5968687
Descripción
Fichas por Ruben Weiher, actualizado hace más de 1 año
|
|
Creado por Ruben Weiher
hace más de 8 años
|
|
| Pregunta | Respuesta |
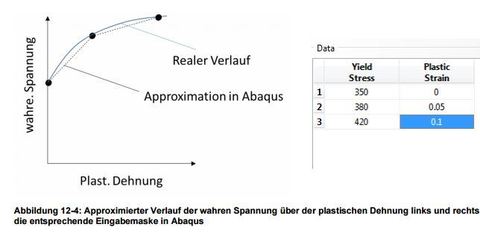
| 1. Wie werden Spannungen in Abaqus eingegeben? | Materialmanager Plastic: Approximation aus Spannungs-Dehnungs-Diagramm Elastic: E-Modul und Querkontraktionszahl |
| 2. Nenne 4 Materialmodelle | 1. Ortsabhängig (z.B. oberflächengehärteter Stahl) 2. Richtungsabhängig (faserverstärkte Werkstoffe) 3. Zeitabhängig (Kriechvorgänge etc.) 4. Hyperelastisch (Gummi) |
| 3. Was ist eine Vergleichsspannung? | Spannung, die aus einem dreiachsigen Spannungszustand auf eine äquivalente, die Belastung wiedergebende Spannung in eine Richtung umgerechnet wird |
| 4. Gib eine Definition der FEM an | Die FEM ist ein numerisches Lösungsverfahren zur Lösung von DGLs Ein Gebiet wird in eine beliebig große ANzahl von finiten Elementen unterteilt, die an den Rändern/Ecken aus Knoten bestehen, an denen die Freiheitsgrade berechnet werden (z.B. Verschiebungen in der Strukturmechanik) |
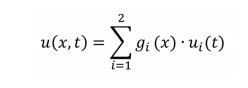
| 5. Was ist der Rayleigh-Ritz-Ansatz und wo wird er angewendet? | Der Rayleigh-Ritz-Ansatz ist eine Linearkombination von orts- und zeitabhängigen Form- bzw. Ansatzfunktionen. Damit kann von den Knotenverschiebungen ui ausgehend in das Innere des Elements u (x,t) hineinapproximiert werden. Die dazu erforderlichen Formfunktionen gi, gj werden linear unabhängig gewählt, und zwar so, dass alle Randbedingungen erfüllt werden. Anwendung z.B. bei linearem Stabelement |
| 6. Was versteht man unter der H-Methode? | Die H-Methode beschreibt die Vorgehensweise, durch Netzverfeinerung bessere Ergebnisse zu erzielen |
| 7. Was versteht man unter der P-Methode? | Die P-Methode strebt ein genaueres Ergebnis durch die Verwendung höherer Polynomgrade (bis zu 9) an |
| 8. Gib die finite Grundgleichung an. Wofür stehen die Buchstaben? | k x u = p k: bekannte, lineare Steifigkeit u: unbekannte Verschiebungen p: bekannte Kräfte |
| 9. Was gilt bei der symmetrischen Matrix? | |
| 10. Beschreibe die allgemeine Vorgehensweise bei einer FEM-Analyse | 1. Prüfung ob 2D möglich/3D notwendig 2. Prüfung auf Symmetrien 3. Zuweisung von Materialeigenschaften 4. Festlegung der Randbedingunen 5. Elementauswahl und Diskretisierung des Bauteils 6. Lösung des Berechnungsauftrags. Anfangs Ermittelung der benötigten Matrizen (Steifigkeit etc.), anschließend Transformation aller Eigenschaften in ein einheitslichen Koordinatensystem, dann Lösung. Es kommen verschiedene Methoden zum Einsatz, von der direkten Lösung linearer Probleme bis hin zum iterativen Lösungsprozess bei Nichtlinearitäten |
