10524749
Descrição
Mapa Mental por luis fernando Martinez, atualizado more than 1 year ago
|
|
Criado por luis fernando Martinez
mais de 7 anos atrás
|
|
Microcontroladores
- VON NEUMANN
- La arquitectura de Von Neumann es caracterizada por los procesadores que poseen el mismo
dispositivo de almacenamiento en donde coexisten tanto datos como instrucciones, Las instrucciones
y los datos son almacenados en el mismo formato dentro de la misma memoria, lo que quiere decir
que las instrucciones son datos y comparten el mismo bus de datos en su transmisión.
- La arquitectura de Von Neumann es caracterizada por los procesadores que poseen el mismo
dispositivo de almacenamiento en donde coexisten tanto datos como instrucciones, Las instrucciones
y los datos son almacenados en el mismo formato dentro de la misma memoria, lo que quiere decir
que las instrucciones son datos y comparten el mismo bus de datos en su transmisión.
- HARVARD
- En la arquitectura Harvard los procesadores utilizan dispositivos de almacenamiento
físicamente separados para el manejo de instrucciones y datos. El acceso a cada espacio de memoria
puede llegar a ser mediante buses distintos, es decir, existe unbus de datos y un bus de
instrucciones
- En la arquitectura Harvard los procesadores utilizan dispositivos de almacenamiento
físicamente separados para el manejo de instrucciones y datos. El acceso a cada espacio de memoria
puede llegar a ser mediante buses distintos, es decir, existe unbus de datos y un bus de
instrucciones
- COMPONENTES
- • Procesador o UCP (Unidad Central de Proceso). • Memoria RAM para Contener los datos. • Memoria
para el programa tipo ROM/PROM/EPROM. • Líneas de E/S para comunicarse con el exterior. • Diversos
módulos para el control de periféricos (temporizadores, Puertas Serie y Paralelo, CAD: Conversores
Analógico/Digital, CDA: Conversores Digital/Analógico, etc.). • Generador de impulsos de reloj que
sincronizan el funcionamiento de todo el sistema.
- • Procesador o UCP (Unidad Central de Proceso). • Memoria RAM para Contener los datos. • Memoria
para el programa tipo ROM/PROM/EPROM. • Líneas de E/S para comunicarse con el exterior. • Diversos
módulos para el control de periféricos (temporizadores, Puertas Serie y Paralelo, CAD: Conversores
Analógico/Digital, CDA: Conversores Digital/Analógico, etc.). • Generador de impulsos de reloj que
sincronizan el funcionamiento de todo el sistema.
- familias Microchip
- 8 bit
- familia 10
- familia 16
- familia 18:
Mejor velocidad
de
procesamiento
y perifericoes
integradoss
- PIC
18F4550.
