5639399
Description
Quiz by Łukasz Drożdż, updated more than 1 year ago
|
|
Created by Łukasz Drożdż
over 8 years ago
|
|
Question 1
Question
Dynamiczny system to:
Answer
-
stan wyjścia zależy od stanu wejścia i od poprzednich chwil czasowych wyjścia i wejścia
-
opisany jest równaniem y = x + 6
-
„jak przelewa się energia”
-
opisuje statykę i dynamikę
Question 2
Question
Statyczny system:
Answer
-
otrzymujemy po przyrównaniu pochodnych do zera
-
otrzymujemy po przyrównaniu chwil czasowych do jedności
-
otrzymujemy po przyrównaniu chwil czasowych do zera
-
otrzymujemy po przyrównaniu jednej strony równania algebraicznego do zera
Question 3
Question
Dynamika w obiekcie opisanym równaniem mx'' + Dx' + kx = y zależy od:
Answer
-
współczynnika x''
-
parametru konstrukcyjnego D w sposób liniowy
-
współczynnika D w sposób nieliniowy
-
współczynnika D w sposób liniowy
Question 4
Question
Stacjonarność w obiekcie opisanym równaniem mx'' + Dx' + kx = y zależy od:
Answer
-
współczynnika k
-
współczynnika x'
-
parametru konstrukcyjnego D
-
zmienności w czasie współczynników
Question 5
Question
Zmienne w równaniu mx'' + D^2x' + k^3 x = y zależą od:
Answer
-
czasu i opisują obiekt nieliniowy
-
są nieliniowe
-
uniemożliwiają jego rozwiązanie
-
są liniowe
Question 6
Question
Równanie mx'' + D^2x' + k^3 x = y opisuje obiekt:
Answer
-
niestacjonarny
-
nieliniowy
-
stacjonarny
-
liniowy
Question 7
Question
Liniowość obiektu umożliwia:
Answer
-
dodawanie w równaniu współczynników do siebie
-
zastosować zasadę superpozycji
-
dodawanie w równaniu parametrów do siebie
-
dodawanie zmiennych i ich pochodnych do siebie
Question 8
Question
Ciągły obiekt to taki, który (którego):
Answer
-
czas próbkowania dąży do nieskończoności
-
nie zależy od czasu próbkowani
-
czas próbkowania dąży do zera
-
zależy od czasu próbkowani
Question 9
Question
Obiekt opisany równaniem różnicowym m_i = 0,1x_i + x_(i-1) + 2t*x_(i-2) - m_(i-1)
Answer
-
jest nieliniowy
-
jest niestacjonarny
-
jest ciągły
-
jest dynamiczny
Question 10
Question
Za pomocą transmitancji s lub z możemy opisać obiekt:
Answer
-
dynamiczny
-
liniowy
-
nieliniowy
-
statyczny
Question 11
Question
System jest obserwowalny wtedy, jeżeli:
Answer
-
zapala się zielona lampka RUN w sterowniku (PLC)
-
w przebiegu wyjściowym występują wszystkie zmienne stanu
-
na podstawie sygnału wyjściowego możemy określić stan obiektu w dowolnej chwili w przeszłości
-
jeden ze współczynników w macierzy A jest zależny od czasu
Question 12
Question
System jest sterowalny wtedy, jeżeli:
Answer
-
możemy za przyspieszenie podstawić prędkość
-
w skończonym czasie jesteśmy w stanie przeprowadzić go do dowolnego punktu w przestrzeni
-
jesteśmy w stanie oddziaływać za pomocą sygnału sterującego na wszystkie składowe występujące we współrzędnych stanu
-
wyznaczyć dobre sterowanie (spełniające narzucone kryterium jakości sterowania)
Question 13
Question
Obiekt dynamiczny można opisać za pomocą:
Answer
-
równania różniczkowego
-
równania algebraicznego
-
nieliniowego równania różnicowego
-
równań stanu
Question 14
{kind=link}
Answer
-
dwa różne obiekty
-
ten sam obiekt
-
ten sam obiekt ale przesunięty do przodu o dwie próbki
-
ten sam obiekt ale przesunięty do tyłu o dwie próbki
Question 15
Question
Jaka jest różnica pomiędzy algorytmem prędkościowym a przyrostowym ?
