31164304
Descrição
Mapa Mental por luisa fernanda otalora bernal, atualizado more than 1 year ago
|
|
Criado por luisa fernanda otalora bernal
mais de 3 anos atrás
|
|
Torsión y Flexión pura
- TORSIÓN
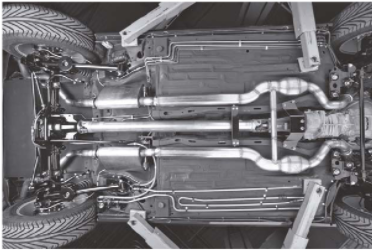
- El eje central conecta los
componentes del motor para
desarrollar el empuje para
impulsar al avión. Se analizaran
los elemento estructurales y
partes de maquinas que se
encuentran en torsión. Donde
los esfuerzos y deformaciones
en elementos de sección
trasversal circular se someten a
pares torsionales, o pares de
torsión T y T'.
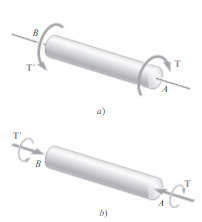
- Estos pares tienen una magnitud común
T y sentidos opuestos. Son cantidades
vectoriales que pueden representarse
mediante flechas curvas o por vectores
de par.
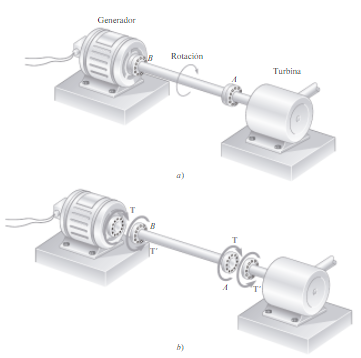
- Este sistema consiste en una
turbina A y un generador eléctrico
B conectados por un eje de
transición AB. Separando el
sistema en sus tres partes
componentes, la turbina ejerce un
par torsional o par de torsión T
sobre el eje, el cual ejerce
después un par de torsión sobre
el generador.
- El eje reacciona un par de torción T sobre la turbina.
- El eje reacciona un par de torción T sobre la turbina.
- Este sistema consiste en una
turbina A y un generador eléctrico
B conectados por un eje de
transición AB. Separando el
sistema en sus tres partes
componentes, la turbina ejerce un
par torsional o par de torsión T
sobre el eje, el cual ejerce
después un par de torsión sobre
el generador.
- Estos pares tienen una magnitud común
T y sentidos opuestos. Son cantidades
vectoriales que pueden representarse
mediante flechas curvas o por vectores
de par.
- Primero se analiza los
esfuerzos y las deformaciones
que ocurren en los ejes
circulares. Después se
deformara una propiedad
importante de los ejes
circulares. Por consiguiente,
mientras que las diversas
secciones trasversales a lo
largo del eje giran a través de
distintos ángulos, cada sección
transversal gira como una
placa solida rígida.
- Se utilizan las deformaciones en el
ángulo elástico y la ley de Hooke
para el esfuerzo y la deformación
cortantes, a fin de determinar la
distribución de esfuerzos
cortantes en un eje circular, así
como para deducir las formulas
para la torsión elástica
- El ángulo de torsión de un eje circular
sujeto a un par de torsión dado,
suponiendo deformaciones elásticas.
La solución de problemas que
involucran ejes elásticamente
indeterminados.
- El diseño de ejes de
transmisión, mediante la
determinación de las
características físicas de un eje
en términos de su velocidad
de rotación y potencia que
debe ser transmitida
- El diseño de ejes de
transmisión, mediante la
determinación de las
características físicas de un eje
en términos de su velocidad
de rotación y potencia que
debe ser transmitida
- El ángulo de torsión de un eje circular
sujeto a un par de torsión dado,
suponiendo deformaciones elásticas.
La solución de problemas que
involucran ejes elásticamente
indeterminados.
