18988571
Description
Mind Map by Jhoan Gordillo, updated more than 1 year ago
|
|
Created by Jhoan Gordillo
over 5 years ago
|
|
LEGO MINDSTORMS NXT
- INTRODUCCION
- CONSTRUIR
- La guia proporciona
instrucciones
especificas para
construir un robot
- La guia proporciona
instrucciones
especificas para
construir un robot
- PROGRAMAR
- Se puede
programar un
robot utilizando el
software LEGO
MINDSTORMS
Education NXT
- Se puede
programar un
robot utilizando el
software LEGO
MINDSTORMS
Education NXT
- PONER A PRUEBA
- Ejecute el programa y
si el robot no funciona,
programe y vuelva a
intentar
- Ejecute el programa y
si el robot no funciona,
programe y vuelva a
intentar
- CONSTRUIR
- TECNOLOGIA
- LADRILLO NXT
- El NXT, un ladrillo inteligente de
LEGO controlado por ordenador,
es el cerebro del robot de LEGO
MINDSTORMS
- El NXT, un ladrillo inteligente de
LEGO controlado por ordenador,
es el cerebro del robot de LEGO
MINDSTORMS
- SENSORES TACTILES
- Le permiten al robot
responder a obstáculos
en el entorno.
- Le permiten al robot
responder a obstáculos
en el entorno.
- SENSOR ACUSTICO
- Le permite al robot responder a
los niveles de sonido.
- Le permite al robot responder a
los niveles de sonido.
- SENSOR FOTOSENSIBLE
- Le permite al robot
responder a las variaciones
del nivel de luz y de color.
- Le permite al robot
responder a las variaciones
del nivel de luz y de color.
- SENSOR ULTRASONICO
- Le permite al robot medir la
distancia hacia un objeto y
responder al movimiento.
- Le permite al robot medir la
distancia hacia un objeto y
responder al movimiento.
- LAMPARAS Y CABLES CONVERSORES
- Agregue lámparas y luego programe
las luces intermitentes, o utilícelas
para activar el sensor fotosensible, o
tan solo por diversión. En el equipo
de base se incluyen tres lámparas y
tres cables conversores.
- Agregue lámparas y luego programe
las luces intermitentes, o utilícelas
para activar el sensor fotosensible, o
tan solo por diversión. En el equipo
de base se incluyen tres lámparas y
tres cables conversores.
- SERVOMOTORES INTERACTIVOS
- Asegúrese que los robots se muevan
suavemente y con precisión.
- Asegúrese que los robots se muevan
suavemente y con precisión.
- BATERIA RECARGABLE
- Le suministra la energía al NXT para que
el robot se pueda mover y responder.
- Le suministra la energía al NXT para que
el robot se pueda mover y responder.
- OTROS TIPOS DE BATERIA
- El NXT también funciona usando seis baterías
AA/LR6. • Se recomiendan las baterías alcalinas. •
Se pueden utilizar baterías recargables de tipo
AA/LR6. Sin embargo, puede que disminuya el
rendimiento de la potencia del NXT.
- El NXT también funciona usando seis baterías
AA/LR6. • Se recomiendan las baterías alcalinas. •
Se pueden utilizar baterías recargables de tipo
AA/LR6. Sin embargo, puede que disminuya el
rendimiento de la potencia del NXT.
- BATERIAS BAJAS
- Cuando la energía de las baterías está
baja, este icono parpadea en la pantalla
del NXT.
- Cuando la energía de las baterías está
baja, este icono parpadea en la pantalla
del NXT.
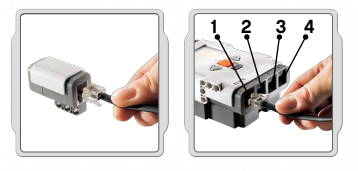
- CONEXIÓN DE LOS MOTORES
- Para conectar un motor al NXT, conecte un extremo
de un cable negro al motor. Conecte el otro extremo
a uno de los puertos de salida (A, B o C).
- Para conectar un motor al NXT, conecte un extremo
de un cable negro al motor. Conecte el otro extremo
a uno de los puertos de salida (A, B o C).
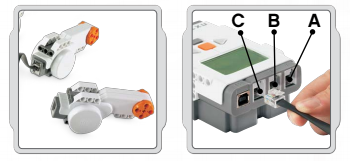
- CONEXIÓN DE LOS SENSORES
- Para conectar un sensor al NXT, conecte un extremo de un
cable negro al sensor. Conecte el otro extremo a uno de los
puertos de entrada (1, 2, 3 o 4).
