34548312
Descrição
FlashCards por ALIZ JEHIEL GONZÁLEZ JARAMILLO, atualizado more than 1 year ago
|
|
Criado por ALIZ JEHIEL GONZÁLEZ JARAMILLO
mais de 3 anos atrás
|
|
| Questão | Responda |
| EQUIPO: Dinamita INTEGRANTES: Aliz Jehiel González Jaramillo Carol Hortencia García Rojas Kimberly Jaen Sánchez Vivian Aylin Orihuela Flores | BLOQUE III MATERIA: Soluciones tecnológicas. 3er semestre Grupo 42 |
| DISPOSITIVOS TECNOLÓGICOS QUE ENLAZAN EL MUNDO DIGITAL. | |
| Los actuadores digitales: son dispositivos inherentemente mecánicos, su función es proporcionar fuerza para mover o “actuar” otro dispositivo mecánico. | TIPOS: - Motores de corriente continua: Los más usados actualmente. Versátiles y de fácil control. En el motor existe un sensor llamado actuador electrónico. - Controlados por excitación: Se crea un campo magnético de dirección fija. - Controlados por inducción: El inducido se sitúa en el estator. - Motores de corriente alterna: Tiene dos tipos, son los Síncronos y los asíncronos. - Motores de paso a paso: Pueden ser de tres tipos: de imanes permanentes, de reluctancia variables e híbridos. |
| Ejemplos de actuadores digitales: | - Electrónicos -Hidráulicos -Neumáticos -Eléctricos -Motores -Bombas |
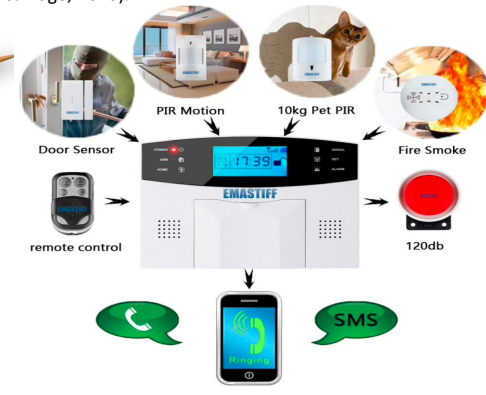
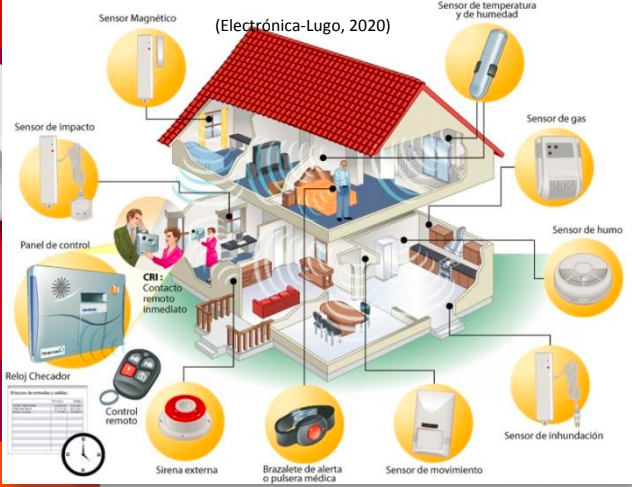
| Los sensores digitales: es un dispositivo que capta magnitudes físicas u otras alteraciones de su entorno. | TIPOS: - Según el principio de su funcionamiento: Activos y pasivos. - Según el tipo de señal eléctrica que generan: Digitales, analógicos y temporales. - Según el rango de valores que proporcionan: Todo o nada (ON-OFF), de medida. - Según el nivel de integración: discretos, integrados e inteligentes. - Según el tipo de variable física medida: mecánicos, eléctricos, magnéticos, términos, acústicos, etc. |
| Tipos de sensores digitales: | •Sensor de temperatura • Sensor de proximidad • Acelerómetro • Sensor IR (Sensor infrarrojo) • Sensor de presión • Sensor de luz • Sensor ultrasónico • Sensor de humo, gas y alcohol • Sensor táctil • Sensor de color • Sensor de humedad • Sensor de inclinación • Sensor de flujo y nivel |
| Ejemplos de sensores digitales: | |
| Un actuador analógico es aquel que produce un comportamiento analógico, comúmente eléctrico/mecánico, al recibir una señal procesada por un controlador. |
Ejemplos de Aplicación:
•Uso industrial:
• Líneas de producción.
