6529736
Descrição
Mapa Mental por william medina, atualizado more than 1 year ago
|
|
Criado por william medina
aproximadamente 8 anos atrás
|
|
HISTORIA DE LOS MECANISMOS
- Las máquinas y mecanismos fueron ideados desde el amanecer de la historia.
- ANTIGUOS EGIPCIOS
- Palanca, plano
inclinado y rodador de
troncos
- Palanca, plano
inclinado y rodador de
troncos
- CIVILIZACIÓN HELÉNICA
- Nace la mecánica como ciencia. Se crea la polea.
Tornillo de Arquimedes, Ruedas dentadas,
Engranajes de cremallera, odómetro primitivo.
- Nace la mecánica como ciencia. Se crea la polea.
Tornillo de Arquimedes, Ruedas dentadas,
Engranajes de cremallera, odómetro primitivo.
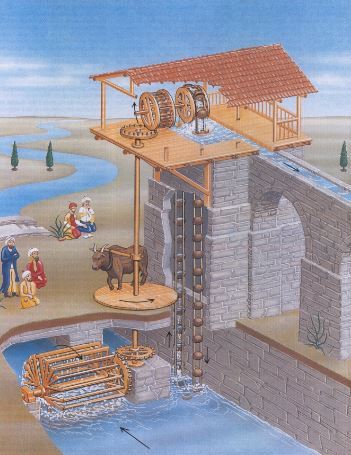
- ISLAM MEDIEVAL
- Se desarrollaron diversos mecanismos para ayudar con la
agricultura, tales como: La noria, el molino hidráulico, el
molino de viento, la presa hidráulica entre otros.
- Se desarrollaron diversos mecanismos para ayudar con la
agricultura, tales como: La noria, el molino hidráulico, el
molino de viento, la presa hidráulica entre otros.
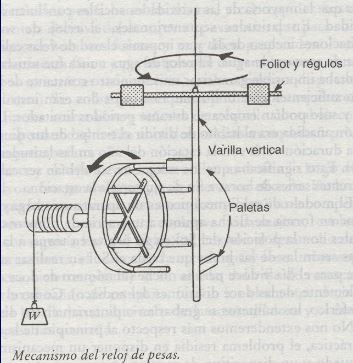
- EDAD MEDIA
- Se desarrolla: El relog de pesas, La imprenta, La
ballesta, entre otras armas para la guerra.
- Se desarrolla: El relog de pesas, La imprenta, La
ballesta, entre otras armas para la guerra.
- EL RENACIMIENTO
- El renacimiento abrio el paso grandes avances cientificos y
la creacion de nuevo mecanismos, entre estos la grua
giratoria, barco de palas, puente giratorio, entre otros.
- REVOLUCIÓN CIENTÍFICA
- El renacimiento impulso la revolución científica donde se empezó a
utilizar el metodo científico en el diseño de distintos mecanismos y
maquinas, esto dio paso a poder analizar los mecanismos de manera
matematica.
- REVOLUCIÓN INDUSTRIAL
- A mediados del siglo XVIII se inicia la revolución industrial en
Inglaterra, favorecida por una particular combinación de
factores económicos, sociales y políticos. En ella, la máquina de
vapor de Watt jugará un papel esencial, sustituyendo a las
ruedas hidráulicas como fuente de potencia. Los principales
focos de desarrollo se encontraban en la industria textil (con la
introducción del primer telar mecánico por Arkwright), y en la
minería.
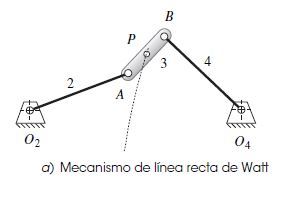
- James Watt (1736-1819)
- Eslabonamiento de linea recta
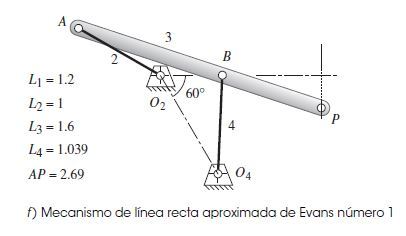
- Oliver Evans (1755-1819)
- Euler (1707-1783)
- Incluyó el concepto de que el movimiento plano consta de dos componentes
independientes, a saber, la traslación de un punto y la rotación del cuerpo en
torno a dicho punto. También sugirió la separación del problema de análisis
dinámico en “geométrico” y “mecánico” para simplificar la determinación de
la dinámica del sistema.
