17741359
Descrição

Mapa Mental por INGRID BARBOSA ROCHA, atualizado more than 1 year ago
|
|
Criado por INGRID BARBOSA ROCHA
mais de 5 anos atrás
|
|
QUE SON LOS PLANOS R3
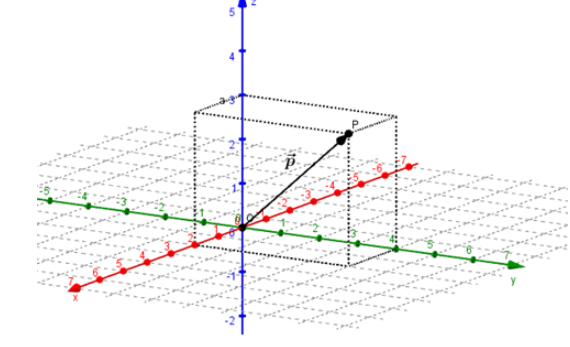
- Queda establecido un sistema de coordenadas donde
todo punto de R 3 se define mediante una terna
ordenada de números reales: P ( x , y , z ) , y tiene
asociado un vector posición ⃗ p = −−→ O P = ( x , y , z ) .
Para dar un ejemplo en el siguiente esquema
graficamos al punto P ( 2 , 4 , 3 ) , y su vector posición ⃗
p = −−→ O P : Hemos tomado la misma escala sobre
cada uno de los ejes. Pero, como en R 2 , es posible
tomar una escala diferente para cada eje. En el
siguiente GIF les mostramos cómo podría hacerse la
gráfica del punto paso a paso
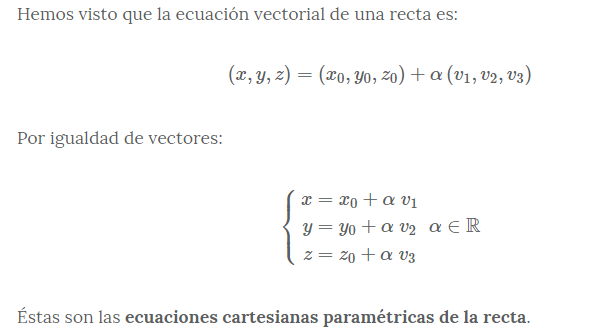
- ECUACIONES
- VECTORIALES
- PARAMETRICA
- SIMETRICA
- VECTORIALES
- Hallar la ecuación del plano perpendicular al vector ⃗ n = ( 3
, 2 , 1 ) que pasa por el punto P 0 ( 1 , 1 , – 1 ) . Las
componentes de ⃗ n nos indican los coeficientes a , b y c de
la ecuación del plano: π : 3 x + 2 y + z + d = 0 ¿Cómo
hallamos d ? El punto debe verificar la ecuación, entonces
reemplazamos P 0 y obtenemos el coeficiente que faltaba:
3.1 + 2.1 – 1 + d = 0 ⇒ d = – 4 Así obtenemos la ecuación del
plano: π : 3 x + 2 y + z – 4 = 0 Éste es el único plano que
pasa por el punto P 0 y es perpendicular al vector ⃗ n . Para
efectuar un gráfico aproximado del plano que obtuvimos,
podemos buscar sus intersecciones con los ejes
coordenados:
Anexos de mídia
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Quer criar seus próprios Mapas Mentais gratuitos com a GoConqr? Saiba mais.