• Líneas de ensamble.
•Uso doméstico:
• Sistemas de riego.
• Puertas automáticas.
• Electrodomésticos.
•Uso en investigación:
• Robótica inteligente.
• Automatización y control.
Image:
Ooo (binary/octet-stream)
|
| Un sensor analógico es aquel que como salida emite una señal comprendida por un conjunto de valores que varían a través del tiempo (valor analógico). |
Algunos ejemplos:
Sensores dedicados:
• Termometro
• Sensor de presión
• Velocímetro
• Sensor de profundidad de
líquidos.
• Sensor de gas.
• Sensor de humedad.
•Sensores de uso específico:
• Sensor de detección de
productos defectuosos.
• Polígrafo
Image:
Jh (binary/octet-stream)
|
| APRENDIENDO ARDUINO. | |
| ¿Qué es Arduino? Es una plataforma de desarrollo basada en una placa electrónica de hardware libre que incorpora un microcontrolador re-programable y una serie de pines hembra. Por lo tanto, la placa Arduino no es más que una PCB que implementa un determinado diseño de circuitería interna. Tipos de Arduino Arduino UNO , Arduino DUE, Arduino Leonardo, Arduino Mega, Arduino Mega ADK, Arduino Micro, Arduino Nano, Arduino FIO, Arduino YUN. | ¿En donde se puede usar Arduino? Arduino se puede utilizar para desarrollar elementos autónomos, o bien conectarse a otros dispositivos o interactuar con otros programas, para interactuar tanto con el hardware como con el software. |
| MOTORES ELÉCTRICOS QUE MUEVEN AL MUNDO. | |
| Motores DC: máquina que convierte la energía en mecánica, haciendo un movimiento rotatorio y genera un campo magnético. Corriente continua:Es una corriente eléctrica que fluye siempre en un sentido MOTORES DE CORRIENTE CONTINUA CLASIFICACIÓN(Según disposición del Inductor e Inducido): Motor de excitación independiente Motor Serie Motor derivación o shunt Motor compound EJEMPLO EN APLICACIONES: ➔ En coches ➔ En una bicicleta ➔ En un Patín | SERVOMOTORES: Es un dispositivo electromagnético consiste en un motor eléctrico, un juego de engranes y una tarjeta de control y todo dentro de una carcasa de plástico. CLASIFICACIÓN: ❖ Servomotores de rango de giro limitado ❖ Servomotores de rotación continua ❖ Servomotores de corriente continua ❖ Servomotores de corriente alterna EJEMPLOS DE SU APLICACIÓN: ➢ En las Industrias se utilizan herramientas, embalaje , automatización de fábricas etc. ➢ Aviones, Robots, Automóviles etc. |
| Motores de paso: Dispositivo electromagnético, convierte impulsos eléctricos en movimientos mecánicos de rotación lo que los caracteriza es que se mueven un paso por cada impulso que reciben. Estos motores están formados por: *El estator *El rotor CLASIFICACION DE MOTORES DE PASO motor de paso a paso de imán permanente motor paso a paso de reluctancia variable motor paso a paso híbrido. |
EJEMPLOS DE APLICACIÓN:
Estos se ponen en práctica en máquinas y aparatos electrónicos que necesitan alto nivel de presión como:
★ Maquinas para aplicacion de etiquetas
★ Impresion de formas continuas
★ Posicionamiento
Image:
E (binary/octet-stream)
|