- Se utilizan las deformaciones en el
ángulo elástico y la ley de Hooke
para el esfuerzo y la deformación
cortantes, a fin de determinar la
distribución de esfuerzos
cortantes en un eje circular, así
como para deducir las formulas
para la torsión elástica
- Ejes circulares en torsión
- Esfuerzos de un eje
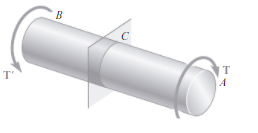
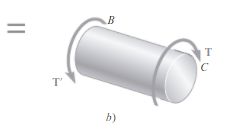
- Consiste en un eje AB sometido
en A y en B a partes de torsión T
y T' iguales y opuestos. Se pasa
una sección perpendicular al eje
de la flecha a través de algún
punto arbitrario C
- El diagrama del cuerpo libre de
proporción BC del eje debe
incluir las fuerzas cortantes
elementales dF que son
perpendiculares al radio del eje.
Estas surgen de los pares de
torsión de la porción AC ejerce
sobre BC al torcerse el eje
- Al denotar la distancia
perpendicular desde la fuerza dF
hasta el eje de la flecha, y
expresando la suma de momentos
de las fuerzas cortantes dF
alrededor de un eje es igual en
magnitud al par T, se escribe
como:
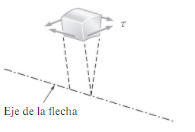
- El esfuerzo cortante no puede
tener lugar únicamente en un
plano, considere el pequeño
elemento mostrado a
continuación.
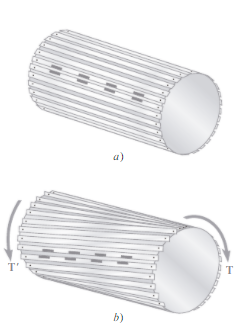
- No obstante, las condiciones de
equilibrio requieren la existencia de
esfuerzos iguales en las caras
formadas por los dos planos que
continúen al eje de la flecha. Puede
demostrarse que tales esfuerzos
cortantes ocurren realmente en
torsión considerando un eje
elaborado de cintas separadas
sujetas con pasadores en ambos
extremos a discos.
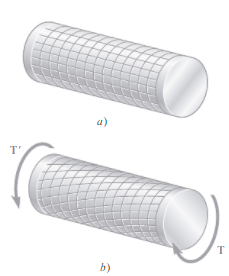
- Si se pintan marcas en dos cintas
adyacentes, se observa que la cinta
se desliza con un respecto a la
otra cunado se aplica pares iguales
y opuestos al eje.
- Si se pintan marcas en dos cintas
adyacentes, se observa que la cinta
se desliza con un respecto a la
otra cunado se aplica pares iguales
y opuestos al eje.
- No obstante, las condiciones de
equilibrio requieren la existencia de
esfuerzos iguales en las caras
formadas por los dos planos que
continúen al eje de la flecha. Puede
demostrarse que tales esfuerzos
cortantes ocurren realmente en
torsión considerando un eje
elaborado de cintas separadas
sujetas con pasadores en ambos
extremos a discos.
- El esfuerzo cortante no puede
tener lugar únicamente en un
plano, considere el pequeño
elemento mostrado a
continuación.
- Al denotar la distancia
perpendicular desde la fuerza dF
hasta el eje de la flecha, y
expresando la suma de momentos
de las fuerzas cortantes dF
alrededor de un eje es igual en
magnitud al par T, se escribe
como:
- El diagrama del cuerpo libre de
proporción BC del eje debe
incluir las fuerzas cortantes
elementales dF que son
perpendiculares al radio del eje.
Estas surgen de los pares de
torsión de la porción AC ejerce
sobre BC al torcerse el eje
- Deformaciones de un eje circular
- Caracteristicas de la deforción
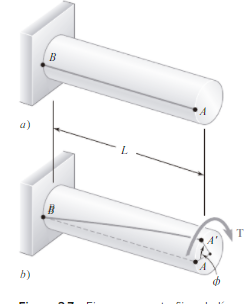
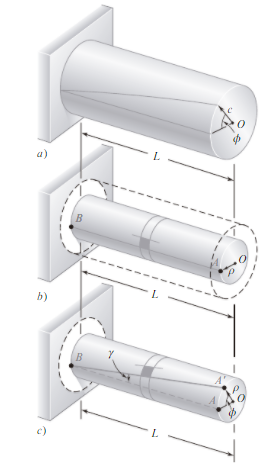
- Considere un eje
circular unido a un
soporte fijo en uno de
los extremos. Si se
aplica un par de
torsión T al otro
extremo, el eje se
torcerá, al girar su
extremo libre a través
de un ángulo llamado
ángulo de torsión.