- Para conectar un sensor al NXT, conecte un extremo de un
cable negro al sensor. Conecte el otro extremo a uno de los
puertos de entrada (1, 2, 3 o 4).
- CARGA Y DESCARGA DE ARCHIVOS
- El puerto USB y el Bluetooth inalámbrico se utilizan para
cargar y descargar datos entre su ordenador y el NXT.
- El puerto USB y el Bluetooth inalámbrico se utilizan para
cargar y descargar datos entre su ordenador y el NXT.
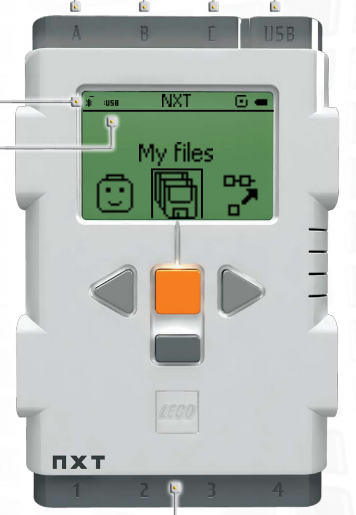
- INTERFAZ DEL NXT
- El ladrillo NXT es el cerebro del robot de LEGO®
MINDSTORMS® Education. Es un ladrillo de LEGO controlado
por ordenador que aporta un comportamiento programable,
inteligente y de toma de decisiones.
- PUERTOS DE SALIDA
- El NXT dispone de tres puertos
de salida con las etiquetas A, B
y C para motores o lámparas.
- El NXT dispone de tres puertos
de salida con las etiquetas A, B
y C para motores o lámparas.
- PUERTO USB
- Conecte un cable USB al puerto USB y descargue los
programas desde su ordenador al NXT (o cargue datos
desde el robot hacia su ordenador). También puede
utilizar la conexión inalámbrica Bluetooth para cargar
y descargar datos.
- Conecte un cable USB al puerto USB y descargue los
programas desde su ordenador al NXT (o cargue datos
desde el robot hacia su ordenador). También puede
utilizar la conexión inalámbrica Bluetooth para cargar
y descargar datos.
- ICONO BLUETOOTH
- El icono Bluetooth muestra el estado actual de
las conexiones inalámbricas Bluetooth. Si no se
visualiza el icono Bluetooth, el Bluetooth está
desactivado.
- El icono Bluetooth muestra el estado actual de
las conexiones inalámbricas Bluetooth. Si no se
visualiza el icono Bluetooth, el Bluetooth está
desactivado.
- ICONO USB
- Cuando conecta el NXT a un ordenador con
un cable USB, se visualizará el icono USB. Si
desconecta el cable USB, el icono
desaparecerá.
- Cuando conecta el NXT a un ordenador con
un cable USB, se visualizará el icono USB. Si
desconecta el cable USB, el icono
desaparecerá.
- TOMA DE CORRIENTE
- Si está utilizando la batería recargable y precisa
cargarla, o si no está utilizando baterías 6AA,
puede conectar un adaptador de corriente al NXT
utilizando la toma de corriente. (Los adaptadores
se venden por separado).
- Si está utilizando la batería recargable y precisa
cargarla, o si no está utilizando baterías 6AA,
puede conectar un adaptador de corriente al NXT
utilizando la toma de corriente. (Los adaptadores
se venden por separado).
- El ladrillo NXT es el cerebro del robot de LEGO®
MINDSTORMS® Education. Es un ladrillo de LEGO controlado
por ordenador que aporta un comportamiento programable,
inteligente y de toma de decisiones.
- ICONO DE FUNCIONAMIENTO
- Cuando se enciende el NXT, el icono de
funcionamiento gira. Si el icono de funcionamiento
se detiene y no gira, se ha congelado el NXT y debe
reiniciarlo.
- Cuando se enciende el NXT, el icono de
funcionamiento gira. Si el icono de funcionamiento
se detiene y no gira, se ha congelado el NXT y debe
reiniciarlo.
- NIVEL DE BATERIA
- El icono de la batería muestra el nivel de energía
del NXT. Cuando la energía de la batería está baja
(menos del 10% de aproximadamente), el icono de
la batería parpadea.
- El icono de la batería muestra el nivel de energía
del NXT. Cuando la energía de la batería está baja
(menos del 10% de aproximadamente), el icono de
la batería parpadea.