| MODELOS DE SOLUCIONES TECNOLÓGICAS. | |
| Metodología de modelado de soluciones tecnológicas: Tenemos que diferenciar sobre las soluciones tecnológicas y Metodología: SOLUCIÓN TECNOLÓGICAS: refiere al diseño, creación e implementación de herramientas que hacen uso de hardware para solucionar el problema. METODOLOGÍA:métodos que se siguen en una investigación científica.(Pasos a seguir) PARA LAS SOLUCIONES TECNOLÓGICAS HAY QUE SEGUIR ETAPAS: ★ Análisis ★ Diseño ★ Pruebas ★ Validación | Diseñar el modelo de la solución tecnológica: En esta etapa va a definir qué se va a utilizar para llevar a cabo la solución, se tiene que identificar las necesidades fundamentales de la solución y los recursos disponibles y también el cómo se le va a dar solución al problema. Probar el modelo de la solución tecnológica: Corresponde al prototipado y realización de pruebas de la solución. En esta etapa se crea o se construye la solución propuesta para poder ser probada. En esta etapa las pruebas se hagan a pequeña escala con maquetas y materiales provisionales, eventualmente se sustituirán con los materiales, equipos y recursos necesarios para la implementación final. |
| Validar el modelo de solución tecnológica: implementa y valida la solución, es decir en esta etapa, se lleva el prototipo al siguiente nivel.Implementa en una situación real y representativa el problema original, para poder determinar o valorar si la solución tecnológica desarrollada cumple con lo esperado. |
Image:
Gfde (binary/octet-stream)
|
| SOLUCIONES TECNOLÓGICAS. |
Image:
Da (binary/octet-stream)
|
| PROTOTIPO Este es un representación visual o real, en la cual un servicio o el producto se lanza así el mercado, pero este tiene una finalidad la cual es, detectar todas las fallas que se presenten. | El prototipo se convierte en una en una herramienta que es integradora, de la forma que permite comunicar, aprender, persuadir o llegar a poder integrar una idea. |
|
DESING THINHING
Esto es un método para poder generar ideas innovadoras, que son centradas en eficacia y que puedan dar soluciones a todas las necesidades.
Image:
K (binary/octet-stream)
|
Tiene 6 funciones las cuales son: Empatizar, Definir, Ideas, Prototipos y Testea.
CARACTERISTICAS
*Se trabaja siempre en equipo.
*Se genera para poder modificar algunos resultados.
Image:
G (binary/octet-stream)
|
| ROBOTICA Esto es un análisis, diseño y manufactura de aplicación de máquinas automáticas, con un cierto grado de inteligencia, por ejemplo, son capaces de realizar tareas que pueden reemplazar en todo. |
La robótica se compone por:
*Control. *Computación.
*Mecánica. *Electrónica.
Image:
Fk (binary/octet-stream)
|
| ROBOT Es una maquina en la que es programable, pero posee cierto grado de inteligencia, que siempre es capaz de ejecutar las tareas de manera automática. |
Esta integrado por grupos de componente, que cuando interactúan hacen un posible funcionamiento entre ellos.
Sus piezas son mecánicas, electrónicas y electromecánicas.