| 11. Beschreiben Sie den ebenen Spannungs- und den ebenen Dehnungszustand. Wofür werden sie benötigt? | Sie werden zur 2-D Berechnung benötigt Ebener Spannungszustand: Liegt vor, wenn ein 3-dimensionales Bauteil in zwei Raumrichtungen Spannungen aufweist, in der dritten jedoch nicht (z.B. freie Oberflächen, flache Rippen, dünne Beche). Ebener Spannungszustand: Die Lasten in der Ebene führen zu Dehnungen und damit zu Spannungen in dieser Ebene. In der Richtung normal zur Ebene treten Dehnungen durch Querkontraktionszahl auf, es entstehen aber keine Spannungen, weil die Dehnungen dort nicht gezwängt bzw. festgehalten werden, das Material kann sich frei ausdehnen. Es ist also grundsätzlich bei einem ebenen Spannungszustand ein dreidimensionaler Dehnungszustand gegeben. Ebener Dehnungszustand: Liegt vor, wenn ein 3-dimensionales Bauteil in zwei Raumrichtungen Dehnungen aufweist, in der dritten jedoch nicht. Wird auch als ebener Verzerrungszustand bezeichnet. Durch die Behinderung der Ausdehnung in die dritte Raumrichtung treten Spannungen in dieser auf. Es ist also bei einem ebenen Dehnungszustand ein 3-dimensionaler Spannungszustand gegeben. Beispiel: Eisenbahnschiene, Damm |
| 12. Welche Arten von Symmetrien kennst Du? Was macht ein FEM-Programm intern bei der Angabe von Symmetrien? | Achsensymmetrie, Zyklische Symmetrie, Axisymmetrie, Punktsymmetrie, Kugelsymmetrie, Translationssymmetrie etc. Das FEM-Programm setzt die horizontalen Verschiebungen/Verdrehungen an der Symmetrieachse oder auch Symmetrieebene zu 0, hält sie also fest |
| 13. Wofür werden Randbedingungen benötigt? | Die Grundgleichungen zur Beschreibung strukturmechanischer Probleme wie Spannungen, Deformationen etc. sind gewöhnliche oder partielle DGls bzw. Systeme von diesen. Die Lösungen dieser Probleme müssen bestimmten Randbedingungen genügen. Beispiel: Biegelinie des Balkens unter Querlast. Bei der Integration der Gleichungen gilt es die Integrationskonstanten mittels Randbedingungen zu ermitteln. |
| 14. Welche zwei grundlegende Arten von Randbedingungen gibt es in der Strukturmechanik? | In der Strukturmechanik unterscheidet man zwischen Kraftrandbedingungen und Verschiebungsrandbedingungen. Verschiebungsrandbedingungen wirken als Reduktion der Freiheitsgrade an den Elementknoten, den eigentlich unbekannten, zu berchnenden Verschiebungen wird an den jeweiligen Knoten ein fester Wert zugewiesen. Der Anwender muss zwei Probleme bewältigen: 1. Abstraktion der Lagerungsbedinungen (RB) des Bauteils 2. Implementierung der Randbedingungen ind das FEM-Modell |
| 15. Wie führt eine Wahl falscher RB zu Problemen? | Durch falsche RB wird das reale Bauteilverhalten ungenügend abgebildet, was zu falschen Ergebnissen und somit zu Bauteilversagen in der Realität führten kann |
| 16. Was sind in der FEM Freiheitsgrade? | Freiheitsgrade sind die Unbekannten der Knoten. Sie können unterschiedlicher Natur sein, so in der Strukturmechanik Verschiebungen, bei der Wärmeanalyse Temperaturen, Druck, Elektrische Spannungen etc. |
| 17. Was ist Defeaturing? | Beim Defeaturing werden für die Berechnung unwesentliche Details des Bauteils entfernt, das Modell vereinfacht, z.B. kleinste Flächen, Bohrungen. Das Netz wird so wesentlich gleichmäßiger |
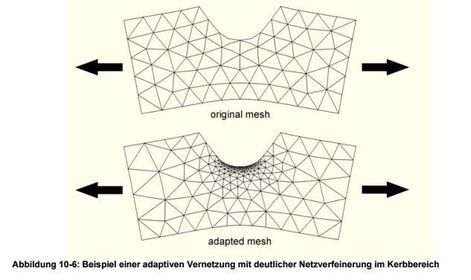