Answer
-
przyrostowy ma całkowanie w sobie
-
tylko w nazwie
-
nie ma różnicy
-
prędkościowy nadaje się do wpisania do sterownika a przyrostowy nie jest przystosowany
Question 16
Question
Model ARMA :
Answer
-
jest najpopularniejszym modelem
-
nie zawiera części autoregresyjnej
-
zapewnia dobre wygładzanie nawet przy małej liczbie elementów
-
jest filtrem
Question 17
Question
Czy w systemie rozproszonym:
Answer
-
sterowniki można połączyć jednym przewodem do przesyłania danych
-
komputery (sterowniki) można połączyć w sieć
-
możliwe jest, ze jak komputer się uszkodzi to sąsiedni przejmuje jego zadania
-
sterownikowym dane można przesyłać na odległości większe niż 3000 m
Question 18
Question
Sieć przemysłowa powinna cechować się:
Answer
-
połączeniem pierścieniowym
-
większa odpornością na zakłócenia przemysłowe
-
tylko protokółem komunikacyjnym Ethernet Industrial
-
wymogiem pracy w czasie rzeczywistym
Question 19
Question
Czy w języku maszynowym widoczne są:
Answer
-
rozkazy
-
instrukcje
-
polecenia
-
kody, listy rozkazów procesora
Question 20
Question
Czy w języku symbolicznym niższego poziomu stosujemy:
Answer
-
instrukcje
-
rozkazy
-
polecenia
-
zakazy
Question 21
Question
Oprogramowanie po uruchomieniu musi być:
Answer
-
przejrzyste
-
jednoznaczne
-
kompletne
-
dychotomiczne
Question 22
Question
Po faktoryzacji transmitancja jest:
Answer
-
mniej przejrzysta
-
lepiej są widoczne bieguny i zera
-
stabilna
-
minimalnofazowa
Question 23
Question
Zastosowanie układu regulacji z regulatorem typu P:
Answer
-
likwiduje uchyb ustalony
-
ogranicza zmienność parametrów
-
likwiduje wpływ zakłóceń
-
zwiększając wartość współczynnika wzmocnienia (P) zwiększamy uchyb ustalony
Question 24
Question
Sterowanie adaptacyjne stosujemy gdy obiekt:
Answer
-
ma duże stałe czasowe
-
ma duży czas opóźnienia
-
jest nieliniowy
-
jest niestacjonarny
Question 25
Question
Sterownik kompaktowy to taki, który
Answer
-
przystosowany jest do ognioszczelnych obudów
-
może być stosowany jako inteligentny przekaźnik
-
ma wiele zaawansowanych cech dużego sterownika w stosunkowo tanim i małym sterowniku
-
można go programować w języku C++
Question 26
Question
Zjawisko stroboskopowe:
Answer
-
to jest to samo co aliasing
-
pokazują się w sygnale wyjściowym wysokie częstotliwości
-
należ zmniejszyć częstotliwość próbkowania
-
należy zwiększyć częstotliwość próbkowania
Question 27
Question
Program do sterownika powinien:
Answer
-
mięć jak najmniej czasówek i zegarów
-
dla szczebla drabinki powinien mieć strukturę trójkąta od największej liczby styków do mniejszej
-
mieć jak najmniej instrukcji do komunikacji miedzy sterownikami
-
im większą liczbą instrukcji rozwiążemy dane zadanie tym program będzie lepszy
Question 28
Question
W generatorze impulsów jak na rysunku należy wstawić na górze:
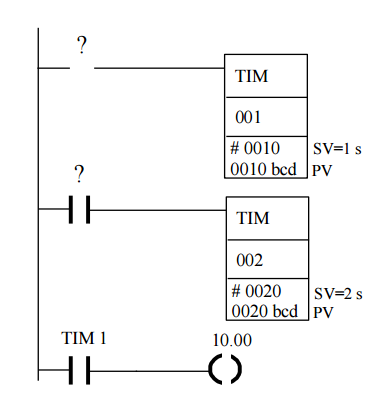{kind=link}
Answer
-
styk normalnie otwarty z adresem TIM2 a na dole TIM1
-
styk normalnie otwarty z adresem TIM1 a na dole TIM2
-
styk normalnie zamknięty z adresem TIM1 a na dole TIM2
-
styk normalnie zamknięty z adresem TIM2 a na dole TIM1
Question 29
Question
Zakładają, że są poprawnie wpisane adresy i styk to czasówka TIM2:
