34265549
Descrição
Mapa Mental por kid Leal nieto, atualizado more than 1 year ago
|
|
Criado por kid Leal nieto
mais de 3 anos atrás
|
|
Sistema de ecuaciones lineales, rectas,
planos y espacios vectoriales.
- Sistema de
ecuaciones lineales.
- Ecuación
- Igualdad entre dos
expresiones que
contiene una o varias
variables
- Sistema de Ecuaciones
- Conjunto de
Ecuaciones
- Líneal
- Cada ecuación
es de primer
grado
- Cada ecuación
es de primer
grado
- Conjunto de
Ecuaciones
- Igualdad entre dos
expresiones que
contiene una o varias
variables
- Tipo
- Compatible
Determinado
- Tiene una solución
- Tiene una solución
- Compatible
Indeterminado
- Tiene Infinitas soluciones
- Tiene Infinitas soluciones
- Incompatible
- No tiene soluciones
- No tiene soluciones
- Compatible
Determinado
- Forma matricial
de un sistema
- Es A*X=B
- Donde
- A es la matriz que en la fila k
contiene los coeficientes de las
incógnitas de la ecuación k .
- X es la matriz columna
con las incógnitas.
- B es la matriz columna con
los términos independientes
de las ecuaciones.
- A ∗ es la matriz ampliada o
aumentada del sistema
formada por las matrices A y B
- A=(A|B)
- A=(A|B)
- A es la matriz que en la fila k
contiene los coeficientes de las
incógnitas de la ecuación k .
- Donde
- Es A*X=B
- Método de
eliminación de Gauss
- Sin alterar las
soluciones del sistema
- Intercambiar el orden
de las ecuaciones.
- Sumar algunas de
sus ecuaciones.
- Multiplicar alguna
ecuación por un
número distinto de 0.
- Intercambiar el orden
de las ecuaciones.
- Se modifican
las ecuaciones
- Sobre la matriz
ampliada del sistema
- Hallar la forma escalonada
- Una matriz triangular superior
- un sistema mucho
más fácil de resolver
- Por sustitución
hacia atrás.
- Por sustitución
hacia atrás.
- un sistema mucho
más fácil de resolver
- Una matriz triangular superior
- Sobre la matriz
ampliada del sistema
- Sin alterar las
soluciones del sistema
- Ecuación
- Rectas.
- Una sucesión
infinita y consecutiva
de puntos en un
plano tridimensional
- Se representa por
- Ecuación general
- Ecuaciones
vectorial
- La recta r como un conjunto de puntos
del plano, alineados con un punto P y
con una dirección dada \vec v .
- Si P(x_1,y_1) es un punto de la recta r, el
vector, \vec PX o la dirección de este punto
P, tiene la misma dirección que la recta r
- La misma dirección que \vec v .
- \vec PX es igual al \vec v
multiplicado por un escalar:
- La recta r como un conjunto de puntos
del plano, alineados con un punto P y
con una dirección dada \vec v .
- Paramétricas
- Contiene los valores de todos los puntos
de la recta para x e y, respectivamente
- a_1 y a_2 son las coordenadas
del punto conocido A( a_1,a_2)
por el cual pasa la recta.
- v_1 y v_2 son las coordenadas de un
vector director, \vec V=( v_1,v_2), que
nos indica la dirección de la recta
- \lambda es un número real que nos
permitirá conocer cualquier coordenada
de la recta según el valor que se le asigne.
- Contiene los valores de todos los puntos
de la recta para x e y, respectivamente
- Simétricas
- Ecuación canónica o
segmentaria de la recta
- Son los valores dónde la recta corta a
cada uno de los ejes coordenados.
- El valor donde la recta corta
al eje X le llamaremos a
- El valor donde la recta corta
al eje Y le llamaremos b
- Generando los dos puntos en
el plano cartesiano (a, 0) y (0, b)
- El valor donde la recta corta
al eje X le llamaremos a
- Son los valores dónde la recta corta a
cada uno de los ejes coordenados.
- Ecuación canónica o
segmentaria de la recta
- mediante
- Coordenadas
- Puntos
- Funciones.