Image:
Fad (binary/octet-stream)
|
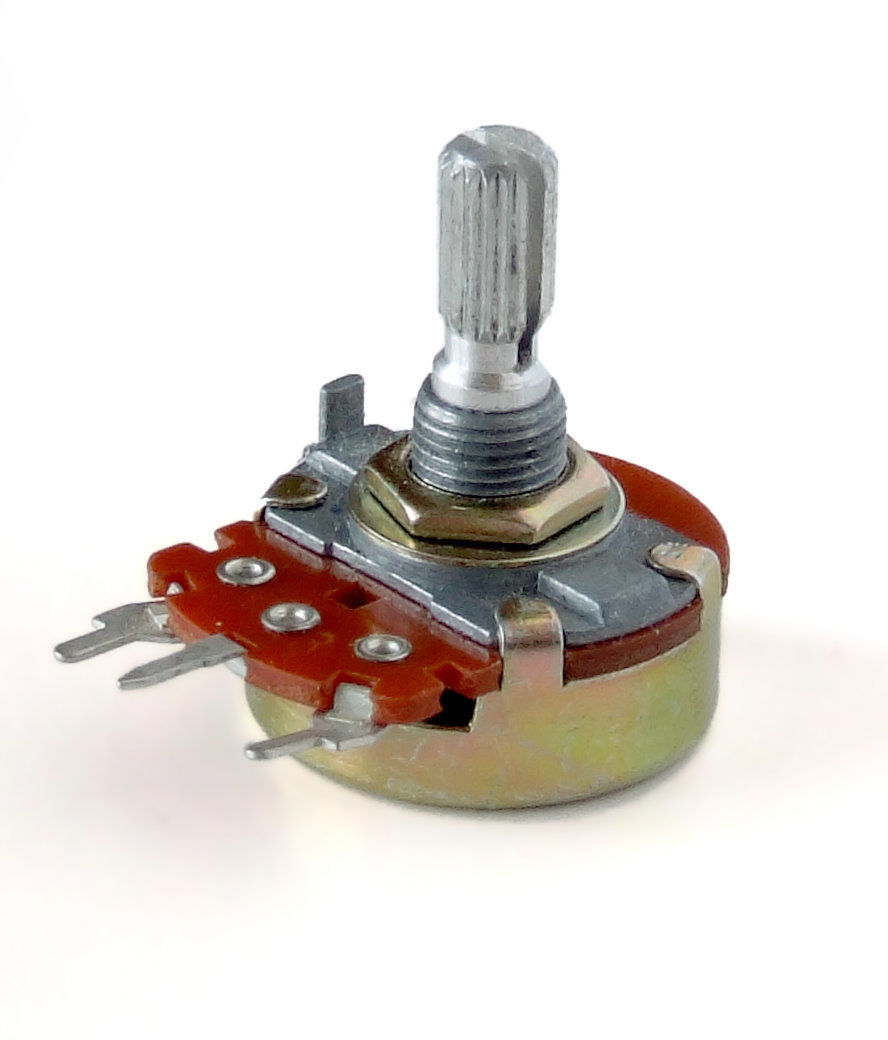
| EL POTENCIOMETRO | |
| El potenciómetro tiene un funcionamiento sencillo, lo cual tiene una resistencia variable, por lo cual cambia de valor a medida que aumenta la corriente. Así que esta resistencia posee tres terminales a las cuales se conectan el voltaje a medir | Existen dos resistencias, las cuales son: *FIJAS: Inversión, SMD. *VARIABLES: Potenciómetro, CGR, PTC/NTC. |
| Los Potenciómetros nos permiten controlar las funciones de algunos aparatos, como por ejemplo subir y bajar el volumen en un reproductor de música, amplificador de sonido. |
Existen diferentes potenciómetros, los cuales son:
*Lineal. *Algorítmico. *Senoidal. *Digital.
*Multivuelta.
Image:
Kfd (binary/octet-stream)
|
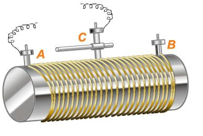
| Están compuesto por una resistencia de valor total constante a lo largo de la cual se mueve un cursor, así que es un contacto móvil que divide la resistencia total en dos resistencias de valor variable y cuya suma es la resistencia total, por lo que al mover el cursor una aumenta y la otra disminuye. | Por ejemplo, un potenciómetro de 10KΩ puede tener una resistencia variable con valores entre 0Ω y 10.000Ω. El potenciómetro más sencillo es una resistencia variable mecánicamente. Los primeros potenciómetros y más sencillos son los reóstatos |
|
Tenemos 3 terminales A, B y C. Si conectáramos los terminales A y B al circuito sería una resistencia Fija del valor igual al máximo de la resistencia que podría tener el reóstato.
Ahora bien, si conectamos los terminales A y C el valor de la resistencia dependería de la posición donde estuviera el terminal C, que se puede mover hacia un lado o el otro.
Hemos conseguido un Potenciómetro, ya que es una resistencia variable
Image:
Ff (binary/octet-stream)
|
GRACIAS. |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Quer criar seus próprios Flashcards gratuitos com GoConqr? Saiba mais.