8625744
Description
Mind Map by Juan Manuel Ortiz Leon, updated more than 1 year ago
More
Modelos de
Identificación
- Dependiendo del tipo de
modelo obtenido
- Técnicas de
identificación no
paramétrica
- permiten obtener modelos o
representaciones no paramétricas de la
planta bajo estudio.
- Identificación no
paramétrica en el dominio
de la frecuencia
- el modelo resultante es una representación de la
respuesta en frecuencia del sistema, obtenida
mediante la aplicación de señales de entrada
sinusoidales de distintas frecuencias.
- el modelo resultante es una representación de la
respuesta en frecuencia del sistema, obtenida
mediante la aplicación de señales de entrada
sinusoidales de distintas frecuencias.
- Identificación no paramétrica
en el dominio del tiempo
- Mediante esta técnica de identificación se
pretende obtener la respuesta al impulso del
sistema, o bien la respuesta al escalón del mismo
(pudiendo obtenerse esta última mediante una
integración de la primera).
- Mediante esta técnica de identificación se
pretende obtener la respuesta al impulso del
sistema, o bien la respuesta al escalón del mismo
(pudiendo obtenerse esta última mediante una
integración de la primera).
- Identificación no
paramétrica en el dominio
de la frecuencia
- permiten obtener modelos o
representaciones no paramétricas de la
planta bajo estudio.
- Técnicas de
identificación
paramétrica
- quedan descritos mediante
una estructura y un número
finito de parámetros que
relacionan las señales de
interés del sistema
(entradas, salida y
perturbaciones).
- Tipos de modelos
paramétricos
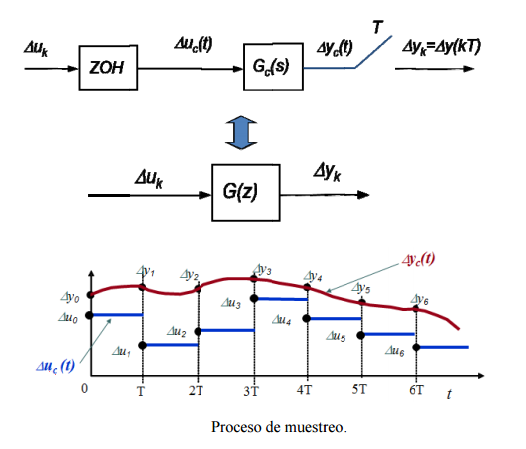
- los modelos paramétricos se describen
en el dominio discreto, puesto que los
datos que sirven de base para la
identificación se obtienen por muestreo.
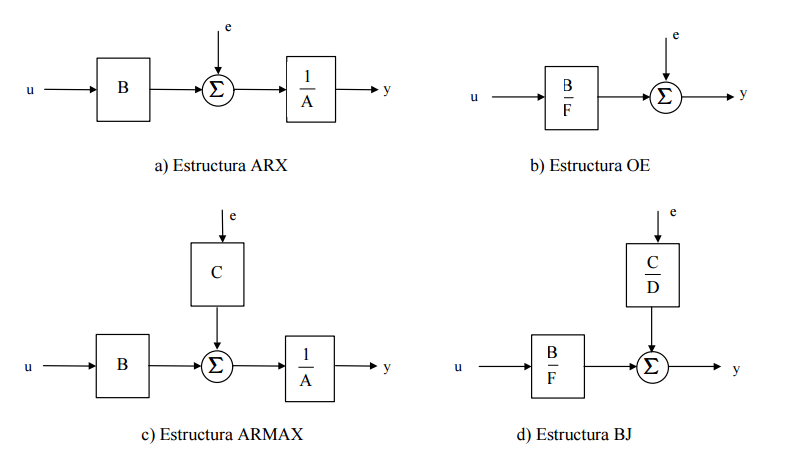
- Modelo ARX
- Equivale a introducir a la
salida “limpia” una
perturbación que es un ruido
blanco “e” previamente
filtrado por 1/A(z)
- Equivale a introducir a la
salida “limpia” una
perturbación que es un ruido
blanco “e” previamente
filtrado por 1/A(z)
- Modelo Output Error
(OE)
- Es decir, que a la
salida “limpia” se le
suma una
perturbación que es
directamente un
ruido blanco “e”.
- Es decir, que a la
salida “limpia” se le
suma una
perturbación que es
directamente un
ruido blanco “e”.
- Modelo ARMAX
- Es decir, que a la salida
“limpia” se le suma una
perturbación que es un
ruido blanco e previamente
filtrado por C(z)/A(z).
- Es decir, que a la salida
“limpia” se le suma una
perturbación que es un
ruido blanco e previamente
filtrado por C(z)/A(z).
- Modelo Box Jenkins (BJ)
- Es decir, que a la salida
“limpia” se le suma una
perturbación que es un
ruido blanco e
previamente filtrado
por C(z)/D(z).
- Es decir, que a la salida
“limpia” se le suma una
perturbación que es un
ruido blanco e
previamente filtrado
por C(z)/D(z).
- Modelo ARX
- los modelos paramétricos se describen
en el dominio discreto, puesto que los
datos que sirven de base para la
identificación se obtienen por muestreo.
- Tipos de modelos
paramétricos
- quedan descritos mediante
una estructura y un número
finito de parámetros que
relacionan las señales de
interés del sistema
(entradas, salida y
perturbaciones).
- Técnicas de
identificación no
paramétrica
- Dependiendo de la aplicación
- Métodos de identificación
off-line (a posteriori)
- utilizados en aquellas aplicaciones en que
no se requiera un ajuste continuado del
modelo. En estos casos, se realiza la
identificación previa de la planta,
considerándose que la validez de los
parámetros obtenidos no se verá alterada
con el paso del tiempo.
- utilizados en aquellas aplicaciones en que
no se requiera un ajuste continuado del
modelo. En estos casos, se realiza la
identificación previa de la planta,
considerándose que la validez de los
parámetros obtenidos no se verá alterada
con el paso del tiempo.
- Métodos de identificación
on-line (identificación recursiva)
- en los que los parámetros se van
actualizando continuamente a partir
de los nuevos datos de entrada-salida
obtenidos durante la evolución del
proceso. Estos métodos son muy
utilizados en sistemas de control
adaptativo.
- en los que los parámetros se van
actualizando continuamente a partir
de los nuevos datos de entrada-salida
obtenidos durante la evolución del
proceso. Estos métodos son muy
utilizados en sistemas de control
adaptativo.
- Métodos de identificación
off-line (a posteriori)
- Dependiendo del criterio de ajuste
de los parámetros
- mínimos cuadrados
- Consiste en obtener el
equivalente discreto de un
sistema continuo lineal , para ello
se debe especificar el periodo de
muestreo y el intervalo de valores
continuos que equivalen a un
mismo valor discreto
- Consiste en obtener el
equivalente discreto de un
sistema continuo lineal , para ello
se debe especificar el periodo de
muestreo y el intervalo de valores
continuos que equivalen a un
mismo valor discreto
- las variables instrumentales
- permite una estimación consistente cuando las
variables explicativas (covariables) se correlacionan con
los términos de error de la regresión.
- permite una estimación consistente cuando las
variables explicativas (covariables) se correlacionan con
los términos de error de la regresión.
- mínimos cuadrados
Media attachments
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.