- Cuando un eje circular se
somete a torsión, toda secion
transversal permanece plana y
sin distorsión. Dicho de otra
manera, mientras que las
distintas secciones
transversales a lo largo del eje
giran diferentes cantidades,
cada sección transversal giran
como una placa solida rigida
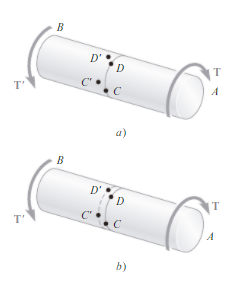
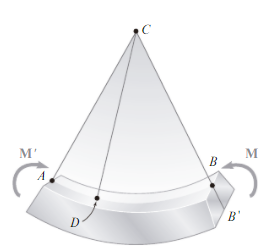
- Considere los puntos CD
localizados en la
circunferencia de la sección
transversal dada y C' y D'
de las posiciones que
ocupan después de que un
eje a sido torcido. La
simetría axial requiere que la
rotación que hubiera
causado que D llegara a D'
lleve a C a C'. Por lo tanto, C'
y D' deben estar en la
circunferencia de un circulo,
y el arco de C' Y D' debe
ser igual al arco de CD.
- Esta contradicción prueba que C'
Y B' se encuentran en el mismo
circulo que C y que D. Por lo
tanto, al ser torcido el eje el
circulo original solo gira sobre su
propio plano. Ya que el mismo
racionamiento puede aplicarse a
cualquier circulo concéntrico mas
pequeño localizado en la sección
transversal, toda la sección
transversal permanece plana .
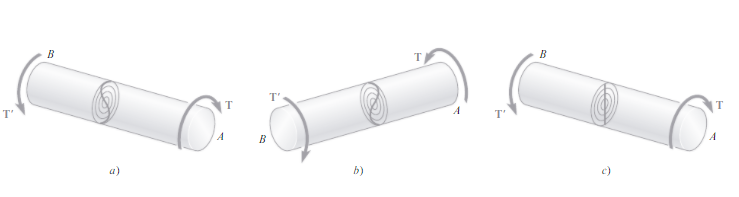
- Un observador que viera esta
curva desde A concluirá que las
capas externas del eje que se
tuercen más que las internas,
mientras un observador
colocado en B concluirá la
contrario. Esta inconsistencia
indica que cualquier diámetro de
una sección transversal dad
permanece recto, por lo tanto
cualquier sección trasversal
dada de un eje circular
permanece plana y sin
distorsión.
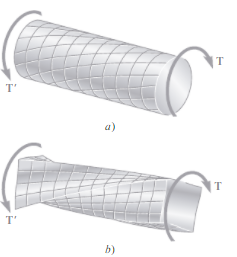
- Modo de aplicación de dos pares de torsión
T y T' . Si todas las secciones del eje,
desde un extremo hasta el otro, deben
permanecer planas y sin distorsión, los pares
se aplican de tal manera que los extremos
mismo del eje permanezcan planos. Todos
los círculos igualmente espaciados giraran en
l a misma cantidad en relación con sus
vecinos y cada una de las líneas rectas se
convertirán en curvas.
- Modo de aplicación de dos pares de torsión
T y T' . Si todas las secciones del eje,
desde un extremo hasta el otro, deben
permanecer planas y sin distorsión, los pares
se aplican de tal manera que los extremos
mismo del eje permanezcan planos. Todos
los círculos igualmente espaciados giraran en
l a misma cantidad en relación con sus
vecinos y cada una de las líneas rectas se
convertirán en curvas.
- Un observador que viera esta
curva desde A concluirá que las
capas externas del eje que se
tuercen más que las internas,
mientras un observador
colocado en B concluirá la
contrario. Esta inconsistencia
indica que cualquier diámetro de
una sección transversal dad
permanece recto, por lo tanto
cualquier sección trasversal
dada de un eje circular
permanece plana y sin
distorsión.