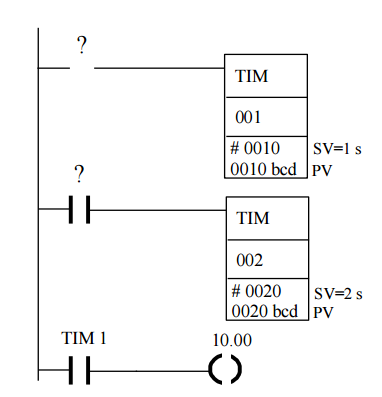{kind=link}
Answer
-
będzie w stanie jedynki przez 2 sekundy
-
będzie w stanie jedynki przez 20 sekund
-
będzie w stanie jedynki przez czas jednego cyklu
-
będzie w stanie jedynki przez 1 sekundę
Question 30
Question
Jak w licznikach eliminuje się „drgania” styków aby nie zliczały tych drgań:
Answer
-
równolegle podłącza się diodę rozładowczą z cewką
-
dodaje się na wejście dodatkową indukcyjność
-
wprowadza się minimalną długość trwania stanu jedynki aby uznać ten stan za poprawny
-
po zliczeniu odejmuje się liczbę niepotrzebnych „drgań”
Question 31
Question
Sygnał deterministyczny:
Answer
-
da się opisać parametrami statystycznymi (wartością średnią, wariancją itd.)
-
jest powtarzalny
-
da się opisać amplitudą, okresem i przesunięciem fazowym
-
da się opisać równaniem różnicowym
Question 32
Question
Jeżeli tor pomiarowy jest sprzężeniem zwrotnym to:
Answer
-
powinien on być zwrócony przeciwnie do toru głównego
-
zaczynać się od węzła sumacyjnego a kończyć na wyjściu
-
być maksymalnie odpornym na wpływ zakłóceń
-
nie zawierać elementów całkujących
Question 33
Question
Aby dobrać nastawy regulatora PID niezbędny jest
Answer
-
model matematyczny obiektu
-
wstępna znajomość parametrów regulatora
-
w układzie zamkniętym pozostawić tyko wzmocnienie i zwiększać go do wystąpienia oscylacji
-
w układzie otwartym określić wartości opóźnienia L i dominującej stałej czasowej Tp
Question 34
Question
Do oceny układu regulacji niezbędna jest znajomość:
Answer
-
punktu pracy
-
czy układ jest stabilny
-
czy uchyb ustalony zmierza asymptotycznie do nieskończoności
-
czy układ jest wrażliwy na zmianę pogody
Question 35
Question
Czy wskaźniki całkowe są:
Answer
-
funkcjonałami
-
nie informują o wartości uchybu ustalonego
-
nadają się tyko dla stanów ustalonych
-
nadają się tyko dla stanów nieustalonych
Question 36
Question
Regulator Smitha stosujecie dla układów:
Answer
-
o dużej dominującej stałej czasowej
-
z dużym czasem opóźnienia
-
niesterowalnych
-
z dużą histerezą
Question 37
Question
Superkomputery stosuje się:
Answer
-
tylko do gry w szachy
-
do obliczania wartości Flopów
-
do obliczenia macierzy co najmniej 1 000 na 1 000
-
z systemem operacyjnym Windows
Question 38
Question
Sterowanie zaawansowane:
Answer
-
ułatwia sterowanie ręczne
-
stosuje do dostrajania regulatora PID
-
zmniejsza straty podczas porodukcji i podnosi jakość wyrobu
-
stosuje identyfikację do określenia optymalnego sterowania
Question 39
Question
Jedno wyjście cyfrowe (dwustanowe) ze sterownika pozwala sterować;
Answer
-
zmianą kierunków obrotu bez dodatkowego elementu
-
zadowalająco w sposób ciągły obiektem o dużej stałej czasowej
-
pracą trzystanowego urządzenia
-
grzałką zmieniającą temperaturę w zbiorniku
-
C. Obiektem o mocy 10kW
-
D. Grzałką o mocy 200 W, która stabilizuje temperaturę wody w zbiorniku
Question 40
Question
Bifurkacja przyczynia się do:
Answer
-
zwiększenia prędkości obiektu
-
rozdwojenia rozwiązania równania liniowego
-
rozgałęzienie rozwiązania na skutek zmiany parametru
-
zmniejszenia wartości parametru bifurkacyjnego
Question 41
