1520263
Beschreibung
Mindmap von Konnie Gutierrez, aktualisiert more than 1 year ago
|
|
Erstellt von Konnie Gutierrez
vor etwa 10 Jahre
|
|
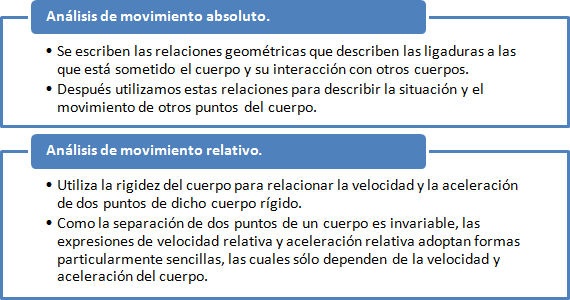
Análisis del Movimiento Absoluto
- Un movimiento se llama absoluto y eterno, cuando lo referimos a un punto que está quieto. Es
aquel movimiento que existe con independencia de cualquier relación o comparación,como la masa
de un cuerpo, que es un valor absoluto porque no depende del lugar en que esté situado.
- A efectos prácticos, podemos distinguir dos modalidades de movimiento relativo: Movimiento
relativo entre dos partículas en un mismo referencial. Movimiento relativo de una partícula en dos
referenciales diferentes en movimiento relativo entre sí.
- Movimiento relativo entre dos partículas en un mismo referencial
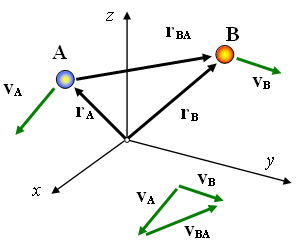
- Consideremos dos partículas, A y B, que se mueven en el espacio y sean rA y rB sus vectores de posición
con respecto al origen O de un referencial dado. Las velocidades de A y B medidas en ese referencial serán
- Los vectores de posición (relativa) de la partícula B con respecto a la A y de la A con respecto a la B
están definidos, y las velocidades (relativas) de B con respecto a A y
de A con respecto a B son
- y las velocidades (relativas) de B con respecto a A y de A con respecto a B son
vBA=drBAdtvAB=drABdt Puesto que rBA=−rAB, también resulta que vBA=−vAB, de modo que las
velocidades relativas de B con respecto a A y de A con respecto a B son iguales y opuestas.
Efectuando las derivadas (3), resulta (4)drBAdt=drBdt−drAdtdrABdt=drAdt−drBdt o sea que
vBA=vB−vAvAB=vA−vB de modo que obtendremos la velocidad relativa entre las dos partículas
restando vectorialmente sus velocidades con respecto a un mismo referencial (Oxyz en la figura).
Derivando de nuevo las expresiones (5) tenemos para las aceleraciones relativas
dvBAdt=dvBdt−dvAdtdvABdt=dvAdt−dvBdt Los primeros miembros de (6) son las aceleraciones
relativas de B con respecto a A y de A con respecto a B. Los otros términos son las aceleraciones de A
y de B con respecto a un mismo observador Oxyz. Tenemos (7)aBA=aB−aAaAB=aA−aB siguiéndose
para las aceleraciones relativas la misma regla que para las velocidades.
- y las velocidades (relativas) de B con respecto a A y de A con respecto a B son
vBA=drBAdtvAB=drABdt Puesto que rBA=−rAB, también resulta que vBA=−vAB, de modo que las
velocidades relativas de B con respecto a A y de A con respecto a B son iguales y opuestas.
Efectuando las derivadas (3), resulta (4)drBAdt=drBdt−drAdtdrABdt=drAdt−drBdt o sea que
vBA=vB−vAvAB=vA−vB de modo que obtendremos la velocidad relativa entre las dos partículas
restando vectorialmente sus velocidades con respecto a un mismo referencial (Oxyz en la figura).
Derivando de nuevo las expresiones (5) tenemos para las aceleraciones relativas
dvBAdt=dvBdt−dvAdtdvABdt=dvAdt−dvBdt Los primeros miembros de (6) son las aceleraciones
relativas de B con respecto a A y de A con respecto a B. Los otros términos son las aceleraciones de A
y de B con respecto a un mismo observador Oxyz. Tenemos (7)aBA=aB−aAaAB=aA−aB siguiéndose
para las aceleraciones relativas la misma regla que para las velocidades.