- Esta contradicción prueba que C'
Y B' se encuentran en el mismo
circulo que C y que D. Por lo
tanto, al ser torcido el eje el
circulo original solo gira sobre su
propio plano. Ya que el mismo
racionamiento puede aplicarse a
cualquier circulo concéntrico mas
pequeño localizado en la sección
transversal, toda la sección
transversal permanece plana .
- Considere los puntos CD
localizados en la
circunferencia de la sección
transversal dada y C' y D'
de las posiciones que
ocupan después de que un
eje a sido torcido. La
simetría axial requiere que la
rotación que hubiera
causado que D llegara a D'
lleve a C a C'. Por lo tanto, C'
y D' deben estar en la
circunferencia de un circulo,
y el arco de C' Y D' debe
ser igual al arco de CD.
- Cuando un eje circular se
somete a torsión, toda secion
transversal permanece plana y
sin distorsión. Dicho de otra
manera, mientras que las
distintas secciones
transversales a lo largo del eje
giran diferentes cantidades,
cada sección transversal giran
como una placa solida rigida
- Considere un eje
circular unido a un
soporte fijo en uno de
los extremos. Si se
aplica un par de
torsión T al otro
extremo, el eje se
torcerá, al girar su
extremo libre a través
de un ángulo llamado
ángulo de torsión.
- Deformaciones Constantes
- Este modelo ayuda a definir un
problema de torsión para el que puede
obtenerse una solución exacta gracias
a principio de Saint Venant, los
resultados obtenidos para el modelo
idealizado pueden extenderse a la
mayor parte de las aplicaciones de
ingeniería. Se determinara la
distribución de las formaciones
cortantes en un eje circular que ha
sido cortado en un ángulo.
- Este modelo ayuda a definir un
problema de torsión para el que puede
obtenerse una solución exacta gracias
a principio de Saint Venant, los
resultados obtenidos para el modelo
idealizado pueden extenderse a la
mayor parte de las aplicaciones de
ingeniería. Se determinara la
distribución de las formaciones
cortantes en un eje circular que ha
sido cortado en un ángulo.
- Caracteristicas de la deforción
- Consiste en un eje AB sometido
en A y en B a partes de torsión T
y T' iguales y opuestos. Se pasa
una sección perpendicular al eje
de la flecha a través de algún
punto arbitrario C
- Esfuerzos en el rango
elasticos
- Cuando el par de torsión T
es tal que todos los
esfuerzos cortantes se
encuentran por debajo de la
resistencia a la cedencia los
esfuerzos en el eje
permaneceran por debajo
del limite de
proporcionalidad y también
por debajo del limite elástico
utilizando la siguiente
ecuación.
- Cuando el par de torsión T
es tal que todos los
esfuerzos cortantes se
encuentran por debajo de la
resistencia a la cedencia los
esfuerzos en el eje
permaneceran por debajo
del limite de
proporcionalidad y también
por debajo del limite elástico
utilizando la siguiente
ecuación.
- Esfuerzos de un eje
- El eje central conecta los
componentes del motor para
desarrollar el empuje para
impulsar al avión. Se analizaran
los elemento estructurales y
partes de maquinas que se
encuentran en torsión. Donde
los esfuerzos y deformaciones
en elementos de sección
trasversal circular se someten a
pares torsionales, o pares de
torsión T y T'.
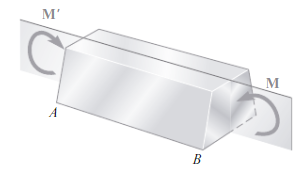
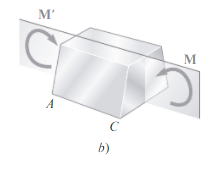
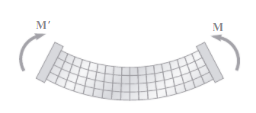
- Flexión Pura
- La flexión es un concepto
importante usado en el diseño de
muchos componentes de
maquinas y estructuras, como
vijias y trabes. Se ocupa del
análisis de miembros prismáticos
sometidos a momentos iguales y
opuestos M y M' que actúan en el
mismo plano longitudinal. Se dice
que tales miembros están
sometidos a flexión pura y se
supone que los miembros poseen
un plano de simétrica con los
momentos M y M' actuando en ese
plano.
