35785818
Mars Exploration Mission
- Ideation
- Criteria
- Prescribed
- Go around immovable objects
- Touch sensor has to be pushed in very deep before it activates
- Immovable object would activate
- If only ultrasonic is activated, it's movable
- Movable would not
- Move movable objects
- Immovable object would activate
- Touch sensor has to be pushed in very deep before it activates
- Move movable objects
- Ultrasonic sensors detect all (if large enough) objects
- Both immovable AND movable would activate
- If touch and ultrasonic both activated, it's immovable object
- If only ultrasonic is activated, it's movable
- If touch and ultrasonic both activated, it's immovable object
- Go around immovable objects
- Both immovable AND movable would activate
- Ultrasonic sensors detect all (if large enough) objects
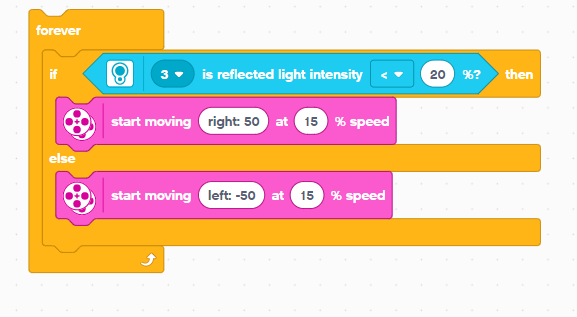
- Follow line
- Could use this existing algorithm:
- Could use this existing algorithm:
- Go around immovable objects
- Self-determined
- Externally display if robot gone off course
- Use screen of EV3 brick to display faces
- Use screen of EV3 brick to display faces
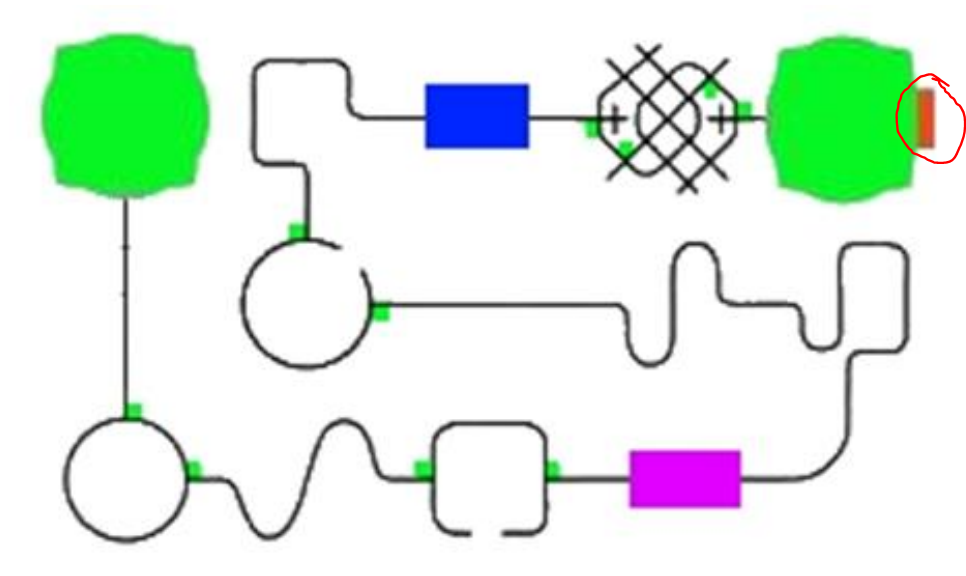
- Perform celebration dance once course if completed
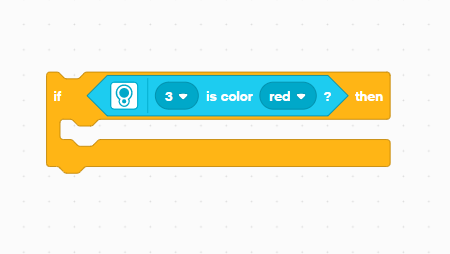
- End of course is red
- Can use following algorithm to detect end of course
- End of course is red
- Externally display if robot gone off course
- Prescribed
- Criteria
- Impacts
- Social
- Mansfield State High School
- Gains recognition for helping internationally renowned space agency
- IT curriculum and department would receive additional funding
- School receives more government funding
- IT curriculum and department would receive additional funding
- Gains recognition for helping internationally renowned space agency
- SpaceX
- Successful mission means for opportunites for future missions and economic gains
- Successful mission means for opportunites for future missions and economic gains
- Mansfield State High School
- Economic
- SpaceX would probably pay MSHS for the assistance
- Boosts local economy
- School/Students/Teachers gains additional funds
- Boosts local economy
- SpaceX would probably pay MSHS for the assistance
- Personal
- Students
- Gains recognition for assisting renowned space
agency
- Awards
- More opportunities from schools or organisations/companies looking to award scholarships or job opportunities
- Awards
- Gains recognition for assisting renowned space
agency
- Teachers
- Gains recognition for enabling students to complete challenge
- Awards
- Employment opportunities
- Awards
- Gains recognition for enabling students to complete challenge
- Students
- Social
- Non-functional Requirements
- Perform "celebration dance" once course is completed
- Aesthetic requirement
- Aesthetic requirement
- Perform "celebration dance" once course is completed
- Constraints + Limitations
- Robot
- Sensors
- Colour
- Can only be positioned one one side of robot
- May be faulty/unpredictable due to external factors such as shadows or distance positioned to the ground
- Can only be positioned one one side of robot
- Ultrasonic
- Can only be positioned in front of robot
- May not detect certain objects if on side of robot
- May not detect certain objects if on side of robot
- Cannot detect certain objects if too small
- Cannot detect further away than ~100 cms
- Can only be positioned in front of robot
- Touch
- Sensor is relatively small
- Can only be positioned on one side of the robot
- Has to be pushed in very deep before activated
- In some situations will not activate
- In some situations will not activate
- Sensor is relatively small
- Colour
- Sensors
- Personal/Self
- Lack of experience in coding
- Student
- Pre-occupied with other tasks; less time to work on project
- Other subjects
- Part-time jobs
- Extra-curricular activities
- Music
- Chess
- Music
- Other subjects
- Pre-occupied with other tasks; less time to work on project
- Lack of experience in coding
- Resources
- Websites
- Youtube
- Limited access at school
- Videos may be outdated or incorrect
- Limited access at school
- Requires internet
- ev3lessons.com
- Some lessons are outdated
- May be hard to understand or follow; created by students
- Lack of abundancy and variety of resources; created by students
- Some lessons are outdated
- Youtube
- Applications/Software
- EV3 classrooms
- Uses the Scratch 3.0 programming language
- Not text-based
- Inflexible
- Inflexible
- Not text-based
- Uses the Scratch 3.0 programming language
- EV3 classrooms
- Websites
- Task-specific
- Robot configuration can not be changed
- Time limitations
- Must be completed within 4 weeks
- Must be completed within 4 weeks
- Mat/Course
- Dirty and old
- Colour detection may be faulty
- Colour detection may be faulty
- Path
- Thin