Question
Chaos występuje gdy:
Answer
-
mała zmiana warunków początkowych powoduje bardzo duże zmiany wyjścia
-
mamy do czynienia z nieliniowymi algebraicznymi równaniami
-
mamy do czynienia z nieliniowymi równaniami różniczkowymi lub różnicowymi
-
układ zbliża się do granicy stabilności
Question 42
Question
Szeregowe połączenie regulatorów wymaga, aby:
Answer
-
pętle sprzężeń zwrotnych się krzyżowały
-
stała czasowa pletli wewnętrznej musi być większa od stałej czasowej pętli zewnętrznej
-
stała czasowa pletli wewnętrznej musi być mniejsza od stałej czasowej pętli zewnętrznej
-
regulatory były tego samego typu np. PI
Question 43
Question
Przy użyciu implikacji (JEŻELI - TO) można:
Answer
-
opisać działanie każdego układu
-
zbudować bazę wiedzy do regulatora rozmytego
-
dobrać nastawy regulatora PID
-
zlikwidować uchyb regulacji
Question 44
Question
Zagęszczenie funkcji przynależności:
Answer
-
może być stosowane tylko w modelu Majdaniego
-
utrudnia pisanie reguł
-
zwiększa w tym obszarze wrażliwość na sygnał wejściowy
-
stosuje się dla układów nieliniowych
-
stosuje się dla układów przełączających
Question 45
Question
Regulator rozmyty w stosunku do klasycznego PID:
Answer
-
nie generuje fałszywych sygnałów w stanach przejściowych
-
może regulować obiektem nieliniowym
-
może regulować obiektem niestacjonarnym
-
ma bazę wiedzy, która jest zawsze pełne i precyzyjne
Question 46
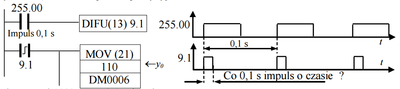{kind=link}
Answer
-
czas wypełnienia wynosi 10% czasu 0,1 sekundy
-
służy do synchronizacji czasowej jako czas próbkowania
-
musi być krótszy od czasu cyklu programu
-
ma czas trwania równy cyklowi programu
Question 47
Question
Układ zatrzaskowy, z samopodtrzymaniem:
Answer
-
stosuje się w przerzutnikach aby nie zmieniały stanu
-
umożliwia załączać urządzenia połączone z wyjściami sterownika bez uciążliwego trzymania przycisku START
-
może być zrealizowany na układach pamięciowych SET i RSET
-
kolejność instrukcji nie wpływa na priorytet załączania lub wyłączania
Question 48
Question
Przy priorytecie dla warunku STOP, równoczesne naciśnięcie przycisku START I STOP powoduje:
Answer
-
załączenie wyjścia
-
o stanie wyjścia decyduję ostatni wypracowany warunek (RLO)
-
wyłączenie wyjścia
-
zatrzymanie pracy sterownika
Question 49
Question
Czy omronowska czasówka bez dodatkowych warunków jest układem, który:
Answer
-
przechodzi w stan wysoki po zadanym czasie i wyłącza się po 10 ms
-
przechodzi w stan niski po zadanym czasie
-
ma stan wysoki przez zadany czas
-
przechodzi w stan wysoki po zadanym czasie
Question 50
Question
Dane w sieci komputerowej, gdy przechodzą z górnych warstw do dolnych to:
Answer
-
„przybierają” na objętości
-
pozostają zawsze stałe
-
są w każdej warstwie kontrolowane na parzystość lub inną kontrolę
-
operator może zmieniać ramki
Question 51
Question
Co jest główną wadą w sterownikach wyjść przekaźnikowych:
Answer
-
brak izolacji pomiędzy sterownikiem a elementem wykonawczym
-
zbyt szybka zmiana wyjścia często krótsza od czasu cyklu np. 2 ms
-
mała żywotność mechaniczna rzędu 10 000 przełączeń
-
brak sygnalizacji ich stanu
Question 52
Question
