26027898
Descrição
Mapa Mental por JOSIMAR MUNOZ DELGADO, atualizado more than 1 year ago
|
|
Criado por JOSIMAR MUNOZ DELGADO
mais de 4 anos atrás
|
|
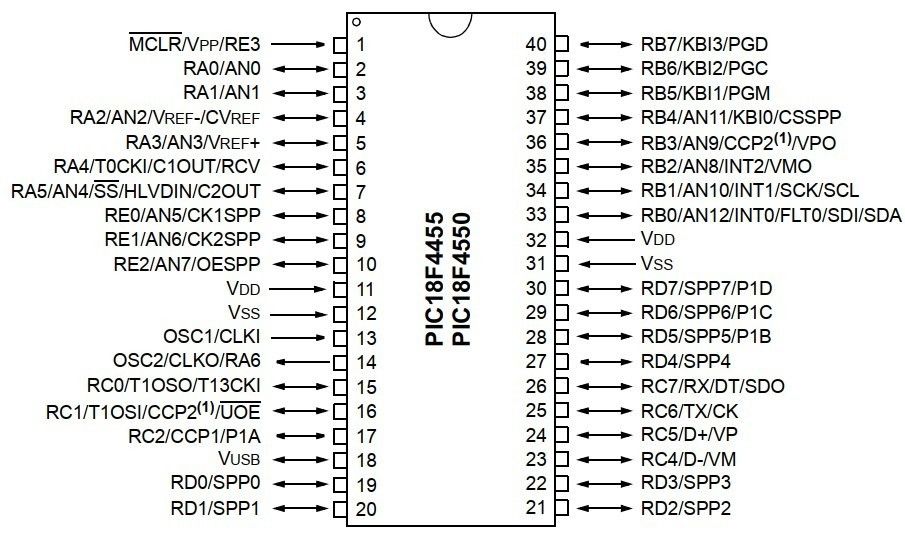
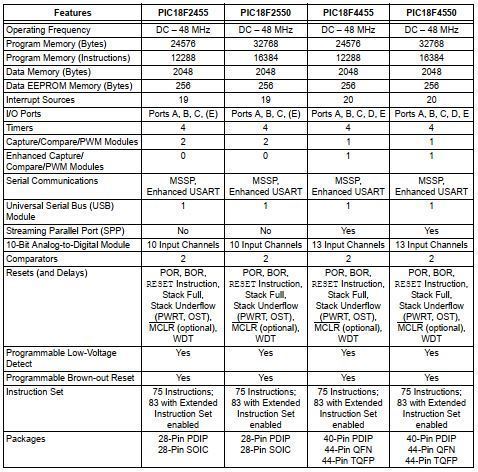
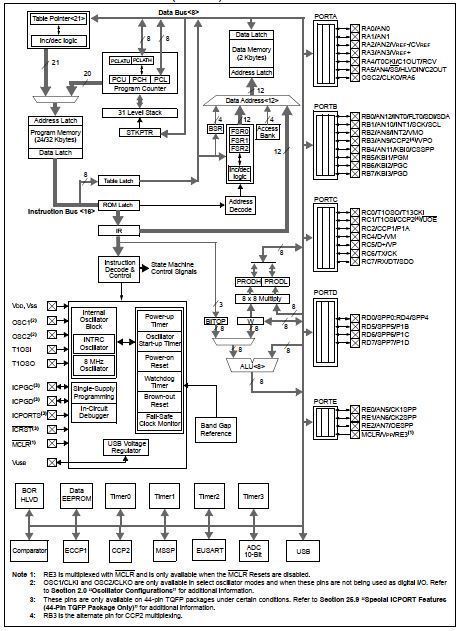
PIC18F4550
- Sus
elementos
son
- Unidades de memoria
- Compuesta por
- RAM
- Con capacidad
de 2048 Bytes
- Con 160 Bytes
dedicados a los
registros de función
especial
- Con 160 Bytes
dedicados a los
registros de función
especial
- Con capacidad
de 2048 Bytes
- EEPROM
- De datos
con 256
Bytes
- Puede ser
borrada y
escrita hasta
1,000,000 de
veces
- De datos
con 256
Bytes
- Memoria
de
programa
- Con 32Kb
- Capacidad
para
16,384
instrucciones
- En esta
familia de
los PIC18 se
agregaron 8
nuevas
instrucciones
- En esta
familia de
los PIC18 se
agregaron 8
nuevas
instrucciones
- Esta puede ser
borrada y
escrita hasta
100,000 veces
- Con 32Kb
- RAM
- Compuesta por
- CPU
- Es el circuito integrado
capaz de realizar las
funciones de traer las
instrucciones del
programa desde la
memoria, interpretarlas
y hacer que se ejecuten
- Constituido
por
- Unidad de
control
- ALU
- Unidad de
control
- Es el circuito integrado
capaz de realizar las
funciones de traer las
instrucciones del
programa desde la
memoria, interpretarlas
y hacer que se ejecuten
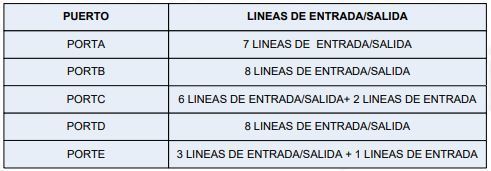
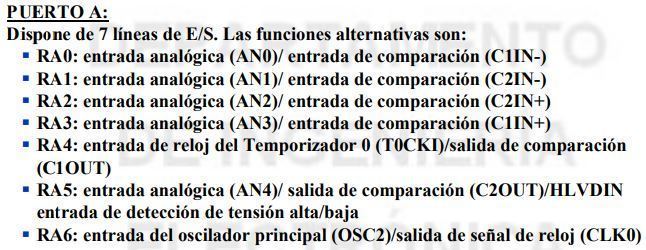
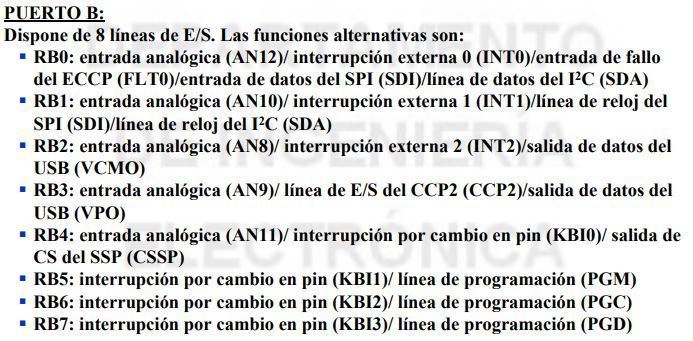
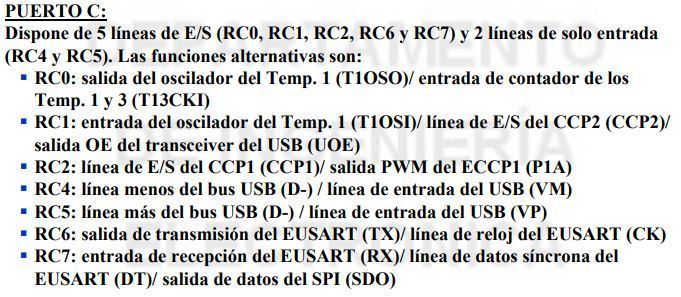
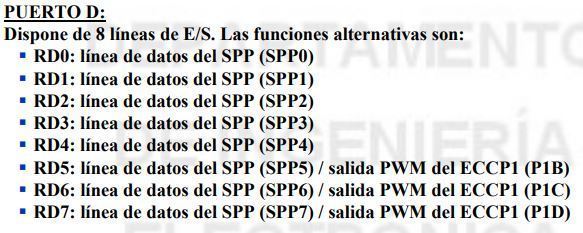
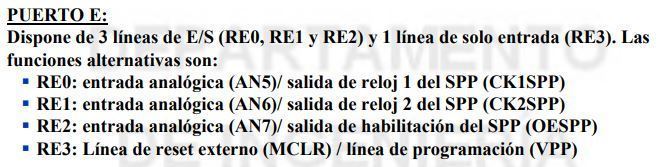
- Puertos I/O
- 35 Pines configurables como
I/O Divididos entre 5 puertos
- Ademas de ser
configurables como
entradas y salidas digitales
tienen otras funciones
como lo son:
- Ademas de ser
configurables como
entradas y salidas digitales
tienen otras funciones
como lo son:
- Cada puerto tiene tres
registros para su
funcionamiento. Estas los
registros son:
- • Registro TRIS (registro
de dirección de datos)
- • Registro PORT (lee