- Los vectores de posición (relativa) de la partícula B con respecto a la A y de la A con respecto a la B
están definidos, y las velocidades (relativas) de B con respecto a A y
de A con respecto a B son
- Consideremos dos partículas, A y B, que se mueven en el espacio y sean rA y rB sus vectores de posición
con respecto al origen O de un referencial dado. Las velocidades de A y B medidas en ese referencial serán
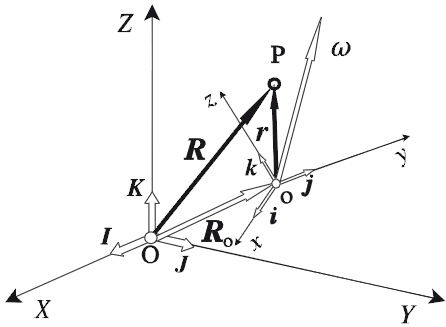
- Movimiento relativo de una partícula en dos referenciales
- En este caso, el movimiento relativo hace referencia al que presenta una partícula con respecto a un
sistema de referencia (xyz), llamado referencial relativo o móvil por estar en movimiento con
respecto a otro sistema de referencia (XYZ) considerado como referencial absoluto o fijo. El
movimiento de un referencial respecto al otro puede ser una traslación, una rotación o una
combinación de ambas (movimiento rototraslatorio).
- En este caso, el movimiento relativo hace referencia al que presenta una partícula con respecto a un
sistema de referencia (xyz), llamado referencial relativo o móvil por estar en movimiento con
respecto a otro sistema de referencia (XYZ) considerado como referencial absoluto o fijo. El
movimiento de un referencial respecto al otro puede ser una traslación, una rotación o una
combinación de ambas (movimiento rototraslatorio).
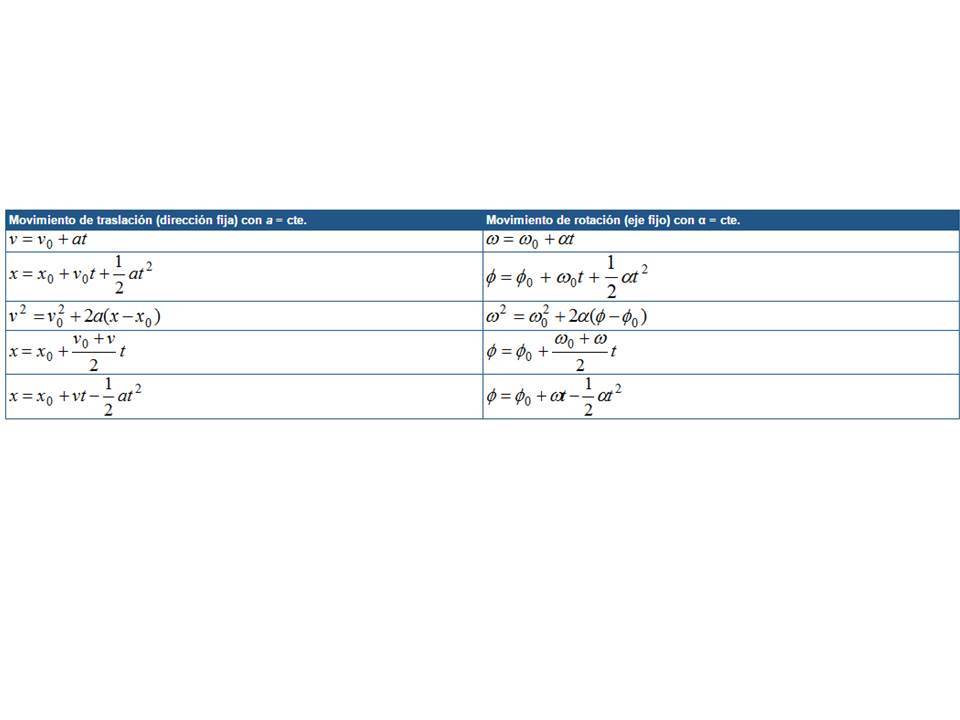
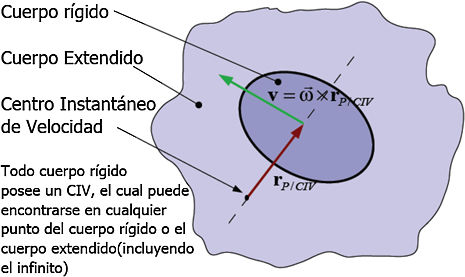
- En un movimiento plano cualquiera de un cuerpo rígido, ninguno de sus puntos está fijo a lo largo del
tiempo. Sin embargo en cada instante se puede hallar un punto donde su velocidad sea nula. Una vez
localizado este centro instantáneo, la velocidad de cualquier otro punto del cuerpo se podrá encontrar
utilizando la ecuación de velocidad relativa. En particular algunos mecanismos están conectados mediante
pasadores que se deslizan sobre ranuras o guías. El movimiento relativo se especifica convenientemente
dando los movimientos de traslación y rotación del miembro que contiene la ranura, la forma de esta y la
velocidad del recorrido del pasador a lo largo de dicha ranura.