Przy stosowaniu algorytmu prędkościowego obiekt musi być:
Answer
-
nieliniowy
-
całkujący
-
odporny na zakłócenia
-
niestacjonarny
Question 53
Question
Układ regulacji traktujemy jako jednowymiarowy typu SISO a mamy dwa wejścia: zadające i
zakłócające:
Answer
-
bo zakładamy, że zakłócenie jest pomijalne
-
bo zakłócenie oddziałuje w innym miejscu, nie na wejściu
-
bo zakładamy, że zakłócenie jest stałe lub typu białego szumu
-
bo znamy przebieg zakłócenia
Question 54
Question
Czas próbkowania można określić:
Answer
-
z najwęższego impulsu w przebiegu
-
na podstawie wartości częstotliwości granicznej
-
z przeregulowania
-
z wartości uchybu ustalonego
Question 55
Question
Synchronizacja z czasem rzeczywistym:
Answer
-
przerzutniki mogą zmieniać stan co cykl
-
umożliwia przetłaczać licznik w początku czasu próbkowania
-
umożliwia utrzymanie stałych wartości współczynników równania, niezależnych od czasu próbkowania
-
umożliwia zsynchronizowanie się z czasówkami znajdującymi się w programie
Question 56
Question
Gdy zwłoka czasowa wynosi L to czas próbkowania powinien:
Answer
-
być równy L
-
być równy 0,1 L
-
być równy 1/3 L
-
być równy ½ L
Question 57
Question
Modulacja:
Answer
-
szerokości impulsów (PWM) i czasu trwania (PDM) to nie te same typy
-
cyfrowa nie umożliwia przesyłanie sygnału o stałej wartości
-
umożliwia przesłanie sygnału na dużą odległość
-
po tym procesie sygnał jest mniej wrażliwy na zakłócenia
Question 58
Question
Enkoder:
Answer
-
bezwzględny 12 bitowy nie wykrywa kierunku
-
przyrostowy nie wykrywa kierunku
-
tewersyjny nie wykrywa kierunku
-
bezwzględny nie stosuje kodu Gray’a
Question 59
Question
Przerwania:
Answer
-
na różnych wejściach (sprzętowe) ich priorytet nie zależą od numeru wejścia
-
szybkie licznikowe mają wyższy priorytet niż sprzętowe
-
sprzętowe maja wyższy priorytet niż czasowe (programowe)
-
mają priorytety, które są potrzebne wtedy gdy mamy wiele przerwań z tego samego źródła
-
dla kilku urządzeń mają priorytety od najniższego numeru wejścia do najwyższego
Question 60
Question
Na długość czasu cyklu sterownika ma wpływ:
Answer
-
czas odpowiedzi sterownika
-
długości programu
-
moment włączania wejść
-
temperatura otoczenia
-
stała czasowa obiektu sterowania
-
liczba urządzeń peryferyjnych obsługiwanych przez sterownik
Question 61
Question
W systemie rozproszonym:
Answer
-
sterownik można odłączyć na pewien czas od modułu komunikacyjnego bez utraty danych
-
komputery (sterowniki) można połączyć w sieć
-
możliwe jest, ze jak komputer (sterownik) się uszkodzi to sąsiedni przejmie jego zadania
-
dane w sterownikach przewodowo można przesyłać na odległości większą niż 100 km
Question 62
Question
Program do sterownika powinien:
Answer
-
mieć mniej więcej równą liczbę czasówek i zegarów
-
dla szczebla drabinki powinien mieć strukturę trójkąta od największej liczby styków do mniejszej
-
mieć jak najmniej instrukcji do komunikacji miedzy sterownikami
-
im większą liczbą instrukcji rozwiążemy dane zadanie tym program będzie lepszy
Question 63
Question
Sygnał deterministyczny:
Answer
-
wystarczy opisać parametrami statystycznymi (wartością średnią, wariancją itd.)