| 18. Welche Vernetzungsarten kennst Du? | 1. Free mesh: Für unregelmäßige Geometrieformen, meistens ausgeführt mit Dreiecks- oder Tetraederelementen. Vorteil: Gut automatisch ausführbar, Nachteil: Hohe Elementzahl, hoher Rechenaufwand. 2. Mapped mesh: Für regelmäßige Geometrieformen, meistens ausgeführt mit Viereck- oder Hexaederelementen. Vorteil: Geringe Elementanzahl, geringer Rechenaufwand, Nachteil: Nicht gut automatisch ausführbar 3. Manuelles Vernetzen über Seeds: An die Ränder des Modells werden Seeds gelegt, ein Algorithmus verteilt das Netz dann entsprechend auf das Element 4. Bottom-Up: Manueller, inkrementeller Vernetzungsprozess, ein hex-Netz wird erzeugt. Die Bindung zur Geometrie wird geschwächt oder teilweise sogar aufgehoben, die Ränder des Netzes sind nicht mehr unbedingt identisch mit den Rändern der Geometrie. Sehr zeitaufwändig. 5. Adaptive Vernetzung: Folge von Simulationen. Nach jeder Simulation werden die Ergebnisse und Netzverteilung ausgewertet und darauf basierend die Netzaufteilung optimiert, um genauere Ergebnisse zu erzeugen |
| 19. Was ist ein Element? | Ein diskreter Abschnitt des Bauteils bzw. des Berechnungsgebiets. Für die DGLs, die das Bauteilverhalten beschreiben, wird ein Ansatz für Abschnitte gewählt und Verbindungsbedingungen dieser Abschnitte berücksichtigt. Für jedes Element werden Ansatzfunktionen zu Grunde gelegt. Damit wird für das Element die geeignete Eigenschaft für die untersuchte Physik abgeildet, also etwa die Steifigkeit in der Strukturmechanik, ode die Leitfähigkeit im Temperaturfeld oder die Feldeigenschaft im Magnetfeld etc. |
| 20. Welche Elementtypen kennst Du? | 1. Punktförmige Elemente (Konzentriete Massenpunkte, können auch Referenzpunkte für geometrische Konturen wie Kontaktoberflächen darstellen. Solch ein Element hat 1 Knoten 2. 1D-Linienelement: Balkenelemente, Stabelemente, Rohr, Feder. Solch ein Element hat zwei Knoten. Anwendung: Fachwerke, Wellen, Rahmentragwerke, Rohrleitungen 3. 2D-Flächenelemente: Kontinuumselemente für ein ebenes Modell, für 2D-Modelle mit Rotationssymmetrie, ebenen Spannungs- oder Dehnungszustand, Schalenelemente. Solch ein Element hat 4 oder manchmal nur 3 Knoten. Anwendungen: Blechbauteile, Behälter, Gehäuse 4. 3D-Volumenelemente: 3-dimensional, Hexaeder, Tetraeder, Pyramiden. Ein solches Element hat 8 oder weniger Knoten. Anwedung: Halter, dicke Bauteile, Aufhänger |
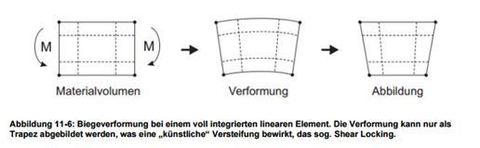
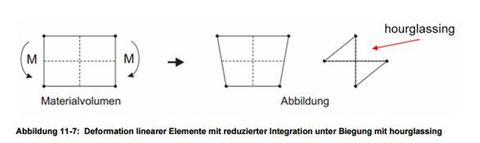
| 21. Welches Problem ergibt sich bei voll integrierten Elementen mit linearem Ansatz? | Sie reagieren unter Biegung steif, auch als "shear locking" bezeichnet. Mit linearen Ansätzen lassen sich Biegeverformungen nur als Trapez abbilden. Das führt zu künstlichen Schubspannungen in den Gauß-Punkten, was zu einem steifen Elementverhalten führt. Voll integrierte, lineare Elemente eignen sich also nur für Modelle, bei denen keine Biegung auftritt |