los niveles en los
pines del
dispositivo)
- • Registro LAT
- • Registro TRIS (registro
de dirección de datos)
- 35 Pines configurables como
I/O Divididos entre 5 puertos
- BUS
- Dividido
en
- Bus de direcciones
- Bus de datos
- Bus de control
- Bus de direcciones
- Dividido
en
- Perifericos
- USB
- Es un bus serie que permite
la conexión de diversos
dispositivos en cadena
permitiendo la transferencia
síncrona y asíncrona entre
estos
- Es un bus serie que permite
la conexión de diversos
dispositivos en cadena
permitiendo la transferencia
síncrona y asíncrona entre
estos
- Convertidor A/D
- El conversor analógico/digital (A/D) se emplea para
convertir una señal analógica (por ejemplo, la tensión)
a un formato digital, de manera que pueda leerse por
el microcontrolador. Algunos microcontroladores
tienen conversores A/D integrados. También se puede
conectar un conversor A/D externo a cualquier
microcontrolador. Típicamente, los conversores A/D
son de 8 bits, por lo que disponen de 256 niveles de
cuantificación. Algunos microcontroladores tienen
conversores A/D de 10 bits con 1024 niveles de
cuantificación
- El conversor analógico/digital (A/D) se emplea para
convertir una señal analógica (por ejemplo, la tensión)
a un formato digital, de manera que pueda leerse por
el microcontrolador. Algunos microcontroladores
tienen conversores A/D integrados. También se puede
conectar un conversor A/D externo a cualquier
microcontrolador. Típicamente, los conversores A/D
son de 8 bits, por lo que disponen de 256 niveles de
cuantificación. Algunos microcontroladores tienen
conversores A/D de 10 bits con 1024 niveles de
cuantificación
- Comunicación serial
- La comunicación serie (también denominada
comunicación RS232) permite conectar un
microcontrolador a otro microcontrolador, o a un PC,
usando un cable serie. Algunos microcontroladores
integran un hardware llamado transmisor/receptor
sincrónico/asincrónico universal (USART,
Synchronous-Asynchronous Receiver-Transmitter