- Robert Willis (1800-1875)
- Contó cinco formas de obtener movimiento relativo entre eslabones de
entrada y salida: contacto rodante, contacto deslizante,
eslabonamientos, conectores envolventes (bandas, cadenas) y
polipastos (malacates de cuerda o cadena).
- Franz Reuleaux (1829-1905)
- Publicó Theoretische Kinematik en 1875. Muchas de sus ideas todavía son actuales y
útiles. Reuleaux definió seis componentes mecánicos básicos: el eslabón, la rueda,
la leva, el tornillo, el trinquete y la banda. También definió los pares “superiores” e
“inferiores”, los superiores tienen un contacto lineal o puntual (como en un cojinete
de rodillos o bolas) y los inferiores tienen un contacto superfi cial (como en las
juntas de pasador). Reuleaux en general es considerado como el padre de la
cinemática moderna
- Publicó Theoretische Kinematik en 1875. Muchas de sus ideas todavía son actuales y
útiles. Reuleaux definió seis componentes mecánicos básicos: el eslabón, la rueda,
la leva, el tornillo, el trinquete y la banda. También definió los pares “superiores” e
“inferiores”, los superiores tienen un contacto lineal o puntual (como en un cojinete
de rodillos o bolas) y los inferiores tienen un contacto superfi cial (como en las
juntas de pasador). Reuleaux en general es considerado como el padre de la
cinemática moderna
- Contó cinco formas de obtener movimiento relativo entre eslabones de
entrada y salida: contacto rodante, contacto deslizante,
eslabonamientos, conectores envolventes (bandas, cadenas) y
polipastos (malacates de cuerda o cadena).
- Incluyó el concepto de que el movimiento plano consta de dos componentes
independientes, a saber, la traslación de un punto y la rotación del cuerpo en
torno a dicho punto. También sugirió la separación del problema de análisis
dinámico en “geométrico” y “mecánico” para simplificar la determinación de
la dinámica del sistema.
- Eslabonamiento de linea recta para motor de vapor
- Euler (1707-1783)
- Eslabonamiento de linea recta
- SIGLO XX
- El siglo XX el avance con respecto a los mecanismos y maquinas se vieron mas
que todo envueltos fue en la creación de grandes avances en las 2 grandes
guerras del siglo, de igual manera se realizo un analisis mas teorico con respecto
a la cinematica de las maquinas.
- El siglo XX el avance con respecto a los mecanismos y maquinas se vieron mas
que todo envueltos fue en la creación de grandes avances en las 2 grandes
guerras del siglo, de igual manera se realizo un analisis mas teorico con respecto
a la cinematica de las maquinas.
- James Watt (1736-1819)
- A mediados del siglo XVIII se inicia la revolución industrial en
Inglaterra, favorecida por una particular combinación de
factores económicos, sociales y políticos. En ella, la máquina de
vapor de Watt jugará un papel esencial, sustituyendo a las
ruedas hidráulicas como fuente de potencia. Los principales
focos de desarrollo se encontraban en la industria textil (con la
introducción del primer telar mecánico por Arkwright), y en la
minería.
- REVOLUCIÓN INDUSTRIAL
- El renacimiento impulso la revolución científica donde se empezó a
utilizar el metodo científico en el diseño de distintos mecanismos y
maquinas, esto dio paso a poder analizar los mecanismos de manera
matematica.
- REVOLUCIÓN CIENTÍFICA
- El renacimiento abrio el paso grandes avances cientificos y
la creacion de nuevo mecanismos, entre estos la grua
giratoria, barco de palas, puente giratorio, entre otros.
- ANTIGUOS EGIPCIOS
Anexos de mídia
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Quer criar seus próprios Mapas Mentais gratuitos com a GoConqr? Saiba mais.