16484831
Beschreibung
Quiz von MOISES DIEZ, aktualisiert more than 1 year ago
|
|
Erstellt von MOISES DIEZ
vor fast 6 Jahre
|
|
Frage 1
Frage
Partes de un ROBOT.
Antworten
-
Aparato robot, pinza o herramienta y sistema de gestión.
-
Aparato industrial, pinza o herramienta y sistema de gestión.
-
Aparato robot, pinza o herramienta y sistema de control.
-
Aparato robot, pinza o herramienta y sistema de regulador.
Frage 2
Frage
¿Cómo se llaman las partes rígidas de un aparato robot (brazo)?
Antworten
-
escalones.
-
eslabones.
-
articulaciones.
-
reguladores.
Frage 3
Frage
¿Cómo se mueven los eslabones?
Antworten
-
Sistema de accionamiento eléctrico.
-
Sistema de accionamiento hidráulico.
-
Sistema de accionamiento Neumático.
-
Ninguna de las anteriores.
Frage 4
Frage
¿Quién es el cerebro del Robot?
Antworten
-
Sistema de Gestión.
-
Sistema robot.
-
Sistema de Control.
-
Movimiento de control.
Frage 5
Frage
¿Qué es el grado de libertad (GDL)?
Antworten
-
Al número de movimientos independientes que puede realizar cada articulación respecto a la anterior.
-
Coincide con el número de articulaciones de las que se compone un robot.
-
Núemro de eslabones de un robot.
-
a y b son correctas.
Frage 6
Frage
Si una máquina automática tiene menos de tres ejes ¿ se considera un ROBOT?.
Antworten
-
Si
-
Si, pero se considera casi robot.
-
No, debe terer cuatro como máximo.
-
No, debe tener tres o más ejes.
Frage 7
Frage
Características de un robot industrial. Sólo enumerarlas.
Antworten
-
Grados de libertad, volumen de trabajo, capacidad de carga ,resolución, presición y repetibilidad y Velocidad y aceleración.
-
Grados de libertad, volumen de trabajo, capacidad de carga ,resolución y presición y repetibilidad.
-
Grados de libertad, volumen de trabajo y capacidad de carga
-
Grados de libertad, capacidad de carga ,resolución y presición y repetibilidad.
Frage 8
Frage
¿Qué es la resolución de un ROBOT?
Antworten
-
Es la distancia entre el punto programado y el punto realmente alcanzado.
-
Es la capacidad del robot de alcazar siempre el mismo punto en una serie de movimientos repetidos, aunque o sea el punto programado.
-
Velocidad en cada ejes.
-
La mínima variación o incremento que puede proporcionar un robot entre su posición actual y la siguiente.
Frage 9
Frage
¿Qué es la PRECISIÓN de un ROBOT?
Antworten
-
Variación o increneto que puede proporcionar un robot entre su posición actual y la siguiente
-
La distacia entre el punto proprogramado y el punto realmente alcanzado pro el robot.
-
mide la capacidad del robot de alcanzar siempre el mismo punto en una serie de movimientos repetitivos, aunque este no seal el punto programado.
-
ninguna de las anteriores.
Frage 10
Frage
¿Qué es la REPETIBILIDAD de un ROBOT?
Antworten
-
Variación o increneto que puede proporcionar un robot entre su posición actual y la siguiente
-
La distacia entre el punto proprogramado y el punto realmente alcanzado pro el robot.
-
mide la capacidad del robot de alcanzar siempre el mismo punto en una serie de movimientos repetitivos, aunque este no seal el punto
-
La mínima variación o incremento que puede proporcionar un robot entre su posición actual y la siguiente.
Frage 11
Frage
¿Qué es la VELOCIDAD Y ACELERACION de un ROBOT?
Antworten
-
Es la distancia entre el punto programado y el punto realmente alcanzado.
-
Es la capacidad del robot de alcazar siempre el mismo punto en una serie de movimientos repetidos, aunque o sea el punto programado.
-
Velocidad en cada ejes.
-
La mínima variación o incremento que puede proporcionar un robot entre su posición actual y la siguiente.
Frage 12
Frage
Tipos de ROBOTS industriales.
Antworten
-
Cartesianos, cilíndricos. esféricos, brazo rígido y angulares o antropomorficos
-
Cartesianos, cilíndricos. circulares, brazo oscilante (o SCARA) y angulares o antropomorficos.