-
jest powtarzalny dla tego samego wymuszenia i zakłócenia
-
da się opisać równaniem różniczkowym
-
da się opisać równaniem różnicowym o stałych współczynnikach
Question 64
Question
Przy priorytecie dla warunku STOP, równoczesne
naciśnięcie przycisku START I STOP powoduje:
Answer
-
załączenie wyjścia
-
dla instrukcji SET i RSET o stanie wyjścia decyduje ostatni wypracowany warunek (RLO)
-
wyłączenie wyjścia
-
awarię w pracy sterownika
Question 65
Question
Czas cyklu jest w stosunku do czasu odpowiedzi:
Answer
-
taki sam
-
dłuższy o 10 ms
-
nieprecyzyjnie dłuższy o 1,5÷2,5 cyklu
-
pomijalnie krótki
Question 66
Question
Jeżeli w programie uruchamiane są np. dwa wyjścia
(cewki) o tych samych adresach to:
Answer
-
załączy się druga a nie pierwsza
-
o stanie cewki decyduje ostatni wyliczony wynik operacji logicznej
-
załączy się pierwsza a druga nie
-
wystąpi ostrzeżenie w sterowniku
Question 67
Question
W kodzie BCD pojemność licznika to 9 999:
Answer
-
jego pojemność możemy zwiększyć przechodząc na zapis binarny
-
nie wymaga zerowania
-
można zastosować bit CARRY (przeniesienia) do zwiększenia pojemności
-
najczęściej minimalny czas trwania impulsów wejściowych ustawiony jest na około 8 ms
Question 68
Question
Symulator sterownika umożliwia:
Answer
-
sprawdzić program bez posiadania sterownika
-
umożliwia podłączenie do Twojego PC sterownika
-
wykorzystać model (symulator) w innych programach
-
tylko on monitorować stany styków podczas pracy sterownika
Question 69
Question
Adresowanie pośrednie z rejestrami indeksowymi:
Answer
-
wyklucza obliczenia na macierzach
-
jest przydatne dla obiektów o dużych stałych czasowych
-
umożliwia realizować skomplikowane obliczenia na tablicach danych
-
korzysta z pamięci podręcznej
Question 70
Question
Po wprowadzeniu wskaźnika instrukcją MOVR 3 IR2
co się stanie po instrukcji MOV #5 ,-IR2
Answer
-
uruchomi się w sterowniku wyjście 3.1 i 3.2
-
uruchomi się w sterowniku wyjście 2.5
-
uruchomi się w sterowniku wyjście 3.1 i 2.14
-
uruchomi się w sterowniku wyjście 2.0 i 2.2
Question 71
Question
Bezszwowe komunikacyjne systemy sterownikowe polegają
Answer
-
wyeliminowaniu potrzeby stosowania mastera w sieci
-
możliwościach komunikacyjnych, które wzajemnie się nakładają
-
wyeliminowaniu stosowania modułu komunikacyjnego w sterowniku
-
złagodzeniu kolizji pomiędzy pakietami i komórkami w protokole komunikacyjnym
Question 72
Question
Urządzenia peryferyjne można połączyć ze sterownikiem w
celach komunikacyjnych kabelkiem do RS 232C
Answer
-
po wybraniu z biblioteki gotowego bloku funkcji
-
po dokonaniu ustawień w set-upie sterownika
-
po wcześniejszym odłączeniu od laptopa
-
po napisaniu protokołu komunikacyjnego w CX-Protocol
Question 73
Question
Rynek zdominowały superkomputery o architekturze:
Answer
-
jednoprocesorowej i szybkim połączeniu między nimi
-
klastrowej i konstelacyjnej
-
wieloprocesorowej typu MIMD
-
wektorowej
Question 74
Question
Dlaczego w przyciskach bezpieczeństwa zaleca się
stosować styki normalnie zamknięte?
Answer
-
bo są większość czasu zwarte i nie utleniają się w miejscu styku
-
przerwa w okablowaniu natychmiast objawia się wyłączeniem
-
bo sprężyna w nich występująca nie ulega szybkiemu zużyciu
-
podczas zadziałania przycisku łuk prądowy mniej niszczy styki
Question 75
Question
Czy program w języku tekstowym do sterownika
można pisać w Wordzie?
Answer
-
nie można
-
można
-
jest celowe (wtf??)
-
tak, ale bez znaku średnika „;”
Question 76
Question
Na sprzęcie podawana jest dwucyfrowa klasa
zabezpieczenia obudowy IP.
Answer
-
pierwsza cyfra dotyczy wielości otworów zabezpieczających od wody a druga od pyłów i obcych ciał stałych
-
im klasa niższa tym lepiej zabezpieczone jest urządzenie
-
pierwsza cyfra dotyczy wielości otworów zabezpieczających od pyłów i obcych ciał stałych a druga od wody
-
im klasa wyższa tym lepiej zabezpieczone jest urządzenie
Question 77
Question
Czym się różni w sterownikach ALARM od BŁĘDU?