| 22. Welche Alternative gibt es zu linearen, voll integrierten Elementen? Welche Probleme birgt die Alternative? | Elemente mit reduzierter Integration. Bei ihnen werden weniger Integrationspunkte verwendet, als bei voller Integration. Problem: Lineare Elemente mit nur einem Integrationspunkt haben das Problem, dass sie zu flexibel sind und zum sog. "hourglassing" neigen. Dies ist ein Verformungsmodus, bei dem keine Dehnungsenergie erzeugt wird, also auch keine Steifigkeit gegen Verformung generiert wird, was zu sinnlosen Ergebnissen führt. Quadratische Elemente weisen dieses Problem nicht auf |
| 23. Welche allgemeinen Regeln gibt es zur Elementauswahl? | 1. Elementverzerrungen sollten so weit wie möglich vermieden werden. Grobe Netze mit verzerrten, linearen Elementen können zu schlechten Ergebnissen führen 2. Feine Netze aus linearen, reduzierten Elementen eigen sich für große Verzerrungen 3. 3D-Sechsflächenelemente geben prinzipiell die besten Ergebnisse bei den geringsten Rechenkosten. Für komplexe Geometrien sind jedoch vierflächige Elemente (Tetraeder) erforderlich. Lineare Elemente dieser Art benötigen jedoch feine Netze, um gute Ergebnisse zu erzielen 4. Netze, die nur aus linearen Tetraederelementen bestehen, führen zu schlechten Ergebnissen, es sei denn, es wird eine extrem große Elementzahl verwendet |
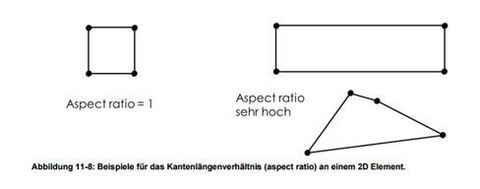
| 24. Welche wichtige Kenngröße gibt es für Elemente? | Das Kantenlängenverhältnis ("aspect ratio"). Es handelt sich dabei um das Längenverhältnis der längsten Kante eines Elements zur kürzesten Kante des Elements bei einer FEM-Simulation mit ebenen Elementen und Volumenelementen. Ein Wert von 1,0 und 90° ist optimal. Ein davon abweichender Wert hat Auswirkungen auf die Genauigkeit der Lösung der Werte innerhalb der Elemente (Dehnungen, Spannungen in der Strukturmechanik). Außerdem wird bei stark verzerrten Netzen die Rechengeschwindigkeit herabgesetzt |
| 25. Welche Koordinatensysteme gibt es bei der FEM? | 1. Globale und lokale Koordinatensysteme, werden verwendet, um geometrische Größen im Raum zu platzieren 2. Das Darstellungskoordinatensystem bestimmt, in welchem Koordinatensystem geometrische Größen dargestellt und aufgelistet werden 3. Das Knotenkoordinatensystem legt die Richtungen der Freiheitsgrade für jeden Knoten fest, wonach sich Randbedingungen und Knotenlasten richten 4. Das Elementkoordinatensystem legt die Orientierung von Materialeigenschaften und der elementbezogenen Ergebnisse fest 5. Das Ergebniskoordinatensystem wird zum Umrechnen von Ergebnisdaten zur grafischen Darstellungen oder zur Ausgabe beim Postprocessing verwendet Die einzelnen Koordinatensysteme können über Matrizentransformation ineinander überführt werden. Zu Beginn der Rechnung werden i.d.R. alle Elementsteifigkeitsmatrizen in das globale Koordinatensystem transformiert |
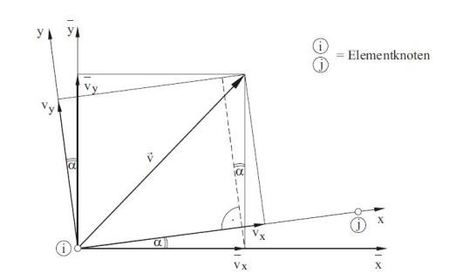
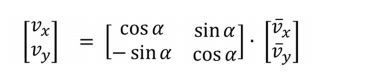
| 26. Gib die Kraft-Steifigkeit-Verschiebungsmatrix für ein einfaches Stabelement an | Die Elementsteifigkeit verknüpft dabei die Knotenkräfte mit den Knotenverschiebungen in Wirkrichtung. Kommt ein Element anders zu der Wirkrichtung zu liegen, so wird auch die Steifigkeit transformiert werden müssen |