- ALTAVOZ
- Cuando se incluyen sonidos en
un programa, puede oírlos a
través del altavoz.
- Cuando se incluyen sonidos en
un programa, puede oírlos a
través del altavoz.
- BOTONES DEL NXT
- Naranja: Encender/Intro.
Flechas gris claro: Navegación,
izquierda y derecha Gris
oscuro: Borrar/Regresar.
- Naranja: Encender/Intro.
Flechas gris claro: Navegación,
izquierda y derecha Gris
oscuro: Borrar/Regresar.
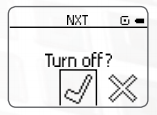
- APAGADO DE SU NXT
- 1. Presione el botón gris oscuro hasta que vea esta pantalla.
2. Presione el botón naranja para apagar el NXT. Presione el
botón gris oscuro para volver al menú principal del NXT.
- 1. Presione el botón gris oscuro hasta que vea esta pantalla.
2. Presione el botón naranja para apagar el NXT. Presione el
botón gris oscuro para volver al menú principal del NXT.
- PUERTOS DE
ENTRADA
- El NXT dispone de cuatro puertos de entrada
para conectar sensores. Los sensores deben
conectarse al puerto 1, 2, 3 o 4.
- El NXT dispone de cuatro puertos de entrada
para conectar sensores. Los sensores deben
conectarse al puerto 1, 2, 3 o 4.
- NOMBRE DEL NXT
- Puede cambiar el nombre de su NXT dirigiéndose a la
ventana del NXT en el software. Se puede acceder a esta
ventana desde el controlador. Los nombres del NXT pueden
tener como máximo ocho caracteres de longitud.
- Puede cambiar el nombre de su NXT dirigiéndose a la
ventana del NXT en el software. Se puede acceder a esta
ventana desde el controlador. Los nombres del NXT pueden
tener como máximo ocho caracteres de longitud.
- OPCIONES DE PANTALLA DEL NXT
- Su NXT dispone de muchas
otras funciones.
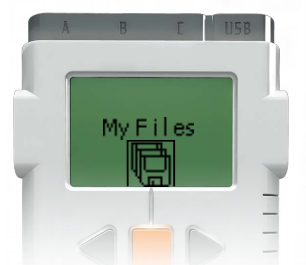
- MIS ARCHIVOS
- Los archivos se colocan
automáticamente en las
carpetas adecuadas.
- Los archivos se colocan
automáticamente en las
carpetas adecuadas.
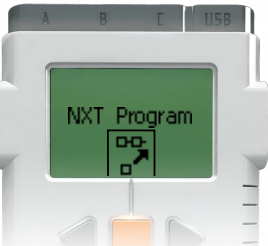
- PROGRAMA NXT
- No necesita un ordenador para
programar un robot. Puede
crear muchos programas sin su
ordenador, utilizando el
submenú Programa del NXT
[NXT Program].
- No necesita un ordenador para
programar un robot. Puede
crear muchos programas sin su
ordenador, utilizando el
submenú Programa del NXT
[NXT Program].
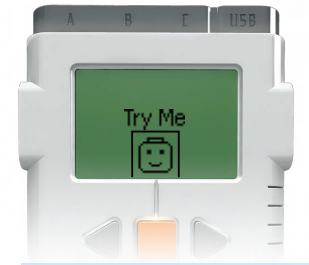
- PRUÉBEME
- La función Pruébeme [Try Me] le permite experimentar con
los sensores y los motores utilizando programas que están
listos para ejecutar.
- La función Pruébeme [Try Me] le permite experimentar con
los sensores y los motores utilizando programas que están
listos para ejecutar.
- REGISTRO DE DATOS
- El submenú Registro de datos de NXT [NXT Datalog] te
permite recopilar datos registrándolos sin necesidad de
tener conexión con tu ordenador.
- El submenú Registro de datos de NXT [NXT Datalog] te
permite recopilar datos registrándolos sin necesidad de
tener conexión con tu ordenador.
- VER
- En el submenú Ver [View], puede realizar una
prueba rápida de sus sensores y motores y
observar los datos actuales para cada uno.
- En el submenú Ver [View], puede realizar una
prueba rápida de sus sensores y motores y
observar los datos actuales para cada uno.
- CONFIGURACIÓN
- En el submenú Configuración [Settings],
puede ajustar las distintas configuraciones
del NXT, como el volumen del altavoz o el
modo suspendido [Sleep]. En este submenú,
también puede eliminar los programas que
haya almacenado en la memoria del NXT.