Universal) para realizar la interfaz de comunicación
serie
- La comunicación serie (también denominada
comunicación RS232) permite conectar un
microcontrolador a otro microcontrolador, o a un PC,
usando un cable serie. Algunos microcontroladores
integran un hardware llamado transmisor/receptor
sincrónico/asincrónico universal (USART,
Synchronous-Asynchronous Receiver-Transmitter
Universal) para realizar la interfaz de comunicación
serie
- Comparador
- Los comparadores
analógicos se emplean
cuando se necesita
comparar dos tensiones
analógicas
- Los comparadores
analógicos se emplean
cuando se necesita
comparar dos tensiones
analógicas
- Módulos
Captura/Compare/PWM.
- • Modo captura: una pareja de
registros de un módulo CCPx captura
el valor que tiene el TMR1 cuando
ocurre un evento especial en la patita
RC2/CCP1 (para el módulo CCP1) o en
la RC1/T1OSI/CCP2 (para el módulo
CCP2).
- • Modo comparación: se compara el valor
de 16 bits del TMR1 con otro valor
cargado en una pare- ja de registros de un
módulo CCPx y cuando coinciden se
produce un evento en la/s patita/s
RC2/CCP1 y/o RC1/T1OSI/CCP2.
- •Modo modulación de anchura de
pulsos (PWM): dentro del intervalo
del período de un impulso controla
la anchura en que la señal vale
nivel alto
- • Modo captura: una pareja de
registros de un módulo CCPx captura
el valor que tiene el TMR1 cuando
ocurre un evento especial en la patita
RC2/CCP1 (para el módulo CCP1) o en
la RC1/T1OSI/CCP2 (para el módulo
CCP2).
- Temporizadores
- Es básicamente un contador que se activa con una
señal de reloj interna o externa al microcontrolador.
El temporizador puede ser de 8 bits o de 16 bits. Por
pro- grama, se puede cargar el valor de conteo del
temporizador, así como arrancar y detener al
mismo. La mayoría de los temporizadores pueden
configurarse para generar una interrupción cuando
se alcance un cierto número en el conteo
(usualmente cuando se desbordan)
- Es básicamente un contador que se activa con una
señal de reloj interna o externa al microcontrolador.
