4728885
Descrição
FlashCards por pelsin pelsin, atualizado more than 1 year ago
|
|
Criado por pelsin pelsin
quase 9 anos atrás
|
|
| Questão | Responda |
| 1. Welche charakteristischen Merkmale unterscheiden eine SPS von der konventionellen Datenverarbeitung? | Konventionelle Datenverarbeitung: -Datenorientierte Programmbearbeitung -Zur Programmierung werden Standard sprachen eingesetzt -Prinzipiell wird das Programm nach dem Start einmalig durchlaufen SPS: -E/A-orientierte Programmbearbeitung -Zur SPS-Programmierung werden spezielle SPS-Sprachen - Die Programmbearbeitung erfolgt in Echtzeit, zyklisch oder ereignisorientiert |
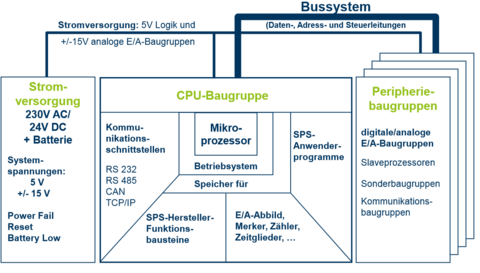
| 2. Skizzieren Sie die Hardware-Struktur eines modularen SPS-Systems. Nennen Sie wesentliche Bestandteile/Funktionen der Komponenten | |
| 3. Wodurch unterscheiden sich Heiß-, Warm-und Kaltstart? | Kaltstart: Alle dynamischen Daten (Variablen, E/A-Abbild zugehörige Programmteile werden auf einen vorbestimmten Initialwert zurückgesetzt. |
| 3. Warmstart | Warmstart Start mit vom SPS-Programm im Speicher abgelegten dynamischen Daten und einem im System festgelegten Zustand des Anwenderprogramms |
| 3. Heißstart | Heißstart Wiederanlauf nach einem Netzausfall innerhalb der prozessabhängigen maximal zulässigen Zeit, die dem SPS-System zugestanden wird, um den Zustand vor dem Netzausfall wieder einzunehmen. |
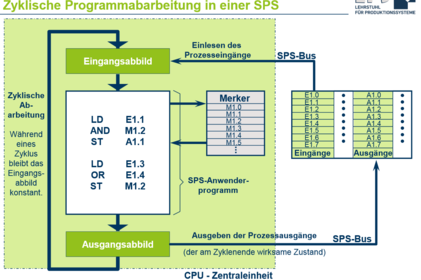
| 4. Erläutern Sie das zyklische Programmabarbeitungsprinzip einer SPS-Steuereinheit anhand einer Skizze. | |
| 5. Welche drei Möglichkeiten der zeitlichen SPS-Programmausführung können unterschieden werden? | 1. Ereignisorientierte Bearbeitung 2. Zyklische Bearbeitung in festem Zeitraster 3. Dauerbearbeitung |
| 6. Welche Anforderungen hat die ideale SPS zu erfüllen? | aufwenig |
| 7. Wie ist Echtzeitfähigkeit definiert? | Bearbeitung, bei der das Programm synchron zum Prozes läuft. Garantierte Rechzeitige Reaktion |
| 8. Welche Anforderungen werden an ein Echtzeit-Betriebssystem gestellt? | -(Rechtzeitigkeit), (Latenzzeit) -Einhaltung der „Deadline“ -Verwaltung zyklisch wiederkehrender Aufgaben -Hohe Zuverlässigkeit |
| 9. Erläutern Sie die Begriffe Task, Task-Latenzzeit, Preemptive Scheduling, Context Switching und Semaphore in Bezug auf Echtzeitbetriebssysteme | Task In einem Echtzeitbetriebssystem definieren zyklisch aktivierte und ereignisaktivierte Tasks das Zeitverhalten des Systems. In einer Task werden Programme instanziiert und ausgeführt. |
| 9. Task-Latenzeit | Zeitspanne vom Eingang der Startanforderung für eine Task bis zum Übergang in den Zustand “Ausführung |
| 9. Preemptive Scheduling | Prioritätsgesteuertes Zuteilen der CPU zu den Tasks mit Unterbrechung laufender Tasks |
| 9. Context Switching | Kontextumschaltung; Wechsel von einer Task zur nächsten |
| 9. Semaphore | Flag zur Synchronisation von Zugriffen auf gemeinsame Ressourcen (aus dem griechischen Wort Signal). |
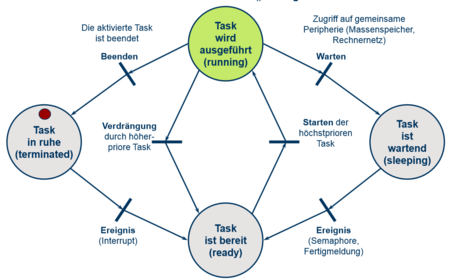
| 11. Skizzieren Sie den Zustandsgraph einer Task als Petri-Netz. | |
| 12. Erläutern Sie die Begriffe Abtastzeit, Programmlaufzeit und Antwortzeit. | Abtastzeit (Zykluszeit) Die Zeit, die zwischen zwei aufeinanderfolgenden Aktivierungen desselben Anwenderprogramms verstreicht |
| 12. Programmlaufzeit | Programmlaufzeit Die Zeit, die die SPS-CPU (Zentraleinheit) für die Ausführung des SPS-Anwendungsprogramms in der betrachteten Task benötigt |
| 12.Erläutern Antwortzeit | Antwortzeit (Reaktionszeit) Die Antwortzeit ist die Zeit, die vergeht, bis nach einer Eingangsänderung eine Ausgangsänderung erfolgt...... |
| 13. Wie berechnet sich die Reaktionszeit einer SPS von der Änderung des Signals am Sensor bis zur Änderung des Aktors? | Reaktionszeit = Eingangsverzögerung (z.B. 10 ms) + 2 * Abtastzeit + Ausgangsverzögerung |
| 14. Nennen Sie wesentliche Aufbauformen von SPS-Steuerungen | Zentrale, modulare Steuerung (z.B. Kompaktsteuerung, Vernetzte Kompaktsteuerung Klemmensteuerung) |
{kind=link}
{kind=link}
{kind=link}
Quer criar seus próprios Flashcards gratuitos com GoConqr? Saiba mais.