4287906
Descripción
Fichas por Wojciech Gryncze, actualizado hace más de 1 año
|
|
Creado por Wojciech Gryncze
hace casi 9 años
|
|
| Pregunta | Respuesta |
| Uninformed search vs Informed search | Uninformed search methods have access only to the problem definition. Informed search methods may have access to a heuristic function h(n) that estimates the cost of a solution from n. |
| Best-first search | The generic best-first search algorithm selects a node for expansion according to an evaluation function. |
| Greedy best-first search | Greedy best-first search expands nodes with minimal h(n). It is not optimal but is often efficient. |
| A∗ search | (Combine greedy and uniform-cost) A∗ search expands nodes with minimal f(n) = g(n) + h(n). A∗ is complete and optimal, provided that h(n) is admissible (for TREE-SEARCH) or consistent (for GRAPH-SEARCH). The space complexity of A∗ is still prohibitive. |
| Admissible heuristic? | h(n) is admissible if h(n) never overestimates cost to reach a goal. Consequences: -h(n) is always optimistic - f(n) never overestimates cost of a solution through node n -h(n) = 0 if n is a goal |
| Consistent heuristic | The estimation from a node n to the goal, is lesser than the cost from n to a new node n' with the estimation from the node n' to the goal h(n) ≤ c(n, a, n') + h(n') Consistent heuristic is admissible. |
| Triangle inequality? | Each side of a triangle cannot be longer than the sum of the other two sides. • h(n) : estimated cost between n and G • C(n, a n’) : cost to go in n’ from n with action a • h(n’) : estimated cost between n’ and G |
| A* is Optimal : Proof | A* (using Tree Search) is optimal if h(n) is admissible Proof : • A solution is a path from the initial state to a goal state • Let C* be the lowest path cost among all solutions • We must show that A* will not return a suboptimal path to a goal Part (1) • Let G be a goal node in the fringe, but in a suboptimal path • Its path cost g(G)=C is not the lowest one (C > C*) • f(G) = g(G) + h(G) • h(G) = 0 because G is a goal node and h is admissible • f(G) = g(G) = C > C* • f(G) > C* Part (2) • Let n be a node in the fringe, with n in the path to the optimal solution (cost C* ) • f(n) = g(n) + h(n) • f(n) ≤ C* because h is admissible Part (3) • f(n) ≤ C* < f(G) • Node G will never be selected (end of proof) Consequence • A* expands no nodes with f(n) > C* |
| Properties of consistency? | • If a heuristic is consistent, then it is also admissible • A* (using Graph Search) is optimal if h(n) is consistent |
| Monotonicity of f(n) | If h(n) is consistent (Let a be an action and n,n’ two nodes we have h(n) ≤ c(n, a, n') + h(n')) then f(n) along any path is non decreasing. |
| Properties of A* | • With h(n) consistent, the sequence of nodes expanded by A* using GraphSearch is in non decreasing order of f(n) • A* (using Graph-Search ) is optimal if h(n) is consistent • A* expands all nodes with f(n) < C* • A* expands some (at least one) of the nodes on the C* contour before finding the goal • A* expands no nodes with f(n) > C* |
| A* is optimally efficient? | A* is optimally efficient because he don’t expand node with f(n) > C∗. We can’t be more efficient because if we don’t expand all node with f(n) < C∗ we take the risk of missing the optimal solution! |
| Iterative Deepening A* | We combined the algorithm A* with the Iterative deepening. Let l be a limit. IDA* use f-cost(g+h) as a cutoff rather than the depth. At each iteration, the cutoff-value is the smallest f-cost of any node the exceeded the cutoff on the previous iteration. |
| Recursive Best-First Search | It’s a simple recursive algorithm trying to run in a linear space. The structure is the same than the DFS except it does not keep going down indefinitely. It us a f_limit value variable to keep track of the f-value of the best alternative path from the ancestor of the current node. IDA* and RBFS use to little memory |
| Simple Memory-Bounded A* | SMA* does run as A* until the memory is full. When the memory is full, it need to discard a node if it wants to add a new one. It will discard the worst one (one with highest f-value). SMA* backups the value of the its parent so that the ancestor knows the quality of the best path in that sub tree. |
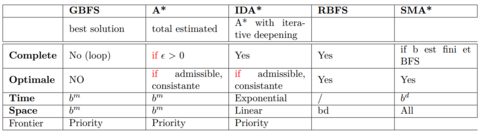
| Informed search comparaison | |
| Designing heurisitic | You must choose an admissible and consistent heuristic. You must choose the most dominant heuristics (The most dominant is the one with the most informations) |
{kind=link}
{kind=link}
¿Quieres crear tus propias Fichas gratiscon GoConqr? Más información.