3589791
Descrição
Mapa Mental por Johann Andrés Argüello CRUZ, atualizado more than 1 year ago
|
|
Criado por Johann Andrés Argüello CRUZ
mais de 9 anos atrás
|
|
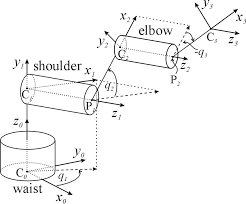
Closed-Form Kinematic And Dynamic
Models of an Industrial-Like RRR Robot
- KINEMATIC MODEL
- Calculation of Joint Motions Corresponding to a
Given Trajectory of the Robot’s End-Effector.
- Calculation of Joint Motions Corresponding to a
Given Trajectory of the Robot’s End-Effector.
- DINAMIC MODEL
- Provides Information About the Control Inputs
that Should be Applied to the Joint Actuators
- Provides Information About the Control Inputs
that Should be Applied to the Joint Actuators
- Adopting the LuGre Friction Model
- CLOSED-FORM
- Given Accuracy of Both Forward and Inverse
kinematics Solutions is Much Faster
- For Real Time Control
- Given Accuracy of Both Forward and Inverse
kinematics Solutions is Much Faster
- Is Focused on Control Laws Base
on a Computed Torque Method
- resolve non-linear plant dynamics and to enable
a simplified design of motion controllers
- resolve non-linear plant dynamics and to enable
a simplified design of motion controllers
- DH PARAMETERS OF 3R ROBOT
- Advantages of Closed-Form
For Inverse Kinematics
- Explicitly Control the Actual Posture
- Elbow Up (- ) or with the Elbow Down (+)
- Elbow Up (- ) or with the Elbow Down (+)
- Requires Far Less Computational Efforts
- Enables Direct Recognition of
Irregular Robot Configurations
- Explicitly Control the Actual Posture
- UNIVERSIDAD MANUELA BELTRÁN
ING. ELECTRÓNICA
- JOHANN A. ARGÜELLO C.
ROBÓTICA INDUSTRIAL
- JOHANN A. ARGÜELLO C.
ROBÓTICA INDUSTRIAL
- AUTHORS:
Dragan Kostik,
Ron Hensen,
Bram de Jager,
Maarten
Steinbuch,
Anexos de mídia
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Quer criar seus próprios Mapas Mentais gratuitos com a GoConqr? Saiba mais.