| 27. Wie wird ein Vektor transformiert? | |
| 28. Wofür wird die Nachlaufrechnung benötigt? Was liegt dieser zu Grunde? | Um von den Knotenverschiebungen auf die Spannungen in den Elementen sowie den Lagerreaktionen zu kommen. Der Nachlaufrechnung liegt das Werkstoffgesetz zu Grunde |
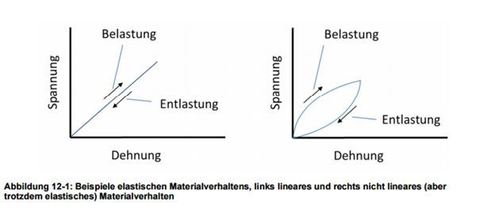
| 29. Das homogene, linear elastische, isotrope Materialverhalten ist der einfachste Fall von Materialverhalten. Zeichne das lineare und nicht lineare Verhalten für diesen Fall. | |
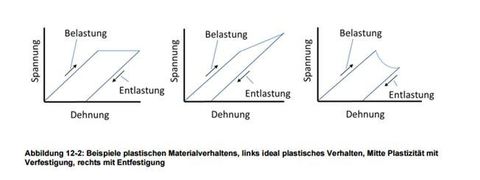
| 30. Zeichne Beispiele plastischen Materialverhaltens | |
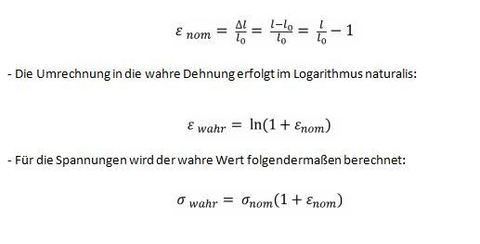
| 31. Die FEM rechnen mit den wahren Spannungen und Dehnungen. Wie werden diese umgerechnet? | |
| 32. Wodurch äußern sich Singularitäten a) im Modell und b) im Element? Wo treten diese auf? | Singularitäten äußern sich a) durch unendlich hohe Spannungen im Modell, die nicht gegen einen endlichen Wert konvergieren und b) durch einen Spannungsabfall im Element. Singularitäten treten an sehr scharfen Ecken oder Kerben mit sehr kleinem Radius auf, z.B. am Rand oder an der Wurzel einer Schweißnaht oder an einer Rissspitze |
| 33. Mit welchen Methoden lassen sich Singularitäten vermeiden? | 1. Ein Bauteil mit einer sehr scharfen Ecke oder Kerbe könnte relativ grob vernetzt werden, und anschließend auf das Ergebnis ein entsprechender Kerbfaktor aufgeschlagen werden 2. Da eine 90° Ecke in der Realität üblicherweise nicht auftritt, kann bei der Berechnung ein kleiner Radius angenommen werden 3. Bei duktilen Materialien bauen sich sehr große Spannungen durch Fließen wieder ab. Ein solches Verhalten könnte im Materialmodell berücksichtigt werden 4. Da für den Rand oder die Wurzel einer Schweißnaht sehr stochastische Bedingungen vorliegen, ist es üblich, eine Kerbe mit einem Radius von 1 mm zu modellieren und damit die Kerbbedingungen pauschal zu erfassen 5. Für die Simulation der Bedingungen an einer Rissspitze werden die Methoden der Bruchmechanik angewendet. Durch ein FEM-Modell mit Elementen mit Zwischenknoten (Kantenmittenknoten), bei denen der Kantenmittenknoten auf eine ¼ Position verschoben wird, kann durch die Ansatzfunktionen die theoretisch unendlich hohe Spannung an der Rissspitze simuliert und mechanisch angemessen abgebildet werden |
| 34. Wann sollten reduziert, wann voll integrierte Elemente in Abaqus verwendet werden? Welche Elemente sind gut für Kontaktprobleme geeignet? | Quadratische, voll integrierte Elemente sollten verwendet werden, um lokale Spannungskonzentrationen. Quadratische, reduziert integrierte Elemente sind für die meisten Probleme gut geeignet, mit der Ausnahme von großen Verformungen oder komplexe, sich annähernde Kontakte. Für Kontaktprobleme bieten lineare, reduziert integrierte Elemente gute Ergebnisse für hohe Netzverzerrungen. |