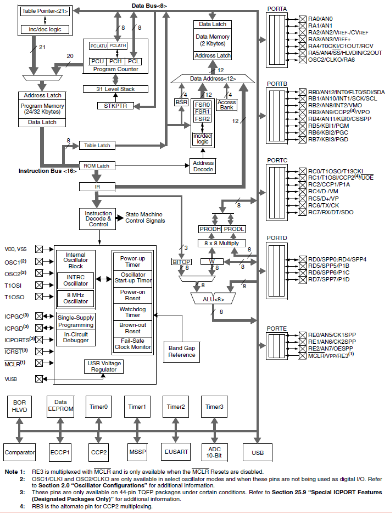
- Tiene arquitectura
tipo Harvard como son
separados los buses
de datos tiene mayor
velocidad de
procesamiento, pero
require mas hardware
- Tiene un bus para instrucciones
- Tiene un bus de datos
- Tiene un bus para instrucciones
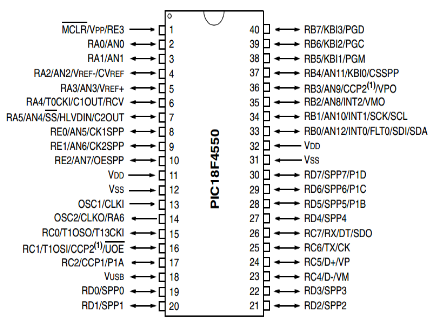
- Tiene 5 puertos
- Puerto A
- 7 lineas de E/S
- 7 lineas de E/S
- Puerto B
- 8 lineas de E/S
- 8 lineas de E/S
- Puerdo C
- 6 lineas de E/S + 2 de entrada
- 6 lineas de E/S + 2 de entrada
- Puerto D
- 8 lineas de E/S
- 8 lineas de E/S
- Puerto E
- 3 lineas de E/S + 1 de Entrada
- 3 lineas de E/S + 1 de Entrada
- Registro de un puerto E/S
- TRIS para configurar como
entradas (1) o salidas(0) los
puertos
- PORT lee el valor
de Pin de E/S y
establece el valor
de latch de salida
- LAT lee o
establece el
valor de latch
de salida
- TRIS para configurar como
entradas (1) o salidas(0) los
puertos
- Puerto A
- Perifericos Embebidos
- Comparadores
- Contadores
- Timers (temporizadores ) son 4
- convertidores analogicos digitales
varios pines para esto pero
internamente solo se tiene un
convertidor
- modulo de
comunicacion serial
(EUSAT) Se utiliza para
comunicarse con otros
microcotroladores
- modulo usb para comunicacion
- Comparadores
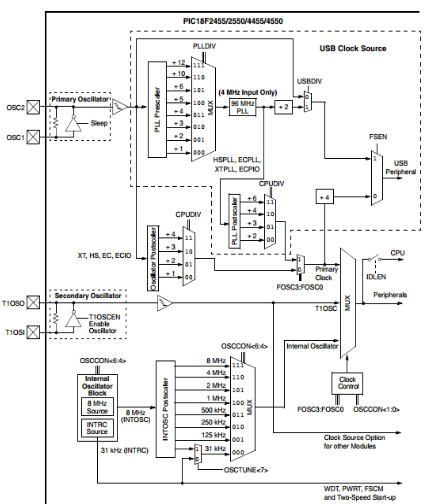
- Configuracion del Reloj
- Tiene un Oscilador
interno pero
permite que se
pueda usar un
externo (es mas
estable el externo)
- se recomienda
utilizar lenguajes de
alto nivel como C en
lugar de lenguaje
ensamblador
- Proceso de Configiuracion del Reloj
- primero pasa a un Pre-escalador (1,2,3,4,5,6,10,12)
- Luego pasa al PLL una señal de 4 MHz
- la señal es procesada por un Post-escalador (2,3,4,6)
- Final mente se obtiene la señal primaria del oscilador.
- Final mente se obtiene la señal primaria del oscilador.
- la señal es procesada por un Post-escalador (2,3,4,6)
- Luego pasa al PLL una señal de 4 MHz
- primero pasa a un Pre-escalador (1,2,3,4,5,6,10,12)
- se recomienda
utilizar lenguajes de
alto nivel como C en
lugar de lenguaje
ensamblador
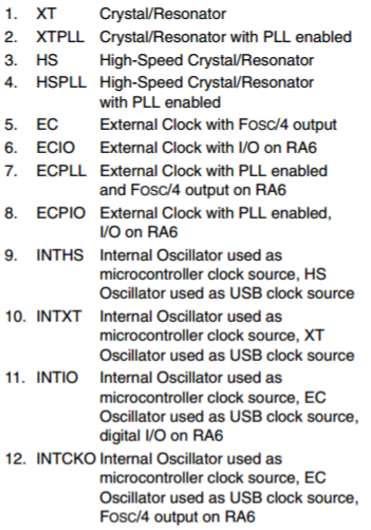
- tiene 12 modos diferentes
- Tiene un Oscilador
interno pero
permite que se
pueda usar un
externo (es mas
estable el externo)
- Pines
- Tiene arquitectura
tipo Harvard como son
separados los buses
de datos tiene mayor
velocidad de
procesamiento, pero
require mas hardware
- PIC
18F4550.
- familia 10
- 16 bit
- 32 bit
- 8 bit
Anexos de mídia
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Quer criar seus próprios Mapas Mentais gratuitos com a GoConqr? Saiba mais.