4381694
Descripción
Test por Recca Flames, actualizado hace más de 1 año
|
|
Creado por Recca Flames
hace casi 9 años
|
|
Pregunta 1
Pregunta
Co należy uwzględnić przy doborze czasu próbkowania realizowanego cyfrowego układu regulacji?
Respuesta
-
Charakterystyki częstotliwościowe
-
czas realizacji algorytmu lub kompensacji
-
dobroć regulacji
-
minimalnofazowość obiektu
Pregunta 2
Pregunta
Jaki jest główny cel stosowania odpornych układów regulacji
Respuesta
-
zmniejszenie wpływu zakłóceń na zmienną regulowaną
-
zmniejszenie wrażliwości układu regulacji na zmianę parametrów obiektu
-
poprawne dobroci układu regulacji
-
wyeliminowanie uchybu statycznego
Pregunta 3
Pregunta
Zaznaczyć najczęściej stosowane standardy wejść i wyjść przetworników A/C i C/A
Respuesta
-
0-20mA
-
0-10V
-
4-20mA
-
-10-10V
Pregunta 4
Pregunta
Czy różnica w realizacji regulatora rozmytego przy wykorzystaniu metodyki Mandaniego i Sugeno wystepuje przy
Respuesta
-
rozmywaniu zmiennych wejściowych
-
wyostrzaniu zmiennych wyjściowych
-
w bazie reguł
-
w bazie wiedzy
Pregunta 5
Pregunta
Jakie są ograniczenia przy zastosowaniu minimalno-czasowcych układów regulacji?
Respuesta
-
minimalnofazowość obiektu
-
ograniczona wartość sygnału sterującego
-
czas próbkowania
-
stabilność układu
Pregunta 6
Pregunta
Jakie działanie regulatora PID można pominąć przy sterowaniu obiektem astatycznym
Respuesta
-
części różniczkującej
-
części całkującej
-
części proporcionalnej
-
podwójnego różniczkowania
Pregunta 7
Pregunta
Jaki jest cel stosowania układu kompensacji automatycznej?
Respuesta
-
eliminacja uchybu statycznego
-
eliminacja zakłócenia
-
zmniejszenie czasu regulacji
-
zmniejszenie przerególowania
Pregunta 8
Pregunta
Podany jest wykres odpowiedzi skokowej 1 i odpowiedzi skokowej 2, oraz jest jeden wykres sygnału sterującego, co zostało zmienione że tak się zmieniła odpowiedź skokowa?
Respuesta
-
wzmocnienie
-
Ograniczenie sygnału sterującego
-
stała różniczkowa
-
coś jeszcze
Pregunta 9
Pregunta
Główne różnice w metodach doboru nastaw regulatorów dyskretnych i regulatorów ciągłych:
Respuesta
-
opracowanie metody można zastosować tylko dla regulatorów PI i PID
-
obowiązują te same metody ale z uwzględnieniem czasu próbkowania
-
nie ma specjalnych metod dla regulatorów dyskretnych
-
nie ma żadnej różnicy
Pregunta 10
Pregunta
Warunkiem koniecznym i wystarczającym stabilności liniowego, stacjonarnego układu dyskretnego jest:
Respuesta
-
aby wszystkie bieguny transmitancji znajdowały się wewnątrz koła jednostkowego
-
aby wszystkie bieguny transmitancji znajdowały się z lewej strony płaszczyzny zespolonej
-
aby wszystkie zera transmitancji znajdowały się wewnątrz koła jednostkowego
-
aby wszystkie bieguny transmitancji znajdowały się poza kołem jednostkowym
Pregunta 11
Pregunta
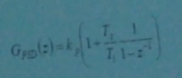
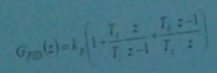
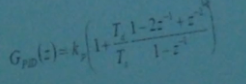
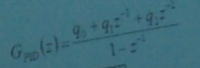
Transmitancja regulatora typu PID
Respuesta
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Pregunta 12
Pregunta
Na schemacie drabinkowym jest zrobiony regulator PID, którą bramkę należy wyłączyć aby pozbyć się efektu wind-up?
Respuesta
-
M0
-
M1
-
M3
-
M4
Pregunta 13
Pregunta
Metoda wyostrzania (defuzyfikacji)
Respuesta
-
środka ciężkości
-
pierwszego maksimum
-
ostatniego maksimum
-
mamdaniego
Pregunta 14
Pregunta
metody przejścia z dziedziny s na dziedzine z
Respuesta
-
ZOH
-
metoda zero pole
-
aproksymacja tustina
-
......................
Pregunta 15
Pregunta
algorytm pozycyjny
Respuesta
-
jest przyrostowy
-
położeniowy
-
określa wartość absolutna
-
określa zmiane wartości sygnału
Pregunta 16
Pregunta
algorytm prędkościowy
Respuesta
-
jest przyrostowy
-
położeniowy
-
określa wartość absolutna
-
określa zmiane wartości sygnału
Pregunta 17
Pregunta
Filtr czybyszewa I
Respuesta
-
zafalowania w przepustowym
-
zaporowy
Pregunta 18
Pregunta
Filtr Bessela charakteryzuje się
Respuesta
-
najbardziej liniowa charakterystyka fazowa
-
bardzo powolny spadek wzmocnienia w pasmie przejściowym
-
stosowany jest gdy ważny jest czasowy przebieg sygnału
-
zafalowana w pasmie zaporowym
Pregunta 19
Pregunta
Który filt charakteryzuje się największą liniowością i bardzo powolnym spadkiem?
Respuesta
-
Czybyszewa I
-
Czybyszewa II
-
Eliptyczny
-
bessela
Pregunta 20
Pregunta
Który z modeli został przedstawiony na rysunku?
Respuesta
-
ARX
-
ARMAX
-
BJ
-
OE
Pregunta 21
Pregunta
jaki jest główny cel stosowania adaptacyjnych układów regulacji
Respuesta
-
zmniejszenie wpływu zakłóceń na zmienną regulowaną
-
zmniejszenie wrażliwości układu regulacji na zmianę parametrów obiektu
-
poprawę dobroci układu regulacji
-
wyeliminowania uchybu statycznego
Pregunta 22
Pregunta
Antyaliasing
Respuesta
-
odpowiedzi warunek nyquista
-
występują składowe o blednej częstotliwości
-
coś z czasem próbkowania
-
???
¿Quieres crear tus propios Tests gratis con GoConqr? Más información.