21651668
Beschreibung
Mindmap von LUIS GABRIEL AGUILAR OLAYA, aktualisiert more than 1 year ago
|
|
Erstellt von LUIS GABRIEL AGUILAR OLAYA
vor mehr als 4 Jahre
|
|
ANALISIS DE
ESTRUCTURAS
- VIGAS Y ARMADURAS
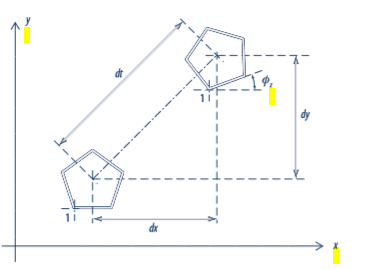
- Grados de libertad
- 3 grados de
libertad:
Desplazamientos
en X, dirección
en Y y giros en Z
- 3 grados de
libertad:
Desplazamientos
en X, dirección
en Y y giros en Z
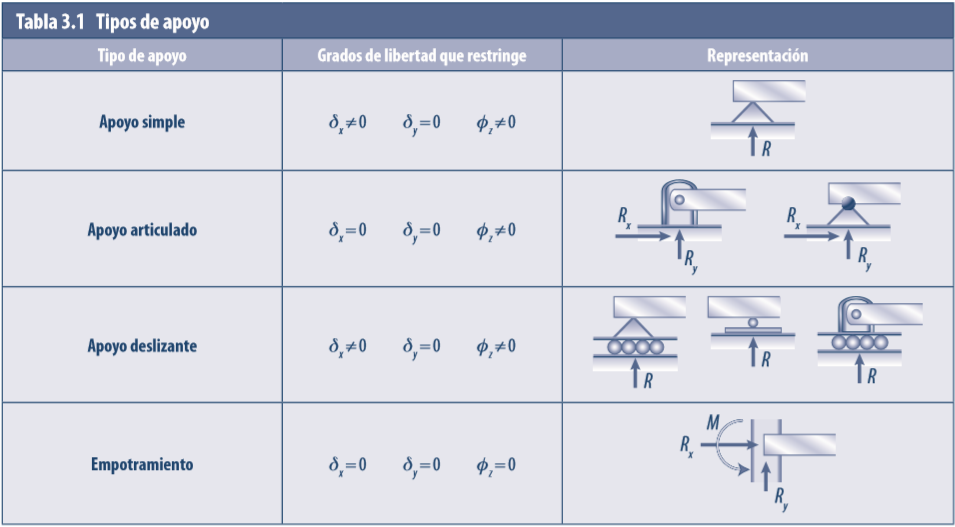
- Tipos de apoyo
- Simple
- Articulado
- Deslizante
- Empotramiento
- Simple
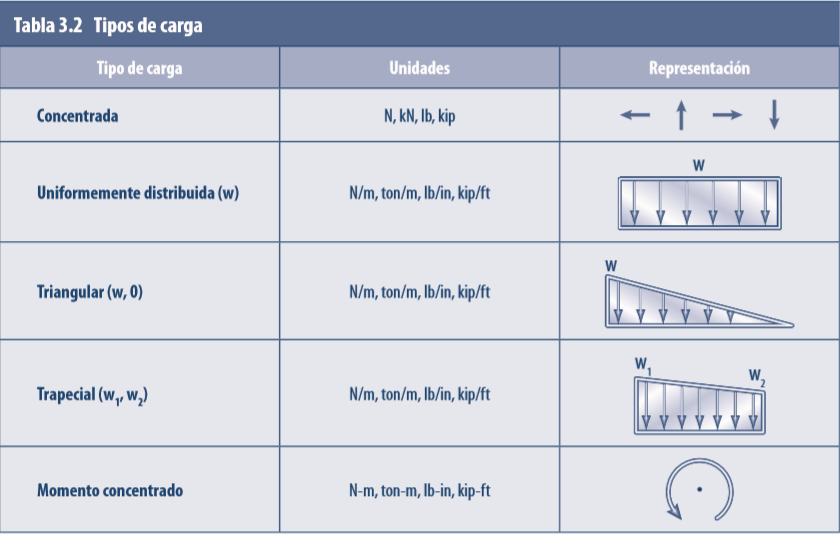
- Tipos de carga
- Concentrada
- Uniformemente distrbuida
- Triangular
- Trapecial
- Momento Concetrado
- Concentrada
- Clasificación de estructuras
- Isostática: Compatiible y
determinado. Esta en equilibrio
- Hipostática: Incompatible
No hay estabilidad
- Hiperistática: Compatible e indeterminado,
numero infinito de soluciones
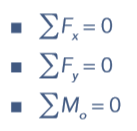
- Ecuaciones de equilibrio
- Isostática: Compatiible y
determinado. Esta en equilibrio
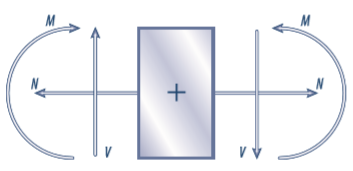
- Elementos mecánicos
- Fuerzas internas
- Momento flexionante (M)
- Fuerza Cortante (V)
- Fuerza Normal (N)
- Momento flexionante (M)
- Fuerzas internas
- Convencion de signos
- Tensión
- Compresión
- Tensión
- Vigas
- Elementos estructurales cuya función es
soportar una gran diversidad de cargas,
con diferentes condiciones de apoyo
- Metodos para graficar elementos mecanicos
- De las secciones
- De las areas
- De las secciones
- Metodos para graficar elementos mecanicos
- Elementos estructurales cuya función es
soportar una gran diversidad de cargas,
con diferentes condiciones de apoyo
- Vigas Gerber
- Elementos estructurales donde puede
haber hundimientos por los diferentes
tipos de suelos, estas vigas son de
menos rigidez
- Isostaticos
- Hiperistaticos
- Isostaticos
- Elementos estructurales donde puede
haber hundimientos por los diferentes
tipos de suelos, estas vigas son de
menos rigidez
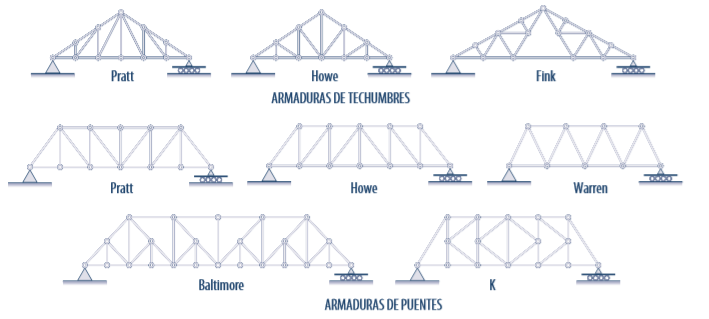
- Tipos y caracteristicas de armaduras
- Techumbres
- Pratt
- Howe
- Fink
- Fink
- Howe
- Pratt
- Puentes
- Pratt
- Howe
- Warren
- Warren
- Howe
- Baltimorre
- K
- Pratt
- Metodo de los nodos
- Metodo de las secciones
- Techumbres
- Grados de libertad
- CENTROIDES, MOMENTOS DE
INERCIA Y FRICCIÓN
- Centro de gravedad
- Todos los cuerpos rigidos poseen
un peso de acuerdo al volumen y el
material. Su vector apunta hacia el
centro de la tierra debido a la
fuerza d egravedad. la suma de los
3 momentos alrededor de los ejes