Answer
-
to jest to samo
-
ALARM wyłącza sterownik a BŁĄD pokazuje się w oknie edycyjnym
-
ALARM informuje a BŁĄD wyłącza sterownik
-
ALARM wyłącza sterownik i informuje o przyczynie a BŁĄD po kompilacji pokazuje się w oknie wyjściowym
Question 78
Question
W jaki sposób stosując regulator PID do sterowania obiektem
nieliniowym uzyskać zadowalającą jakość sterowania?
Answer
-
zlinearyzować obiekt
-
podzielić zakres sterowania na przedziały i np. regulatorem rozmytym zmieniać odpowiednio przedziały
-
zastosować układ adaptacyjny i zmieniać nastawy regulatora wraz ze zmianą punktu pracy
-
regulator PID stosować można tylko dla obiektów liniowych
Question 79
Question
Najlepszego programistę można poznać po:
Answer
-
po jego samochodzie
-
po rzadkim stosowaniu instrukcji MOV
-
najkrótszym kodzie wynikowym i oprogramowaniu jednoznacznym i kompletnym
-
liczbie użytych podprogramów
Question 80
Question
Jak wydrukować raporty o produkcji ze sterownika?
Answer
-
podłączyć drukarkę do wyjścia cyfrowego (drukarka musi być przystosowana do współpracy ze złączem szeregowym)
-
jeżeli korzystamy z ekranu LCD to mają one złącze szeregowe i można wydrukować ekrany
-
jeżeli jesteśmy podłączeni sterownikiem do sieci to z komputera z oprogramowaniem SCADA
-
jeżeli sterownik ma USB to automatycznie drukują się pliki z raportami
Question 81
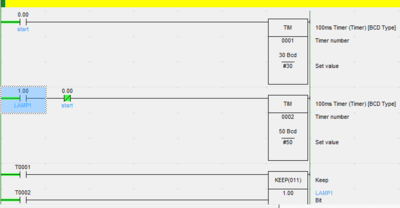{kind=link}
Answer
-
Stan jedynki styku start ( przyciśnięty ) powinien trwać dłużej niż 3 sekundy, aby było opóźnienie wyjścia 1.00 o 3 sekundy
-
Krótkie naciśnięcie styku START uruchamia wyjście 1.00 po 3 sekundach
-
TIM 2 jest jedynką przez jeden cykl jeżeli START był naciśnięty krócej niż 3 sekundy
-
Wyjście 1.00 załączy się po czasie 3 sek a wyłączy po 5 sek jak START przestanie być jedynką
Question 82
Question
Jaki styk uruchomi wyjście 10.0 po minucie?
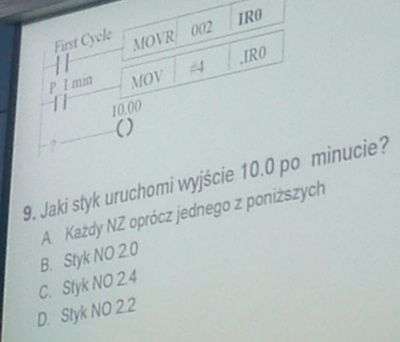{kind=link}
Answer
-
Każdy NZ oprócz jednego z poniższych
-
Styk NO 2.0
-
Styk NO 2.4
-
Styk NO 2.2
