4729567
Description
Flashcards by pelsin pelsin, updated more than 1 year ago
|
|
Created by pelsin pelsin
over 8 years ago
|
|
| Question | Answer |
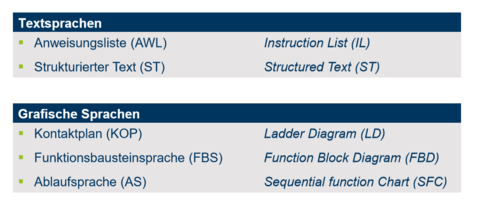
| 1. In welche Gruppen werden die SPS-Programmiersprachen nach IEC 61131 unterteilt? Nennen Sie die jeweiligen Bestandteile dieser Gruppen. Worin unterscheiden sich die einzelnen Programmiersprachen? | |
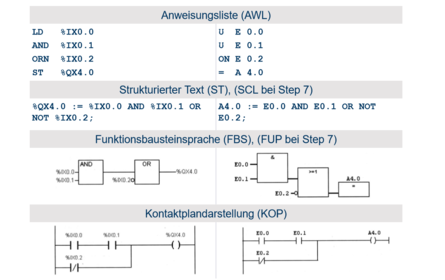
| 2. Stellen Sie UND-, ODER-und NICHT -Funktionen in KOP, FBS, ST und AWL dar | |
| 3. Skizzieren Sie den schematischen Aufbau einer Robotersteuerung | |
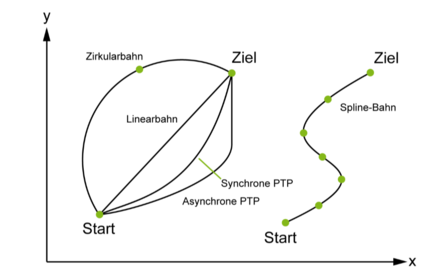
| 4. Nennen Sie die typischen Bewegungsarten bei einer Robotersteuerung. | |
| 5. Welche Betriebsarten existieren bei einer Robotersteuerung? | -Einricht-Betrieb -Test-Betrieb -Automatik-Betrieb -Stand-By |
| 6. Erläutern Sie die Unterschiede zwischen einer SPS und einer Robotersteuerung | SPS -Ursprünglich ereignisorientierte Steuerung von technischen Systemen -Geringere Anschaffungskosten -Kein Teach-In möglich - Kennt nur Achsbewegungen, keine Bahnen |
| 6. | Robotorsteuerung - Entworfen für Positions-und Bahnorientierte Steuerung von Handhabungssystemen -Schnelle, bahngetreue Bewegungen in verschiedenen Geschw. geringere Taktzeit -Sicheres und kollisionsfreies Notverhalten -Besseres Überschleifen |
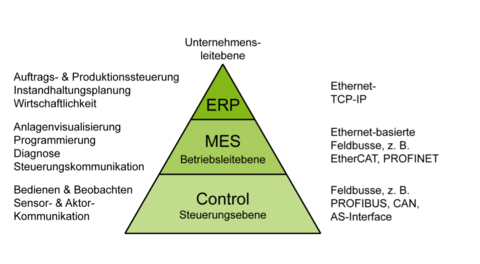
| 7. Welche Feldbussysteme gibt es? | |
| 8. Nennen Sie die Vor-und Nachteile von Feldbussystemen | Vorteile -weniger Verkabelung, kleinere Schaltschränke -geringerer Planungs- u.Installationsaufwand -Höhere Zuverlässigkeit -Schutz vor Störungen gegenüberAnalogwerten -Erweiterungen oder Änderungen sind einfach durchzuführen Nachteile - komplexeres System -höherer Preis |
| 9. Nennen und beschreiben Sie die unterschiedlichen Topologien von Bussystemen | -Linienbus-Topologie -Ring-Topologie -Stern-Topologie -Baum-Topologie -Vermaschte Topologie |
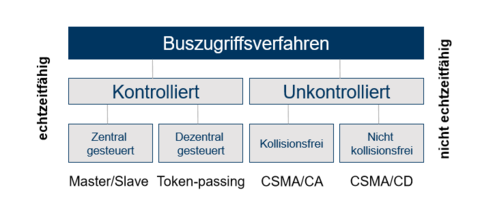
| 10. Was versteht man unter einem Buszugriffsverfahren? Welche Buszugriffsverfahren kennen Sie? Wie werden die einzelnen Zugriffsverfahren unterteilt? | -Bestim. wie ein Teilnehmer Zugriff auf Bus hat -Regulieren die Reihenfolge, in der die Knoten Zugriff auf den Bus haben |
| Buszugriffverfahren | |
| 11. Nennen Sie die Vor-und Nachteile des Master/Slave-Verfahrens | Vorteile - Einfacher Aufbau der Slaves - Festgelegte Übertragungszeit->Echtzeitfähig -Prioritätssteuerung durch Polling-Sequenz |
| 11. Nennen Sie die Vor-und Nachteile des Master/Slave-Verfahrens | Nachteile -Ausfall des Masters blockiert das gesamte System - Übertragug von Slave zu Slave muss immer über den Master erfolgen - Reaktionszeit doppelt so hoch wie Buszykluszeit |
| 12. Nennen Sie die Vor-und Nachteile des Token-Passing-Verfahrens | Vorteile - Direkte Kommunikation der Teilnehmer -Ausfall eines Teilnehmers hält das Netz nicht auf |
| 12. Passing-Verfahrens | Nachteile - Komplexe Bus-Verwaltung - Token-Umlaufzeit erhöht sich mit der Teilnehmerzahl |
| 13. Was versteht man unter CSMA/CD? Nennen Sie die Vor-und Nachteile dieses Verfahrens. | Vorteile - Für viele Teilnehmer geeignet -Hinzufügen oder Entfernen von Teilnehmern einfach Nachteile -Wenig Effizienz im Hochlastbetrieb, da viele Kollisionen - Keine Echtzeitfähigkeit |
| 13 CSMA/CD | Nachteile -Wenig Effizienz im Hochlastbetrieb, da viele Kollisionen - Keine Echtzeitfähigkeit |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Flashcards for free with GoConqr? Learn more.