es igual a Cero
- Todos los cuerpos rigidos poseen
un peso de acuerdo al volumen y el
material. Su vector apunta hacia el
centro de la tierra debido a la
fuerza d egravedad. la suma de los
3 momentos alrededor de los ejes
es igual a Cero
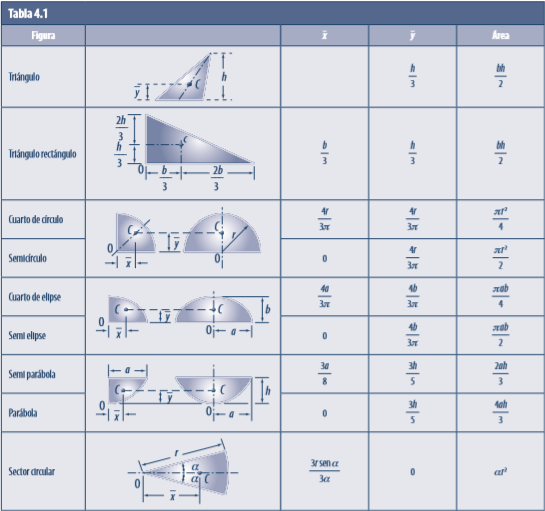
- Centroides de áreas
- Momento de inercia de un area
- Primero. Cuanto
mayor es la masa de
un objeto, más difícil
es ponerlo en rotación
o bien detener su
rotación alrededor de
un eje
- Segundo. El momento de
inercia depende de la
distribución de la masa
del cuerpo rígido. Cuanto
mayor es la distancia del
centroide de la masa al
eje, mayor será su
momento de inercia.
- Expresión
- Expresión
- Segundo. El momento de
inercia depende de la
distribución de la masa
del cuerpo rígido. Cuanto
mayor es la distancia del
centroide de la masa al
eje, mayor será su
momento de inercia.
- Unidades
de
medida
- Primero. Cuanto
mayor es la masa de
un objeto, más difícil
es ponerlo en rotación
o bien detener su
rotación alrededor de
un eje
- Teorema de Steiner o de
ejes paralelos
- Transportar el momento de
inercia de un área con
respecto a un eje que pasa por
su centroide hacia un eje
paralelo arbitrario
- Transportar el momento de
inercia de un área con
respecto a un eje que pasa por
su centroide hacia un eje
paralelo arbitrario
- Momento polar de inercia
- Se utiliza normalmente en los
problemas con la torsión de ejes de
sección transversal circular y
rotación de cuerpos rigidos
- Se utiliza normalmente en los
problemas con la torsión de ejes de
sección transversal circular y
rotación de cuerpos rigidos
- Producto de inercia
- integrar el producto de cada
diferencial de área por las
distancias normales x y y del
centroide del área a los ejes
coordenados centroidales.
- integrar el producto de cada
diferencial de área por las
distancias normales x y y del
centroide del área a los ejes
coordenados centroidales.
- Radio de un giro
en un area
- Distancia normal del eje al
centroide, elevada al cuadrado
y ultiplicada por el area
- Distancia normal del eje al
centroide, elevada al cuadrado
y ultiplicada por el area
- Modulo de sección
- cociente entre el momento de
inercia y la distancia del
centroide a la fibra más
alejada en el eje x o en el eje
- cociente entre el momento de
inercia y la distancia del
centroide a la fibra más
alejada en el eje x o en el eje
- Centro de gravedad
- LUIS GABRIEL AGUILAR
Medienanhänge
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Möchten Sie kostenlos Ihre eigenen Mindmaps mit GoConqr erstellen? Mehr erfahren.