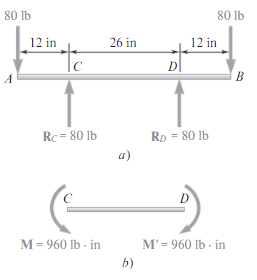
- La barra de pesas es un ejemplo de
flexión pura cuando un elevador de
pesas la sostiene sobre su cabeza, la
barra soporta pesos iguales a
distancias iguales de las manos del
elevador de pesas, por la simetría del
diagrama de cuerpo libre.
- Por consiguiente, en la
parte media CD de la
barra, los pesos y las
reacciones sean
reemplazados por dos
momentos iguales y
opuestos de 960 libras
- Al combinar nuestro
conocimiento de los esfuerzos
producidos por una carga
centrada y los resultados de
análisis de un esfuerzo en
flexión pura, se obtiene la
distribución de los esfuerzos
producidos por un a carga
excéntrica.
- Al combinar nuestro
conocimiento de los esfuerzos
producidos por una carga
centrada y los resultados de
análisis de un esfuerzo en
flexión pura, se obtiene la
distribución de los esfuerzos
producidos por un a carga
excéntrica.
- Por consiguiente, en la
parte media CD de la
barra, los pesos y las
reacciones sean
reemplazados por dos
momentos iguales y
opuestos de 960 libras
- La barra de pesas es un ejemplo de
flexión pura cuando un elevador de
pesas la sostiene sobre su cabeza, la
barra soporta pesos iguales a
distancias iguales de las manos del
elevador de pesas, por la simetría del
diagrama de cuerpo libre.
- Miembros simétricos
sometidos a flexión pura
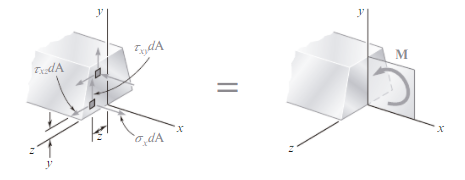
- Momento interno y relación de esfuerzos
- Considere un miembro
prismático AB que posee un
plano de simetría sometido
a momentos iguales y
opuestos M y M' que actúan
en dicho plano.
- Si el miembro AB se secciona
en algún punto arbitrario C, las
condiciones de equilibrio de la
parte AC del miembro requiere
que las fuerzas internas en la
sección sean equivalentes en el
momento M.
- Además, el momento es el mismo con
respecto a cualquier eje perpendicular a
su plano y es cero con respecto a
cualquier eje contenido en dicho plano.
- Además, el momento es el mismo con
respecto a cualquier eje perpendicular a
su plano y es cero con respecto a
cualquier eje contenido en dicho plano.
- Si el miembro AB se secciona
en algún punto arbitrario C, las
condiciones de equilibrio de la
parte AC del miembro requiere
que las fuerzas internas en la
sección sean equivalentes en el
momento M.
- Considere un miembro
prismático AB que posee un
plano de simetría sometido
a momentos iguales y
opuestos M y M' que actúan
en dicho plano.
- Deformaciones
- Sus extremos se
someten a momentos
iguales y opuestos M y M'
que actúan en el plano de
simetría. El miembro se
flexionara por la acción
de los momentos, pero
permanecerá simétrico
con respecto a dicho
plano.
- Sus extremos se
someten a momentos
iguales y opuestos M y M'
que actúan en el plano de
simetría. El miembro se
flexionara por la acción
de los momentos, pero
permanecerá simétrico
con respecto a dicho
plano.
- Esfuerzo y deformaciones en
el rango elastico
- Se considera el caso en el que el
momento flector M es tal que los
esfuerzos normales en el miembro
permanecen por debajo de la
resistencia a la cedencia. Esto
significa que los esfuerzos del
miembro permanecen por debajo
del limite proporcional y por debajo
del limite elástico. Supongamos que
el material es homogéneo y
denotado su modulo de elasticidad
como E, el esfuerzo normal en
dirección longitudinal es:
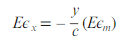
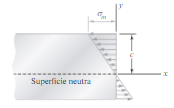
- Denota el valor máximo
absoluto del esfuerzo. Este
resultado muestra que, en
el rango elástico, el
esfuerzo normal varía
linealmente con la distancia
desde la superficie neutra.