| 35. Was versteht man unter "Nichtlinearität"? | Eine Nichtlinearität in der CAE-Simulation ist eine Abhängigkeit der Modelleigenschaften von den Freiheitsgraden der Berechnung. Die Freiheitsgrade sind die primären Unbekannten der Berechnungsaufgabe, und eine Nichtlinearität liegt dann vor, wenn die Eigenschaften des Modells (Matrizen des Gleichungssystems) oder die Lastdaten (rechte Seite des Gleichungssystems) von den Freiheitsgraden abhängig sind |
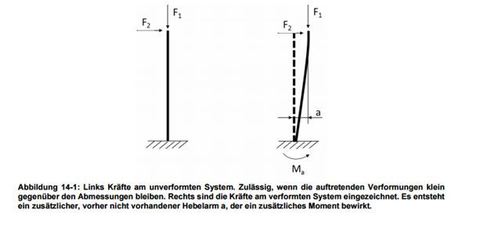
| 36. Wann tritt Nichtlinearität in der Strukturmechanik auf? | 1. Wenn das Gleichgewicht am verformten Bauteil betrachtet wird (Geometrienichtlinearität, Theorie 2.Ordnung, auch Stress stiffening genannt), große Verdrehungen, oder große Dehnungen auftreten. Das führt dazu, dass die grundlegende Annahme der technischen Mechanik, dass die Verformungen klein gegenüber den Bauteilabmessungen sind, nicht mehr gegeben ist. Durch die Verformungen treten zusätzliche, elastische Hebelarme auf, die zu zusätzlichen Belastungen führen können. 2. Wenn das Materialverhalten nicht linear-elastisch bleibt (Materialnichtlinearität, z.B. Plastizität) 3. Wenn die Randbedingungen (also Lagerungen und Lasten) von den Freiheitsgraden abhängig sind (Strukturnichtlinearität, z.B. Kontakt) |
| 37. Zeichne eine Skizze zur Nichtlinearität | |
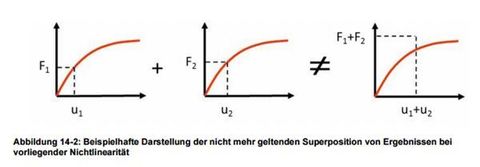
| 38. Eine Simulation mit Nichtlinearitäten ist nicht mehr konservativ, das Ergebnis also nicht proportional zu den Lasten und eine Superposition daher nicht zulässig. Zeichne eine Skizze | |
| 39. Wie werden Nichtlinearitäten gelöst? | Die Lösung einer Simulation mit Nichtlinearitäten erfolgt iterativ durch eine sogenannte Zeitdiskretisierung, d.h. die Lasten und Verformungen werden zeitabhängig aufgebracht und berechnet. Es stehen implizite und explizite Lösungen zur Verfügung. Implizit: Für jeden Schritt neue Steifigkeitsmatrix und neuer Verschiebungsvektor, immer Gleichgewicht Explizit: Rechenzeit geringer, kein Gleichgewicht gegeben |
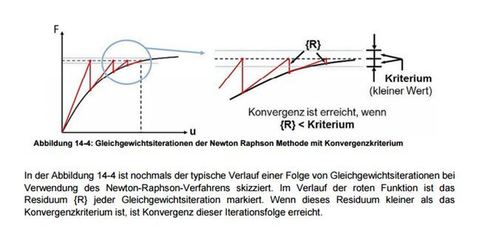
| 40. Was macht die Gleichgewichtsiteration? | Eine Gleichgewichtsiteration stellt eine Lösung des Gesamtgleichungssystems dar, bei der anschließend eine Gleichgewichtskontrolle durchgeführt wird. Dabei werden mit den berechneten Ergebnissen die inneren Kraftgrößen (Kräfte, Momente, Wärmeströme) in den Elementen berechnet und an allen Knoten des Modells Summen gebildet, wobei die äußeren Lasten einbezogen werden. Wenn diese Summation insgesamt an allen Knoten nur noch einen geringfügigen Restwert (Residuum) ergibt, ist die Lösung für diesen Lastzustand konvergiert. |
| 41. Was macht das Newton-Raphson-Verfahren? | Das NRV ist ein Verfahren, um mit einer Folge von Iterationen die Nichtlinearitäten zu berücksichtigen. Es hat zum Ziel, alle nichtlinearen Bedingungen zu erfüllen und bei der Gleichgewichtskontrolle nur noch einen geringfügigen Restwert (Residuum) zu erhalten. |
| 42. Zeichne eine Skizze zum NRV | |
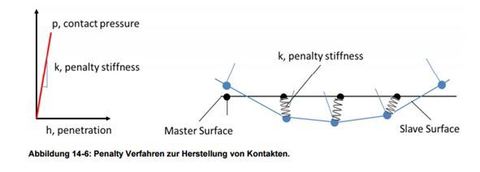