-
Lineales, cilíndricos. esféricos, brazo oscilante (o SCARA) y angulares o antropomorficos.
-
Cartesianos, cilíndricos. esféricos, brazo oscilante (o SCARA) y angulares o antropomorficos.
Frage 13
Frage
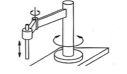
¿Cuantos grados de libertad tiene este ROBOT?
{kind=link}
Antworten
-
5
-
6
-
7
-
2
Frage 14
Frage
¿Cuál es el ROBOT más utilizado?
Antworten
-
Cartesiano.
-
cilíndrico.
-
antropomorfico.
-
SCARA.
Frage 15
Frage
¿Cómo se llaman los ROBOTS que tienen tres ejes principales dotados con movimiento rectilíneo?
Antworten
-
Antropomorfico
-
Cartesiano.
-
SCARA
-
Cesférico.
Frage 16
Frage
¿Cómo se llaman los ROBOTS que tienen dos ejes con movimiento lineal y un tercero con movimiento de rotación?
Antworten
-
Esférico.
-
Cilíndrico.
-
SCARA.
-
Cartesiano.
Frage 17
Frage
¿Cómo se llaman los ROBOTS que tienen dos ejes con movimiento de rotación perpendiculares entre sí y un tercero con movimiento lineal?
Antworten
-
Antropomórfico.
-
Cilíndrico.
-
Esférico o polares.
-
SCADA.
Frage 18
Frage
¿Cómo se llaman los ROBOTS que dotados de un brazo acodado para montaje. Disponen de dos ejes con movimiento de rotación y un tercero con movimiento lineal?
Antworten
-
Brazo oscilante.
-
Cilíndricos.
-
Esférico.
-
Antropomórfico.
Frage 19
Frage
¿Qué diferencia hay entre u robot esférico y otro de brazo oscilante?
Antworten
-
El oscilante tiene ángulos perpendiculares y el esférico no.
-
El oscilante tiene el brazo acodado y el esferico tiene antulos perpendiculares.
-
Son igulaes.
-
Ninguna de las anteriores son correctas.
Frage 20
Frage
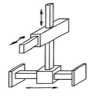
19. ¿Qué tipo de robot es?
{kind=link}
Antworten
-
Cilíndrico.
-
SCARA.
-
Antropomórfico.
-
Cartesiano.
Frage 21
Frage
¿Qué tipo de robot es?
{kind=link}
Antworten
-
Cilíndrioco.
-
Antropomórfico.
-
Cartesiano.
-
Esférico.
Frage 22
Frage
19. ¿Qué tipo de robot es?
{kind=link}
Antworten
-
Cartesiano.
-
Cilíndrico.
-
Esférico
-
Scara.
Frage 23
Frage
19. ¿Qué tipo de robot es?
{kind=link}
Antworten
-
Cartesiano.
-
Cilíndrico.
-
Esférico.
-
Antropomórfico.
Frage 24
Frage
¿Cuántos servomotores hay en un Robot?
Antworten
-
Tantos como eslabones tenga el robot
-
Menos de tres.
-
Tantos como grados de libertad.
-
Según los sensores.
Frage 25
Frage
Partes de un servomotor.
Antworten
-
Eslabones, freno y motores.
-
Motor, grados de libertad y Sensor.
-
Motor, freno y Sensor de posición/estacionamiento.
-
Motor, freno y Sensor de posición/velocidad.
Frage 26
Frage
¿Qué motores son los más utilizados en los Robots industriales?
Antworten
-
Circulares.
-
SCARA.
-
Antropomórficos.
-
Esféricos.
Frage 27
Frage
¿Por qué no se utilizan los motores asíncronos de C.A.?
Antworten
-
Proporciona mayor potencia a igualdad de peso que los de CC sin escobilla.
-
Proporciona menor potencia a igualdad de peso que los de CC sin escobilla.
-
Proporciona mayor potencia a igualdad de velocidad que los de CC sin escobilla.
-
Ninguna de los anteriores.
Frage 28
Frage
¿En qué consiste el sistema de trasmisión indirecta de potencia en los motores síncronos de C.A.?
Antworten
-
Permite aumentar la velodicdad de giro de salida (movimientos más rápidos) y alcanzar menor par motor.
-
Permite reducir la velodicdad de giro de salida (movimientos más rápidos) y alcanzar mayor par motor.