El temporizador puede ser de 8 bits o de 16 bits. Por
pro- grama, se puede cargar el valor de conteo del
temporizador, así como arrancar y detener al
mismo. La mayoría de los temporizadores pueden
configurarse para generar una interrupción cuando
se alcance un cierto número en el conteo
(usualmente cuando se desbordan)
- Interrupciones
- La interrupción permite que el
microcontrolador responda rápidamente a
eventos externos e internos (por ejemplo, un
temporizador). Cuando ocurre una
interrupción el microcontrolador sale del flujo
normal de ejecución de su programa y salta a
una parte especial del programa, conocida
como la Interrupt Service Routine (ISR) o rutina
de atención a la interrupción. Así, se ejecuta el
código del programa dentro de la ISR y tras el
retorno de la ISR, el programa reanuda su flujo
normal de ejecución
- La interrupción permite que el
microcontrolador responda rápidamente a
eventos externos e internos (por ejemplo, un
temporizador). Cuando ocurre una
interrupción el microcontrolador sale del flujo
normal de ejecución de su programa y salta a
una parte especial del programa, conocida
como la Interrupt Service Routine (ISR) o rutina
de atención a la interrupción. Así, se ejecuta el
código del programa dentro de la ISR y tras el
retorno de la ISR, el programa reanuda su flujo
normal de ejecución
- USB
- Unidades de memoria
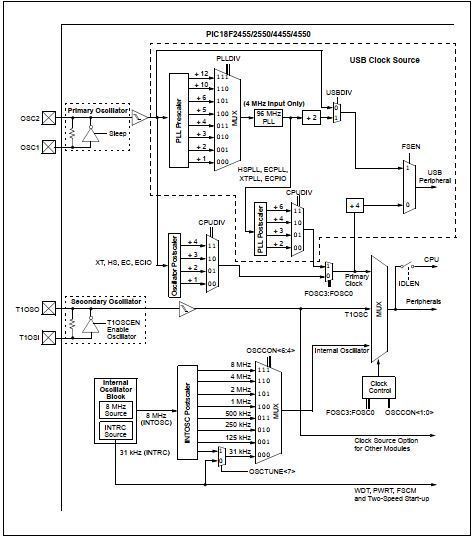
- Sus modos de osciladores son:
- XT: XTAL/ circuito resonante.
- XTPLL: XTAL/ circuito resonante con PLL activo.
- HS: XTAL/ circuito resonante muy rápido.
- HSPLL: XTAL/ circuito resonante muy rápido con PLL activo.
- EC: Reloj externo con Fosc/4 como salida en RA6.
- ECIO: Reloj externo con RA6 como E/S.
- ECPLL: Reloj externo con Fosc/4 como salida en RA6 y PLL activo.
- ECPIO: Reloj externo con RA6 como E/S y PLL activo.
- INTHS: Oscilador interno usado como reloj del microcontrolador y HS como reloj del USB.
- INTXT: Oscilador interno usado como reloj del microcontrolador y XT como reloj del USB.
- INTXT: Oscilador interno usado como reloj del microcontrolador y XT como reloj del USB.
- INTIO: Oscilador interno usado como reloj del microcontrolador y EC como reloj del USB con RA6 como E/S.
- INTCKO: Oscilador interno usado como reloj del microcontrolador y EC como reloj del USB con Fosc/4 como salida en RA6.
- XT: XTAL/ circuito resonante.
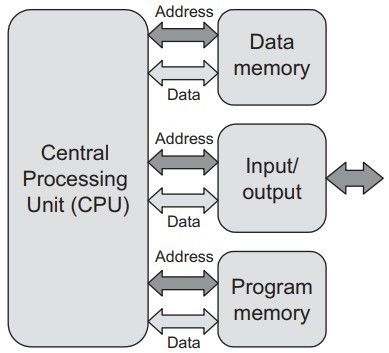
- Arquitectura
- Arquitectura interna
- Es Harvard, de forma que utiliza
memorias separadas para los datos y
las instrucciones
- Arquitectura interna
Anexos de mídia
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Quer criar seus próprios Mapas Mentais gratuitos com a GoConqr? Saiba mais.