- En el submenú Configuración [Settings],
puede ajustar las distintas configuraciones
del NXT, como el volumen del altavoz o el
modo suspendido [Sleep]. En este submenú,
también puede eliminar los programas que
haya almacenado en la memoria del NXT.
- BLUETOOTH
- En el submenú Bluetooth [Bluetooth], puede
configurar una conexión inalámbrica entre su
NXT y otros dispositivos Bluetooth, como otras
unidades NXT, teléfonos móviles y ordenadores.
Puede utilizar una conexión inalámbrica para
descargar programas sin utilizar un cable USB.
Hasta puede programar un teléfono móvil para
controlar el NXT.
- En el submenú Bluetooth [Bluetooth], puede
configurar una conexión inalámbrica entre su
NXT y otros dispositivos Bluetooth, como otras
unidades NXT, teléfonos móviles y ordenadores.
Puede utilizar una conexión inalámbrica para
descargar programas sin utilizar un cable USB.
Hasta puede programar un teléfono móvil para
controlar el NXT.
- MIS ARCHIVOS
- Su NXT dispone de muchas
otras funciones.
- SENSOR TACTIL
- Puede agregar el sensor táctil a un modelo
NXT y luego programar el comportamiento
del modelo para que cambie cuando se
presiona o se libera el sensor táctil.
- Puede agregar el sensor táctil a un modelo
NXT y luego programar el comportamiento
del modelo para que cambie cuando se
presiona o se libera el sensor táctil.
- SENSOR ACUSTICO
- El sensor acústico detecta el nivel de decibeles:
la suavidad o intensidad de un sonido. El sensor
acústico detecta dB y dBA. dBA: sonidos que el
oído humano es capaz de oír. dB: todos los
sonidos existentes, incluyendo los sonidos
demasiado altos o bajos para el oído humano.
- El sensor acústico detecta el nivel de decibeles:
la suavidad o intensidad de un sonido. El sensor
acústico detecta dB y dBA. dBA: sonidos que el
oído humano es capaz de oír. dB: todos los
sonidos existentes, incluyendo los sonidos
demasiado altos o bajos para el oído humano.
- SENSOR FOTOSENSIBLE
- El sensor fotosensible le permite al robot distinguir
entre luminosidad y oscuridad, para obtener la
lectura de la intensidad de luminosidad en una
habitación y para medir la intensidad de luminosidad
sobre superficies de colores.
- El sensor fotosensible le permite al robot distinguir
entre luminosidad y oscuridad, para obtener la
lectura de la intensidad de luminosidad en una
habitación y para medir la intensidad de luminosidad
sobre superficies de colores.
- SENSOR ULTRASÓNICO
- El sensor ultrasónico le permite al robot ver
y reconocer objetos, evitar obstáculos,
medir distancias y detectar movimiento.
- El sensor ultrasónico le permite al robot ver
y reconocer objetos, evitar obstáculos,
medir distancias y detectar movimiento.
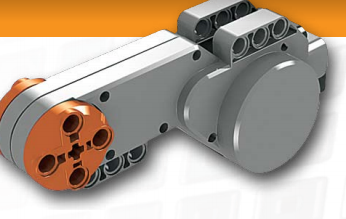
- SERVOMOTOR INTERACTIVO
- Los tres servomotores interactivos le proporcionan al
robot la capacidad de moverse. El bloque Desplazar
[Move] automáticamente alinea sus velocidades para que
el robot se mueva suavemente.
- Los tres servomotores interactivos le proporcionan al
robot la capacidad de moverse. El bloque Desplazar
[Move] automáticamente alinea sus velocidades para que
el robot se mueva suavemente.
- LAMPARAS
- Se puede encender y apagar las lámparas, para crear
patrones intermitentes de luz. También pueden
utilizarse para activar el sensor fotosensible, para
mostrar que un motor está encendido o para indicar el
estado de un sensor. También puede utilizarlas para
darle vitalidad a los “ojos” de su robot u otras funciones.
- Se puede encender y apagar las lámparas, para crear
patrones intermitentes de luz. También pueden
utilizarse para activar el sensor fotosensible, para
mostrar que un motor está encendido o para indicar el
estado de un sensor. También puede utilizarlas para
darle vitalidad a los “ojos” de su robot u otras funciones.
- LADRILLO NXT
- JHOAN SEBASTIAN GORDILLO ACOSTA - 907
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.