obstacle moving.
- Ultrasonic
- Available Resources
- eLearn
- Information
about robot and
assessment
- Learn how to make algorithms, flowcharts and pseudocode
- Learn how to code and build robots
- Learn how to make algorithms, flowcharts and pseudocode
- Information
about robot and
assessment
- Microsoft Tools
- Microsoft Word
- Writing assessment and
analysing data
- Writing assessment and
analysing data
- Microsoft Word
- EV3
- Programming software
- Used to code robot to complete challenge
- Used to code robot to complete challenge
- Website
- Used to find correct robot build and
learn how to use software
- Used to find correct robot build and
learn how to use software
- Programming software
- eLearn
- Non-functional requirements
- Things that aren't necessary to
completing the code, like aesthetics
- Self-determine criteria:
celebratory dance
- Visual and sound: light and screen display
with robot turning and moving in dance
- Visual and sound: light and screen display
with robot turning and moving in dance
- Self-determine criteria:
celebratory dance
- Things that aren't necessary to
completing the code, like aesthetics
- Functional Requirements
- Robot travels around map
- Use specific functions to
decide how to move around
- Line-follow
- Right turn
- Left turn
- Line-follow
- Use specific functions to
decide how to move around
- Robot is able to determine
best solution for obstacles
and complete solution
- Movable
- Push box out of the
way and resume path
- Push box out of the
way and resume path
- Immovable
- Run into box then navigate around it
- Run into box then navigate around it
- Movable
- Robot travels around map
- Constraints/limitations
- The map
- The map route
doesn't change
- Can't make an easier
way to reach boxes
and follow the line
- Can't make an easier
way to reach boxes
and follow the line
- The map route
doesn't change
- Robot build
- The colour sensor is
permanently on one
side of robot
- May be inefficient to constantly
have to change line-follow
code, given the direction the
robot turns to reach line
- May be inefficient to constantly
have to change line-follow
code, given the direction the
robot turns to reach line
- The colour sensor is
permanently on one
side of robot
- Time
- 3 hours
maximum of
coding time
per week
- Have to only use class time,
due to lack of resources,
can't work on robot code
from home
- Have to only use class time,
due to lack of resources,
can't work on robot code
from home
- 3 hours
maximum of
coding time
per week
- The map
- Prescribed Criteria
- This is the criteria listed in the
task sheet
- Follow the path
- Use colour sensors to navigate around the map:
forward, left and right
- Use colour sensors to navigate around the map:
forward, left and right
- Detect and navigate
around immovable objects
- Determine what an immovable object is using touch and
ultrasonic sensors, then work out how to move around
them and resume on the path
- Determine what an immovable object is using touch and
ultrasonic sensors, then work out how to move around
them and resume on the path
- Detect and clear the movable objects
from the path
- Determine the movable object with touch and ultrasonic sensors then work
out how to move around them and push them off the path efficient before
resuming line-follow code
- Determine the movable object with touch and ultrasonic sensors then work
out how to move around them and push them off the path efficient before
resuming line-follow code
- Follow the path
- This is the criteria listed in the
task sheet
- Self-determined criteria
- Celebratory Dance
once the robot has
finished moving the
movable box
- Visual
- Robot display a face on screen, arm motor
move up and down, spin in circles, rotate
each wheel forward and back twice
- Robot display a face on screen, arm motor
move up and down, spin in circles, rotate
each wheel forward and back twice
- Sound
- play a tune using sound blocks,
have the robot play one of the
pre-created audio tracks
- play a tune using sound blocks,
have the robot play one of the
pre-created audio tracks
- Visual
- Celebratory Dance
once the robot has
finished moving the
movable box
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.