- More difficult to detect and follow
- More difficult to detect and follow
- Thin
- Dirty and old
- Robot configuration can not be changed
- Robot
- Functional Requirements
- Self-determined criteria
- Course must be completed in 5 or less minutes
- Reduce chance of meeting severe weather events e.g. sandstorms
- Reduces chance of robot running out of battery midway through course
- Reduce chance of meeting severe weather events e.g. sandstorms
- Perform a "celebration dance" once course is completed
- Must be aesthetically unique and creative
- Turns
- Display face
- Sounds
- Turns
- Must be aesthetically unique and creative
- Externally display something to distinguish if robot has gone off-course (if detecting white with colour sensor)
- Helps humans to see if something has gone wrong
- Can be displays e.g. a sad face
- Sounds
- Can be displays e.g. a sad face
- Helps humans to see if something has gone wrong
- Course must be completed in 5 or less minutes
- Prescribed Criteria
- Detect and clear the moveable objects from the path
- Movable i.e. can be cleared by robot alone
- Object can be picked by
me
- Movable i.e. can be cleared by robot alone
- Detect and navigate around immovable objects
- Immovable i.e. cannot be cleared by robot alone and robot is forced to move around it AND return to path
- Object can be picked by me
- Immovable i.e. cannot be cleared by robot alone and robot is forced to move around it AND return to path
- Follow the path
- Black line
- Cannot move off of black line and not return
- Black line
- Detect and clear the moveable objects from the path
- Must be done within 4 weeks
- Includes written part
- Evaluation
- Algorithms
- Diagrams
- Etc.
- Evaluation
- Includes written part
- Self-determined criteria
- Available Resources
- Computers
- Internet
- GoConqr
- Easy Mindmaps
- Brainstorm ideas
- Easy Mindmaps
- Blackboard
- Makes information relating to task widely available
- Due dates
- How to perform certain tasks using EV3
- Information relating to assessment itself e.g. tasksheets
- Due dates
- Makes information relating to task widely available
- Youtube
- Tutorials
- Helps with formulation of algorithms and code to enable the ev3 robot to complete the challenge
- Answers potential questions e.g. how to make an ev3 robot follow a black line
- Helps with formulation of algorithms and code to enable the ev3 robot to complete the challenge
- Tutorials
- ev3lessons.com
- GoConqr
- Applications and software
- Microsoft Teams
- Enables for contact and communication with teachers and/or other students
- Ask Questions
- Mutual assistance
- Ask Questions
- Enables for contact and communication with teachers and/or other students
- Microsoft Word
- Enables for the editing of text
- Allows for completion of the written portion of assignment including but not limited to: prescribed
and self-determined evaluation criteria, evaluation, reference list/bibliography
- Allows for completion of the written portion of assignment including but not limited to: prescribed
and self-determined evaluation criteria, evaluation, reference list/bibliography
- Enables for the editing of diagrams, tables, and images
- Allows for the completion of diagrams or annotated photos showcasing two possible solutions
- Allows for the completion of diagrams or annotated photos showcasing two possible solutions
- Enables for the editing of text
- EV3 Classroom
- Allows for code to be created and edited, then to be uploaded to the EV3
robot
- Allows for code to be created and edited, then to be uploaded to the EV3
robot
- Microsoft Teams
- Internet
- EV3 robot
- Parts
- EV3 Brick
- Controls sensors and motors
- Play sounds and display images
- Can process code uploaded
- Controls sensors and motors
- Sensors
- Gyro
- Measures angles
- Make precise turns
- Helps robot to move around immovable object
- Helps robot to move around immovable object
- Make precise turns
- Measures angles
- Colour
- Detects colour and light intensity (ambient and reflected)
- Helps to keep robot on line
- Helps to keep robot on line
- Detects colour and light intensity (ambient and reflected)
- Ultrasonic
- Measures distance
- Detect immovable/movable objects?
- Detect immovable/movable objects?
- Measures distance
- Touch
- Detects objects
- Detect immovable/movable objects?
- Detect immovable/movable objects?
- Detects objects
- Gyro
- Motors
- Raises and lowers arm
- Allows for robot to clear movable objects
- Allows for robot to clear movable objects
- Turns wheels
- Make turns
- Allows to robot to follow path and navigate around immovable object
- Allows to robot to follow path and navigate around immovable object
- Move robot
- Make turns
- Raises and lowers arm
- EV3 Brick
- Parts
- Computers
Media attachments
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.