- Centro instantáneo de velocidades La velocidad de cualquier punto ubicado sobre un cuerpo rígido
puede obtenerse de una manera muy directa si se elige el punto base A como un punto que tiene
velocidad cero en el instante considerado. En este caso VA= 0 y por tanto la ecuación de velocidad es:
Para un cuerpo con movimiento plano general el punto seleccionado de esta manera, se le llama
centro instantáneo de velocidad (CI) y se encuentra sobre el eje instantáneo de velocidad cero. Este
eje es siempre perpendicular al plano de movimiento y la intersección del eje con este plano define la
ubicación del CI. La magnitud de VB es simplemente Donde:
- Una manera general de analizar un movimiento tridimensional es ubicar un marco . En el cual el
cuerpo requiere un eje de referencia en los que se va a determinar los movimiento de dos
puntos Y que se encuentran separados en un mecanismo para definir el movimiento relativo de
dos partículas que se mueven a lo largo de una trayectoria en rotación .
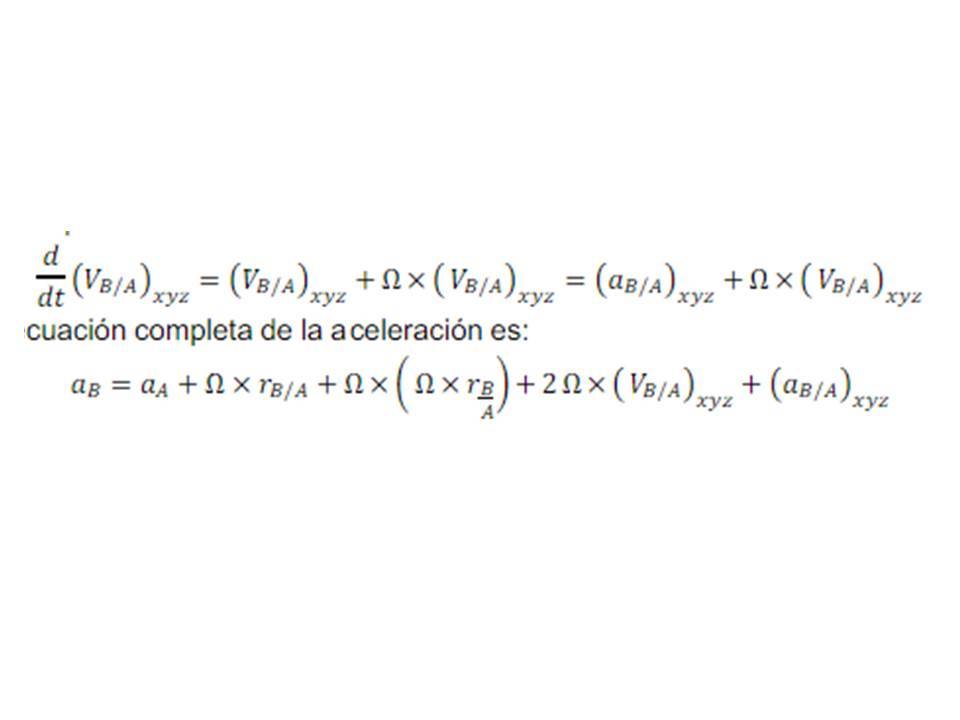
- Aceleración.- así como se determinó la velocidad mediante la derivada de la posición para obtener la
aceleración tenemos que derivar la velocidad.
Medienanhänge
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Möchten Sie kostenlos Ihre eigenen Mindmaps mit GoConqr erstellen? Mehr erfahren.