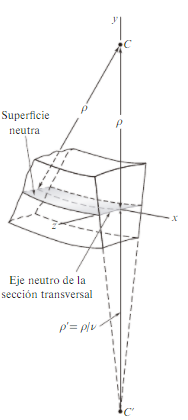
- Para un miembro
sometido a flexión pura y
mientras que los
esfuerzos permanezcan
en el rango elástico, el eje
neutro pasa por el
centroide de la sección. Al
especificar que el eje z
coincide con el eje neutro
de la sección transversal,
sustituyendo:
- Para la reflexión pura el
eje neutro pasa por el
centroide de la sección
transversal e I es el
momento de inercia o
segundo momento de
inercia o segundo
momento de área de la
sección transversal con
respecto a un eje
centroidal perpendicular
al plano del momento M.
Se obtiene el esfuerzo
normal a cualquier
distancia y del eje
neutro:
- La ecuación se conoce
como fórmula de flexión
elástica, y el esfuerzo
normal por el doblado o
"flexión" del miembro, a
menudo se denomina el
esfuerzo por flexión.
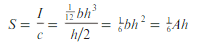
- Dado el esfuerzo máximo es
inversamente proporsion la al
modulo de sección elastico S, las
vigas debe diseñarse con un
valor de S tan grande como sea
practico. por ejemplo, una viga de
madera con una sección
trasversal regular de ancho y
altura h tiene:
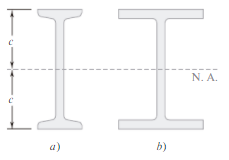
- En el caso del acero estructural,
se refiere las vigas americana
estándar o las vigas de brida o
ala ancha a otros perfile debido
a que una gran parte de su
sección transversal se
encuentra lejos del eje neutro.
- La deformación del miembro
producida por el momento
flector M se mide por la
curvatura de la superficie
neutra. La curvatura se
define como el reciproco
del radio de curva y se
obtiene resolviendo la
siguiente ecuación:
- En el caso del acero estructural,
se refiere las vigas americana
estándar o las vigas de brida o
ala ancha a otros perfile debido
a que una gran parte de su
sección transversal se
encuentra lejos del eje neutro.
- Dado el esfuerzo máximo es
inversamente proporsion la al
modulo de sección elastico S, las
vigas debe diseñarse con un
valor de S tan grande como sea
practico. por ejemplo, una viga de
madera con una sección
trasversal regular de ancho y
altura h tiene:
- La ecuación se conoce
como fórmula de flexión
elástica, y el esfuerzo
normal por el doblado o
"flexión" del miembro, a
menudo se denomina el
esfuerzo por flexión.
- Para la reflexión pura el
eje neutro pasa por el
centroide de la sección
transversal e I es el
momento de inercia o
segundo momento de
inercia o segundo
momento de área de la
sección transversal con
respecto a un eje
centroidal perpendicular
al plano del momento M.
Se obtiene el esfuerzo
normal a cualquier
distancia y del eje
neutro:
- Para un miembro
sometido a flexión pura y
mientras que los
esfuerzos permanezcan
en el rango elástico, el eje
neutro pasa por el
centroide de la sección. Al
especificar que el eje z
coincide con el eje neutro
de la sección transversal,
sustituyendo:
- Denota el valor máximo
absoluto del esfuerzo. Este
resultado muestra que, en
el rango elástico, el
esfuerzo normal varía
linealmente con la distancia
desde la superficie neutra.
