6474236
Beschreibung
Mindmap von Susana Valencia, aktualisiert more than 1 year ago
|
|
Erstellt von Susana Valencia
vor etwa 8 Jahre
|
|
Microcontroladores PIC 18F4550
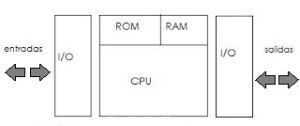
- Es un circuito integrado que en su interior contiene una unidad central de
procesamiento (CPU), unidades de memoria (RAM y ROM), puertos de entrada/salida y periféricos.
- Son dispositivos que operan uno o mas procesos, están basados en la arquitectura de Harvard, la cual consiste en dispositivos de almacenamiento
separados (memoria de programa y memoria de datos).
- Arquitecturas:
- Arquitecura Von Neumann: la unidad central de proceso, o CPU, esta conectada a una memoria
única que contiene las instrucciones del programa y los datos. El tamaño de la unidad de datos o
instrucciones esta fijado por el ancho del bus de la memoria.
- Características:
- - Longitud de las instrucciones esta limitada por la unidad de longitud de los datos, por lo tanto el
microprocesador debe hacer varios accesos a memoria para buscar instrucciones complejas.
- - Velocidad de operación está limitada por el efecto de cuello de botella que significa un bus único para datos e
instrucciones que impide superponer ambos tiempos de acceso
- - Permite el diseño de programas con código automodificable
- - Longitud de las instrucciones esta limitada por la unidad de longitud de los datos, por lo tanto el
microprocesador debe hacer varios accesos a memoria para buscar instrucciones complejas.
- Características:
- Arquitectura Harvard: consiste simplemente en un esquema en el que el CPU esta conectado a dos
memorias por intermedio de dos buses separados. Una de las memorias contiene solamente las
instrucciones del programa, y es llamada Memoria de Programa. La otra memoria solo almacena los
datos y es llamada Memoria de Datos. Ambos buses son totalmente independientes y pueden ser de
distintos anchos.
- Características:
- - Como los buses son independientes, el CPU puede estar accediendo a los datos para completar la
ejecución de una instrucción, y al mismo tiempo estar leyendo la próxima instrucción a ejecutar.
- - El tiempo de acceso a las instrucciones puede superponerse con el de los datos, logrando una mayor
velocidad de operación.
- - Deben poseer instrucciones especiales para acceder a tablas de valores constantes que pueda ser
necesario incluir en los programas
- - Como los buses son independientes, el CPU puede estar accediendo a los datos para completar la
ejecución de una instrucción, y al mismo tiempo estar leyendo la próxima instrucción a ejecutar.
- Características:
- Arquitecura Von Neumann: la unidad central de proceso, o CPU, esta conectada a una memoria
única que contiene las instrucciones del programa y los datos. El tamaño de la unidad de datos o
instrucciones esta fijado por el ancho del bus de la memoria.
- Arquitectura interna de un microcontrolador
- CPU: es el núcleo del microcontrolador, se encarga de ejecutar las instrucciones almacenadas en la
memoria.
- Memoria: se emplean para almacenar información durante un periodo determinado de tiempo, la
información que necesitaremos durante la ejecución del programa que consta del propio
código, y de los diferentes datos usados durante su ejecución.
- Unidades de entrada/salida: son los sistemas que emplea el microcontrolador para comunicarse con
el exterior
- CPU: es el núcleo del microcontrolador, se encarga de ejecutar las instrucciones almacenadas en la
memoria.
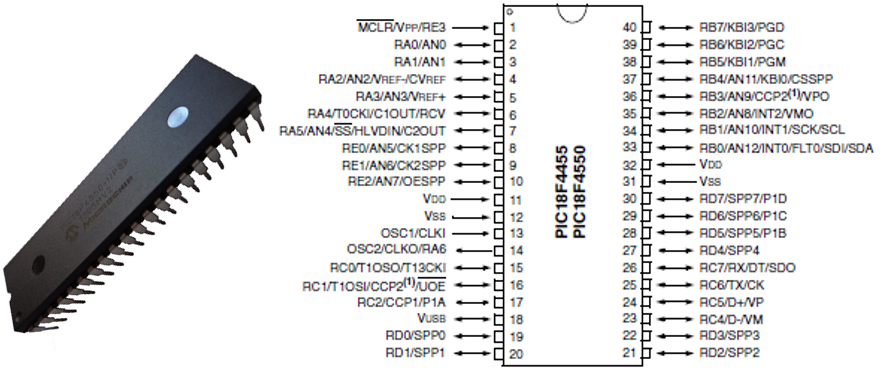
- PIC18F4550
- El microcontrolador PIC18F4550 es un poderoso microcontrolador de la
familia PIC18F, es ideal para aplicaciones de bajo voltaje.
- Contiene los siguientes protocolos de comunicación:
USB, I2C, SPI, EUSART, LIN serial port
- Características:
- - 1kB de memoria de doble acceso vía USB - 35 pines I/O
disponibles - Memoria de programa flash de 32 kB - RAM de
2048 Bytes - EEPROM de datos de 256 Bytes - Velocidad de la
CPU 12 MIPS
- - Oscilador externo de dos modos hasta 48 MHz - Oscilador interno selecionable entre 8 frecuencias
desde 31kHz hasta 8MHz - Oscilador secundario con Timer 1 de hasta 32kHz - Opciones de oscilador
dual permiten que la velocidad de la CPU y del módulo USB sean diferentes
- - ADC de 10 bits y 13 canales - Tecnología nanoWatt que brinda características y funciones de bajo
consumo y ahorro de energía - Voltaje de operación 4.2V a 5.5V - 4 Timer(desde Timer0 a Timer3). Uno
de 8 bits y 3 de 16 bits - 2 módulos de captura/comparación/PWM
- - EUSART, SPP, SPI, I²C. - 20 fuentes de interrupciones (3 externas) - Resistencias de pull-ups en el puerto
B programables - Función del pin MCLR opcional - Brown-out Reset de valor programable - Power-on
Reset
- - Power-up Timer y Oscillator Start-up Timer - Soporta 100,000 ciclos de borrado/escritura en memoria
flash - Soporta 1,000,000 ciclos de borrado/escritura en memoria EEPROM - Retención de datos mayor a
40 años - Protección de código y datos programable - Encapsulado DIP de 40 pines
- - 1kB de memoria de doble acceso vía USB - 35 pines I/O
disponibles - Memoria de programa flash de 32 kB - RAM de
2048 Bytes - EEPROM de datos de 256 Bytes - Velocidad de la
CPU 12 MIPS
- Distribución de pines
- Manejo de puertos
- El compilador ofrece funciones predefinidas
que ayudan a trabajar con los puertos, para
lo cual se utilizan comandos predefinidos
- El compilador ofrece funciones predefinidas
que ayudan a trabajar con los puertos, para
lo cual se utilizan comandos predefinidos
- Manejo de puertos
- El microcontrolador PIC18F4550 es un poderoso microcontrolador de la
familia PIC18F, es ideal para aplicaciones de bajo voltaje.
Medienanhänge
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Möchten Sie kostenlos Ihre eigenen Mindmaps mit GoConqr erstellen? Mehr erfahren.