- Vectores
- Puntos
- Coordenadas
- Ecuaciones
vectorial
- Ecuación general
- Se representa por
- Una sucesión
infinita y consecutiva
de puntos en un
plano tridimensional
- Planos
- Superficie donde se pueden
trazar puntos y rectas
- Dimensiones
- Longitud
- Anchura
- Longitud
- Paralelos
- La misma distancia entre sí.
- Nunca se cortan
- No tienen punto en común.
- Ecuación general (o implícita)
de dos planos distintos:
- A1x+B1y+C1z+D1=0
- A2x+B2y+C2z+D2=0
- si sus coeficientes A, B y C
son proporcionales entre sí
- No con el coeficiente D
- (A1x)/(A2x)=(B1x)/(B2x)=(C1x)/(C2x)≠(D1x)/(D2x)
- (A1x)/(A2x)=(B1x)/(B2x)=(C1x)/(C2x)≠(D1x)/(D2x)
- No con el coeficiente D
- A1x+B1y+C1z+D1=0
- Propiedades
- Reflexiva
- Todo plano es
paralelo a sí mismo.
- Todo plano es
paralelo a sí mismo.
- Simétrica
- Si un plano es paralelo a otro, aquel
plano también es paralelo al primero.
- Si un plano es paralelo a otro, aquel
plano también es paralelo al primero.
- Transitiva
- Si un plano es paralelo a otro plano, y
este segundo plano es a la vez paralelo
a un tercer plano, el primer plano
también es paralelo al tercer plano.
- Si un plano es paralelo a otro plano, y
este segundo plano es a la vez paralelo
a un tercer plano, el primer plano
también es paralelo al tercer plano.
- Reflexiva
- Distancia
- Formula distancia de
un punto a un plano
- Formula de los coheficientes
- d(P,π)=(|D2-D1|)/√A²+B²+C²
- d(P,π)=(|D2-D1|)/√A²+B²+C²
- Formula distancia de
un punto a un plano
- La misma distancia entre sí.
- Superficie donde se pueden
trazar puntos y rectas
- Espacios
vectoriales.
- Un conjunto no
vacío de objetos
- definidas dos
operaciones
- Suma y multiplicación
por escalares
- Números Reales
- Números Reales
- Sujetas a diez axiomas
- Los vectores u, v, y w en V
- los escalares c y d.
- 1. La suma de u y v,
denotada por u + v, está en V
- 2. u + v = v + u
- 3. (u + v)+ w = u + ( v + w )
- 4. Existe un vector 0
en V tal que u + 0 = u
- 5. Para cada u en V, existe un
vector –u en V tal que u + (-u ) = u.
- 6. El múltiplo escalar de u
por c, denotado cu, está en V
- 7. c( u + v ) = cu + cv
- 8. ( c+ d ) u = cu + du
- 9. c(du) = (cd)u
- 10. 1u=u
- Los vectores u, v, y w en V
- Suma y multiplicación
por escalares
- llamados vectores
- definidas dos
operaciones
- Un conjunto no
vacío de objetos
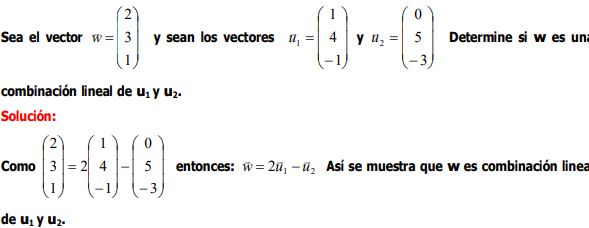
- Combinación lineal
- Es el vector que se obtiene al sumar dos o
mas vectores, multiplicados por escalares.
- Cualquier vector se puede poner como combinación
lineal de otros que tengan distinta dirección.
- Cualquier vector se puede poner como combinación
lineal de otros que tengan distinta dirección.
- Es el vector que se obtiene al sumar dos o
mas vectores, multiplicados por escalares.
Anexos de mídia
{kind=link}
Quer criar seus próprios Mapas Mentais gratuitos com a GoConqr? Saiba mais.