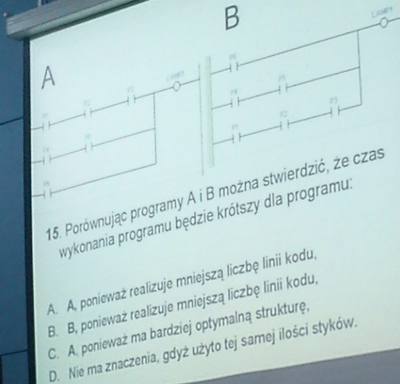
Question 83
{kind=link}
Answer
-
A, ponieważ realizuję mniejszą liczbę linii kodu
-
B, ponieważ realizuję mniejszą liczbę linii kodu
-
A, ponieważ ma bardziej optymalną strukturę
-
Nie ma znaczenia, gdyż użyto tej samej ilości styków
Question 84
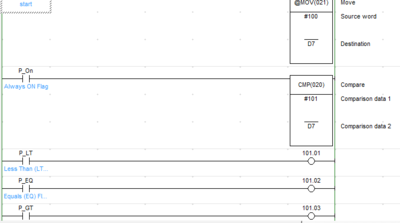
Question
Po wciśnięciu przycisku start (NO) zostanie załączone wyjście:
{kind=link}
Answer
-
101.01
-
101.02
-
101.03
-
101.01 i 101.03
Question 85
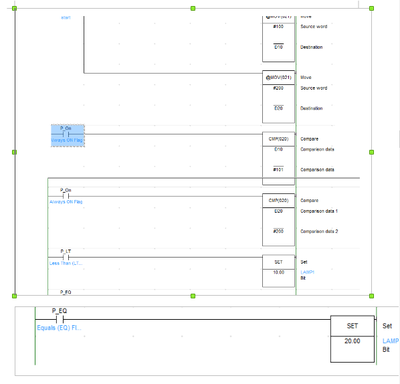
Question
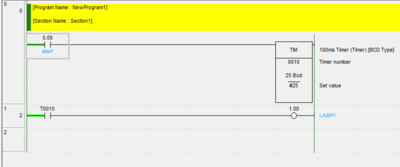
Po wciśnięciu przycisku start (NO) zostanie załączone wyjście:
{kind=link}
Answer
-
LAMP 1
-
LAMP 2
-
Obydwa
-
Żadne
Question 86
Question
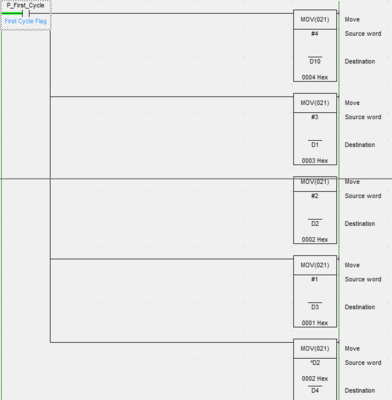
Po wciśnięciu przycisku start (NO) ustawione zostaną następujące bity słowa W200
{kind=link}
Answer
-
Nie można określić, gdyż zależy to od czasu wykonania programu i długości wciśnięcia przycisku
-
0,4,13,13,14
-
1,5,6,14,15
-
Nie zostaną żadne bity , gdyż w programie nie ma żadnej cewki ani instrukcji SET i KEEP
Question 87
Question
Po 2 krotnym wciśnięciu przycisku start (NO) ustawi się:
{kind=link}
Answer
-
Nie można określić , gdyż zależy to od czasu wykonania programu i długości wciśnięcia przycisku
-
Bit 6 słowo IR 80
-
Bit 6 słowo W200
-
Bity 1,2 słowa W200
Question 88
Question
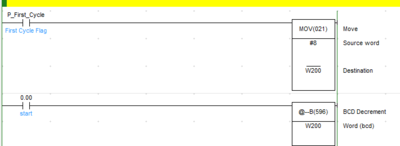
Po wciśnięciu przycisku start (NO) słowo W200 przyjmie wartość:
{kind=link}
Answer
-
#4
-
#3
-
#2
-
#1
Question 89
Question
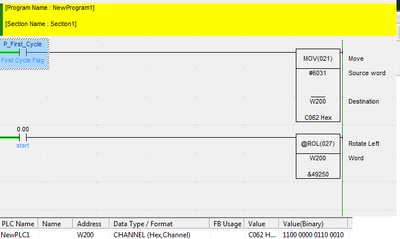
Po wciśnięciu przycisku start (NO) słowo W200 przyjmie wartość:
{kind=link}
Answer
-
#000D
-
#0001
-
#000C
-
#0003
Question 90
Question
Po naciśnięciu przycisku START i puszczeniu go
{kind=link}
Answer
-
A. Lamp 1 ustawi się po 25 sekundach na stałe
-
B. Lamp 1 ustawi się po 2.5 sekundach na stałe
-
C. Lamp 1 ustawi się po 2.5 i zgaśnie po jednym cyklu programu
-
Nic się nie stanie
Want to create your own Quizzes for free with GoConqr? Learn more.