- Se considera el caso en el que el
momento flector M es tal que los
esfuerzos normales en el miembro
permanecen por debajo de la
resistencia a la cedencia. Esto
significa que los esfuerzos del
miembro permanecen por debajo
del limite proporcional y por debajo
del limite elástico. Supongamos que
el material es homogéneo y
denotado su modulo de elasticidad
como E, el esfuerzo normal en
dirección longitudinal es:
- Momento interno y relación de esfuerzos
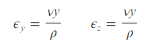
- Deformación de una sección transversal
- La seccion tranversal de un
miembro sometido a flexión
pura permanece plana, existe la
posibilidad de que ocurran
deformaciones dentro del plano
de la sección. La deformaciones
normales dependen de la
relación de Poisson, del material
empleado y se expresan como
- En un miembro de sección
transversal regular, la expansión
y contracción de los diversos
elementos en dirección vertical
se compensaran y no se
observara ningún cambio en
dimensión vertical de la sección
transversal.
- Esta situacion es similar a la que
ocurre en una sección transversal
longitudinal. El eje neutro de la
sección transversal se flexiona en
forma de circulo, el centro se prima
de este circulo se encuentra bajo la
superficie neutra es decir, en el lado
opuesto de centro de curvatura C
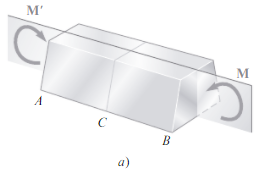
- Se analizara la manera en que
se aplican los momentos M y
M' al miembro. Si todas las
secciones transversales del
miembro, de un extremo al
otro, han de permanecer
planas y libres de fuerzas
cortantes, los momentos
deben aplicar de modo que
los extremos permanezcan
planos y libres de esfuerzos
cortantes.
- Estas condiciones de carga en realidad no
pueden llevarse a cabo, ya que requieren que
cada placa ejerza fuerza de tensión en la
sección extrema correspondiente debajo de
su eje neutro, al mismo tiempo que permite
que se deformen libremente en su propio
plano.
- Las condiciones de cargas reales
pueden diferir apreciablemente de
este modelo idealizado, sin
embargo si se utiliza el principio
de Saint Venant, se pueden usar
estas relaciones para calcular
esfuerzos en situación de
ingeniería en tanto la sección
considerada no este demasiado
cerca de los punto donde se
aplican los momentos.
- Las condiciones de cargas reales
pueden diferir apreciablemente de
este modelo idealizado, sin
embargo si se utiliza el principio
de Saint Venant, se pueden usar
estas relaciones para calcular
esfuerzos en situación de
ingeniería en tanto la sección
considerada no este demasiado
cerca de los punto donde se
aplican los momentos.
- Estas condiciones de carga en realidad no
pueden llevarse a cabo, ya que requieren que
cada placa ejerza fuerza de tensión en la
sección extrema correspondiente debajo de
su eje neutro, al mismo tiempo que permite
que se deformen libremente en su propio
plano.
- Se analizara la manera en que
se aplican los momentos M y
M' al miembro. Si todas las
secciones transversales del
miembro, de un extremo al
otro, han de permanecer
planas y libres de fuerzas
cortantes, los momentos
deben aplicar de modo que
los extremos permanezcan
planos y libres de esfuerzos
cortantes.
- Esta situacion es similar a la que
ocurre en una sección transversal
longitudinal. El eje neutro de la
sección transversal se flexiona en
forma de circulo, el centro se prima
de este circulo se encuentra bajo la
superficie neutra es decir, en el lado
opuesto de centro de curvatura C
- En un miembro de sección
transversal regular, la expansión
y contracción de los diversos
elementos en dirección vertical
se compensaran y no se
observara ningún cambio en
dimensión vertical de la sección
transversal.
- La seccion tranversal de un
miembro sometido a flexión
pura permanece plana, existe la
posibilidad de que ocurran
deformaciones dentro del plano
de la sección. La deformaciones
normales dependen de la
relación de Poisson, del material
empleado y se expresan como
- La flexión es un concepto
importante usado en el diseño de
muchos componentes de
maquinas y estructuras, como
vijias y trabes. Se ocupa del
análisis de miembros prismáticos
sometidos a momentos iguales y
opuestos M y M' que actúan en el
mismo plano longitudinal. Se dice
que tales miembros están
sometidos a flexión pura y se
supone que los miembros poseen
un plano de simétrica con los
momentos M y M' actuando en ese
plano.
- Luisa Fernanda Otalora Bernal
Anexos de mídia
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Quer criar seus próprios Mapas Mentais gratuitos com a GoConqr? Saiba mais.