| 43. Was macht der Penalty-Faktor, was der Lagrange-Multiplikator? | Mit dem Penalty-Faktor wird bei der Berührung am Kontakt eine Elementsteifigkeitsmatrix erstellt und damit ein Beitrag in der Gesamtsteifigkeitsmatrix eingefügt. Der geschlossene Kontakt wird damit wie ein Federelement zwischen den Teilen des Modells simuliert. Mit dem Lagrange-Multiplikator werden bei der Berührung am Kontakt Beiträge im Lastvektor eingefügt. Der geschlossene Kontakt wird damit durch die entsprechende Kontaktkräfte zwischen den Teilen des Modells simuliert. Es ist üblich, eine geringe Eindringung in Kauf zu nehmen und daraus die Kontaktkräfte abzuleiten. Die Kraftübertragung geschieht also durch Kontaktflächen. |
| 44. Zeichne das Prinzip des Penalty-Faktors | |
| 45. Was steht beim PdvV im Gleichgewicht? | Die äußere virtuelle Arbeit mit der inneren geleisteten Arbeit Die äußere Arbeit ist das Produkt aus den virtuellen äußeren Verschiebungen und den äußeren Kräften. Diese ist gleich der inneren Arbeit, die durch Spannungen und Verzerrungen bestimmt wird. |
| 46. Was ist der Ansatz des PdvV? | Beim PdvV werden kleine gedachte Verschiebungen δu eingeführt, welche nicht die Randbedingungen verletzen. |
| 47. Was ist die Aufgabe des Preprozessors? | - Generierung eines berechenbaren FE-Modells - Diskretisierung - Zuweisung der Elementtypen - Aufstellung der Materialmodelle - Definition von Kräften und Randbedingungen |
| 48. Was ist die Aufgabe des Solvers? | - Mathematische Berechnung - Ermittlung der Einzelelementsteifigkeitsmatrizen - Transformation aller Matrizen in ein KO-System - Aufstellen der Gesamtsteifgkeitsmatrix - Numerische Berechnung - Nachlaufrechnung |
| 49. Was ist die Aufgabe des Post-Prozessors? | - Auswertung der Ergebnisse - Farbliche Darstellung - Visualisierung - Plausibilitätsprüfung |
| 50. Beschreibe das Galerkin-Verfahren | - Methode des gewichteten Restes - Dabei wird das gewichtete Residuum einer Näherungslösung minimiert - DGL mit der gesuchten Größe u und der bekannten Größe r |
| 51. Beschreibe den Ablauf bei der adaptiven Vernetzung | 1. Simulation mit dem Anfangsnetz 2. Auswertung der Ergebnisse 3. Berechnung der Ungenauigkeiten 4. Ableiten der Kriterien für die Netzänderung 5. Optimierte Diskretisierung 6. Durchführung mit neuer Vernetzung |
| 52. Welche direkten Lösungsverfahren gibt es, welche iterativen? | Direkt: Choleski-Verfahren, Gauß (LU Triangulisierung) Iterativ: Jakobi, Gauß-Seidel, Konjugierte Gradienten |
| 53. Was ist Elastostatik? Welche Annahmen liegen deren Grundgleichungen zu Grunde? | Die Elastostatik beschreibt das elastische Verhalten eines Körpers unter einer äußeren oder inneren Belastung bzw. Beanspruchung. 2 Annahmen: 1. Auftretende Verformungen sind gegenüber den Bauteilabmessungen klein, d.h. es treten keine Nichtlinearitäten aufgrund elastischer Hebelarme auf. 2. Es handelt sich um reversible Verformungen |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
¿Quieres crear tus propias Fichas gratiscon GoConqr? Más información.