-
Permite reducir la velodicdad de giro de salida (movimientos más lentos) y alcanzar mayor par motor.
-
Permite reducir la velodicdad de giro de salida (movimientos más lentos) y alcanzar menor par motor.
Frage 29
Frage
¿Qué tipo de sistema utiliza los sensores de posición y velocidad?
Antworten
-
Lazo abierto y lazo cerrado.
-
Lazo abierto y lazo continuo.
-
Lazo abierto y Lazo discontinuo.
-
Lazo no alimentado y lazo cerrado.
Frage 30
Frage
Tipos de sensores de posición y velocidad.
Antworten
-
Revolver y encoder.
-
Encoders y resolvers
-
Encoders y revolvers.
-
Ninguno de los anteriores.
Frage 31
Frage
Tipos de encoders.
Antworten
-
Unico o incremental.
-
absoluto o incremental.
-
absoluto o decremental.
-
unico o decremental.
Frage 32
Frage
¿De que consta los encoders óptico rotativo.?
Antworten
-
un disco óptico transparente, en el que le han grabado ciertas zonas opacas y un emisor-receptor de luz fija.
-
un disco óptico transparente, en el que le han grabado ciertas zonas opacas y un emisor-receptor de luz intermitente.
-
un disco óptico opaca, en el que le han grabado ciertas zonas transparente y un emisor-receptor de luz fija.
-
un disco óptico opaca, en el que le han grabado ciertas zonas opacas y un emisor-receptor de luz intermitente.
Frage 33
Frage
Funcionamiento de los resolvers.
Antworten
-
Compuestas por dos bobinas eléctricas; una de ellas está en el rotor, y excita a la otra desfasadas que está montadas en el estator.
-
Compuestas por cuatro bobinas eléctricas; dos de ellas está en el rotor, y excita a otras dos desfasadas que está montadas en el estator.
-
Compuestas por tres bobinas eléctricas; una de ellas está en el rotor, y excita a otras dos desfasadas que está montadas en el estator.
-
Compuestas por tres bobinas neumáticas; una de ellas está en el rotor, y excita a otras dos desfasadas que está montadas en el estator.
Frage 34
Frage
¿Cuál es la función del freno en los robots industriales?
Antworten
-
Que el servomotor se detenga en un punto concreto, y no se mueva de dicho punto hasta que los encoders lo decida.
-
Que el servomotor se detenga en un punto concreto, y no se mueva de dicho punto hasta que los resolvers lo decida.
-
Que el servomotor se detenga en un punto concreto, y no se mueva de dicho punto hasta que los el servomotor lo decida lo decida.
-
Que el servomotor se detenga en un punto concreto, y no se mueva de dicho punto hasta que la undidad de control lo decida.
Frage 35
Frage
Si se produce un corte de energía ¿cómo actúa el freno del servo?
Antworten
-
Sigue funcionando y se detiene con la inercia.
-
El freno se activa y el rotor no gira.
-
El freno se activa y el estator no gira.
-
El freno se desactiva y el rotor no gira.
Frage 36
Frage
Si en el freno se aplica tensión en la bobina ¿qué genera?
Antworten
-
No pasa nada.
-
Se activa el freno.
-
Se desactiva el freno.
-
Ninguna de las anterirores.
Frage 37
Frage
¿Qué es la unidad de control.?
Antworten
-
El brazo del robot.
-
La articulación del robot.
-
El cerebro del robot.
-
ninguna de las anteriores.
Frage 38
Frage
35. ¿Qué nos encontramos en el interior de la unidad de control?
Antworten
-
El módulo de control.
-
El módulo de accionamiento.
-
El módulo de contro y el de frenado.
-
a y b son correctas.
Frage 39
Frage
¿Qué módulo del interior de la unidad de control contiene elementos eléctricos y electrónicos que alimenta y controlan los servos?
Antworten
-
Ordenador principal.
-
Tarjetas de comunicación.
-
Unidad de almacenamiento.
-
Todas son correctas.
Frage 40
Frage
¿Qué nos encontramos en el módulo de control de la unidad de control?
Antworten
-
Todos los elementos hidráulicos y neumáticos que alimentan y controlan los distintos servomotres del robot.
-
Todos los elementos neumáticos que alimentan y controlan los distintos servomotres del robot.
-
Todos los elementos eléctricos y electrónicos que alimentan y controlan los distintos servomotres del robot.
-
Todos los elementos hidráulicos que alimentan y controlan los distintos servomotres del robot.
Frage 41
Frage
¿Dónde cargamos los programas que luego son interpretados y convertidos en órdenes que son ejecutados por el módulo de accionamiento?
Antworten
-
En el módulo de control.
-
En el módulo de accionamiento.
-
En el módulo de direccionamieto.
-
En el módulo de instrucciones.
Frage 42
Frage
Aplicaciones industriales.
Antworten
-
Manipulación de piezas.
-
Manipulación de sensores.
-
Manipulación de herramientas.
-
a y c son correctas.
Frage 43
Frage
¿Con qué está equipado el ROBOT para la manipulación de las piezas?
Antworten
-
Pinza de soldaduras.
-
Pinzas o ventosas.
-
fresas y brocas.
-
Pistola o instrumentos de medición.
Frage 44
Frage
¿Qué tipo de equipamiento llevaría un ROBOT si pretendemos ensamblar dos piezas o paletizado?
Antworten
-
Pinzas o ventosas
-
Pinza de soldadura.
-
Pistola de pernos para montaje atornillado.
-
ninguna de las anteriores.
Frage 45
Frage
¿Qué nombre recibe las pinzas de un ROBOT?
Antworten
-
encoders
-
resolvers
-
grippers.
-
KUKA
Frage 46
Frage
¿Sobre qué objetos actuaría la ventosa y con qué tipo de circuito debería contar?
Antworten
-
Sobre piezas rugosas y poco porosas.
-
Sobre piezas lisas y muy porosas.
-
Sobre piezas rugosas y muy porosas.
-
Sobre piezas lisas y poco porosas.
Frage 47
Frage
¿Qué tipo de herramientas utilizarías para materiales ferromagnéticos?
Antworten
-
ventosa.
-
elctromagnéticas.
-
electroimanes.
-
pinzas de enganche.
Frage 48
Frage
Tipos de pinzas según los objetos a manipular.
Antworten
-
Si se ejerce presión se utiliza pinzas enganche. Para piezas que no se pueda ejercer presión se utiliza pinzas de lineales y angulares..
-
Si se ejerce presión se utiliza pinzas angulares o lineales. Para piezas que no se pueda ejercer presión se utiliza pinzas de enganche.
-
Si se ejerce presión se utiliza pinzas angulares o enganche. Para piezas que no se pueda ejercer presión se utiliza pinzas de lineales.
-
Si no se ejerce presión se utiliza pinzas angulares o lineales. Para piezas que se pueda ejercer presión se utiliza pinzas de enganche.
Frage 49
Frage
¿Qué tipo de pinzas utilizarías si quieres ejercer presión sobre los objetos?
Antworten
-
Pinzas lineales.
-
Pinzas angulares.
-
Pinzas de enganche.
-
Pinzas electromagnética.
Frage 50
Frage
¿Qué tipo de pinzas utilizarías no si quieres ejercer presión sobre los objetos?
Antworten
-
Plnzas lineales.
-
Plinzas angulares.
-
Pinzas de enganche.
-
a y b son correctas.
Frage 51
Frage
Fabricantes de ROBOTS INDUSTRIALES.
Antworten
-
ABB, FANUC y KUKA.
-
AAB, FANUC y KUKA.
-
ABB, FUNUC y KUKA.
-
ABB, FANUC y KAKU.
Frage 52
Frage
49. ¿Qué estudia la cinemática de un ROBOT?
Antworten
-
El estudio de su posicionamiento con respecto a un sistema de referencia (SR).
-
El estudio de su movimiento con respecto a un sistema de moviminto (MR).
-
El estudio de la velocidad con respecto a un sistema de referencia (SR).
-
El estudio de su movimiento con respecto a un sistema de referencia (SR).
Frage 53
Frage
¿Qué estudia la dinámica de un ROBOT?.
Antworten
-
La realcino entre la velocidad y la aceleración.
-
La relación entre el movimiento de un robot y las causas que lo producen.
-
La relación entre la posición de un robot y las causas que lo producen.
-
La relación entre el moviminot del robot con respecto a su velocidad.
Möchten Sie mit GoConqr kostenlos Ihre eigenen Quiz erstellen? eigenen Mehr erfahren.